 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe ReSWARM Microgravity Flight Experiments: Planning, Control, and Model Estimation for On-Orbit Close Proximity Operations
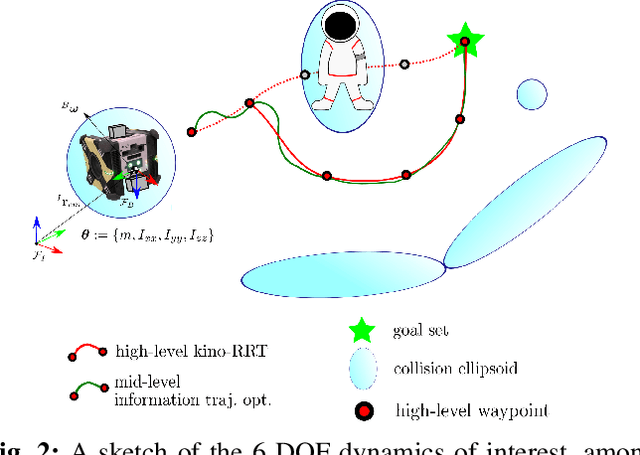
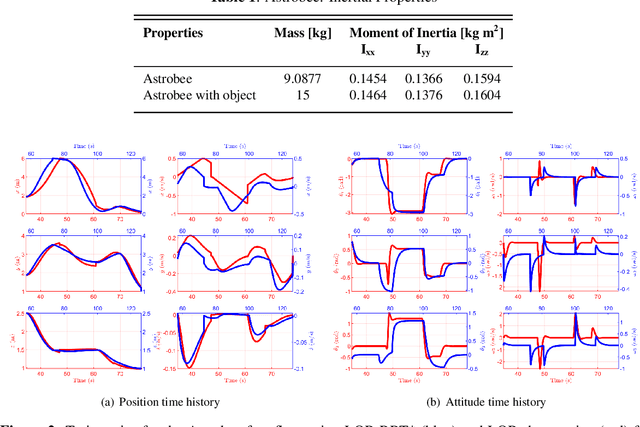
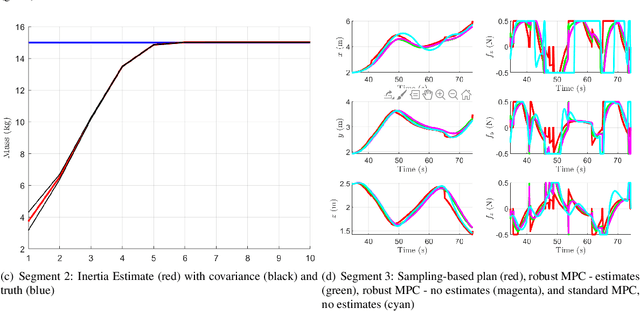
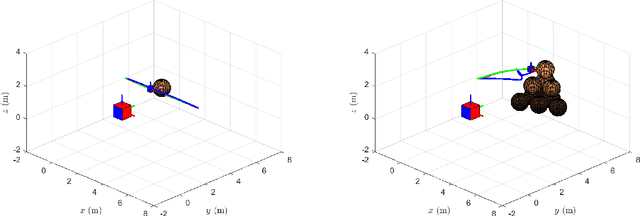
Jan 03, 2023On-orbit close proximity operations involve robotic spacecraft maneuvering and making decisions for a growing number of mission scenarios demanding autonomy, including on-orbit assembly, repair, and astronaut assistance. Of these scenarios, on-orbit assembly is an enabling technology that will allow large space structures to be built in-situ, using smaller building block modules. However, robotic on-orbit assembly involves a number of technical hurdles such as changing system models. For instance, grappled modules moved by a free-flying "assembler" robot can cause significant shifts in system inertial properties, which has cascading impacts on motion planning and control portions of the autonomy stack. Further, on-orbit assembly and other scenarios require collision-avoiding motion planning, particularly when operating in a "construction site" scenario of multiple assembler robots and structures. These complicating factors, relevant to many autonomous microgravity robotics use cases, are tackled in the ReSWARM flight experiments as a set of tests on the International Space Station using NASA's Astrobee robots. RElative Satellite sWarming and Robotic Maneuvering, or ReSWARM, demonstrates multiple key technologies for close proximity operations and on-orbit assembly: (1) global long-horizon planning, accomplished using offline and online sampling-based planner options that consider the system dynamics; (2) on-orbit reconfiguration model learning, using the recently-proposed RATTLE information-aware planning framework; and (3) robust control tools to provide low-level control robustness using current system knowledge. These approaches are detailed individually and in an "on-orbit assembly scenario" of multi-waypoint tracking on-orbit. Additionally, detail is provided discussing the practicalities of hardware implementation and unique aspects of working with Astrobee in microgravity.
The RATTLE Motion Planning Algorithm for Robust Online Parametric Model Improvement with On-Orbit Validation
Mar 03, 2022
Certain forms of uncertainty that robotic systems encounter can be explicitly learned within the context of a known model, like parametric model uncertainties such as mass and moments of inertia. Quantifying such parametric uncertainty is important for more accurate prediction of the system behavior, leading to safe and precise task execution. In tandem, providing a form of robustness guarantee against prevailing uncertainty levels like environmental disturbances and current model knowledge is also desirable. To that end, the authors' previously proposed RATTLE algorithm, a framework for online information-aware motion planning, is outlined and extended to enhance its applicability to real robotic systems. RATTLE provides a clear tradeoff between information-seeking motion and traditional goal-achieving motion and features online-updateable models. Additionally, online-updateable low level control robustness guarantees and a new method for automatic adjustment of information content down to a specified estimation precision is proposed. Results of extensive experimentation in microgravity using the Astrobee robots aboard the International Space Station and practical implementation details are presented, demonstrating RATTLE's capabilities for real-time, robust, online-updateable, and model information-seeking motion planning capabilities under parametric uncertainty.
Symplectic Momentum Neural Networks -- Using Discrete Variational Mechanics as a prior in Deep Learning
Jan 21, 2022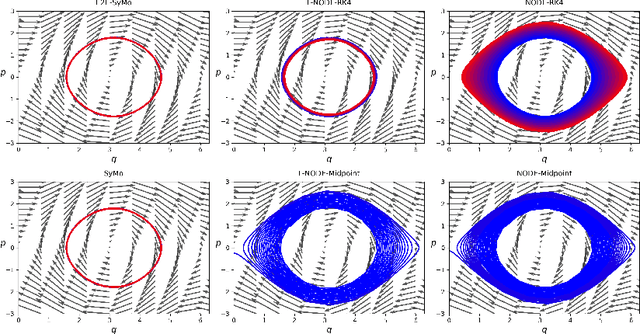
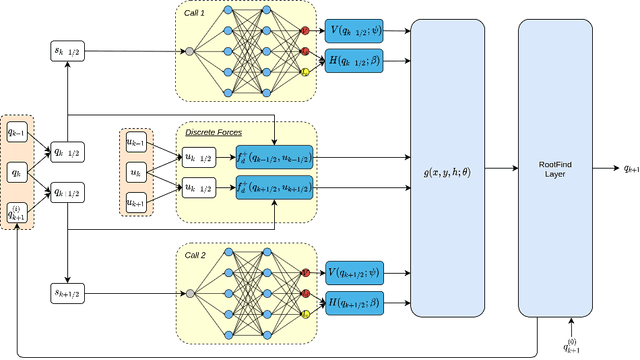
With deep learning being gaining attention from the research community for prediction and control of real physical systems, learning important representations is becoming now more than ever mandatory. It is of extremely importance that deep learning representations are coherent with physics. When learning from discrete data this can be guaranteed by including some sort of prior into the learning, however not all discretization priors preserve important structures from the physics. In this paper we introduce Symplectic Momentum Neural Networks (SyMo) as models from a discrete formulation of mechanics for non-separable mechanical systems. The combination of such formulation leads SyMos to be constrained towards preserving important geometric structures such as momentum and a symplectic form and learn from limited data. Furthermore, it allows to learn dynamics only from the poses as training data. We extend SyMos to include variational integrators within the learning framework by developing an implicit root-find layer which leads to End-to-End Symplectic Momentum Neural Networks (E2E-SyMo). Through experimental results, using the pendulum and cartpole we show that such combination not only allows these models tol earn from limited data but also provides the models with the capability of preserving the symplectic form and show better long-term behaviour.
Online Information-Aware Motion Planning with Inertial Parameter Learning for Robotic Free-Flyers
Dec 11, 2021
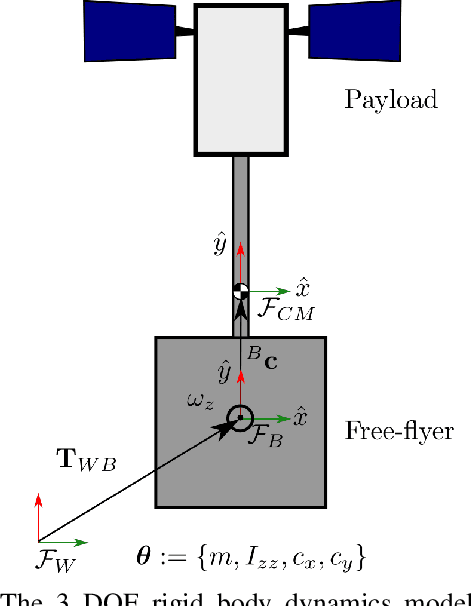
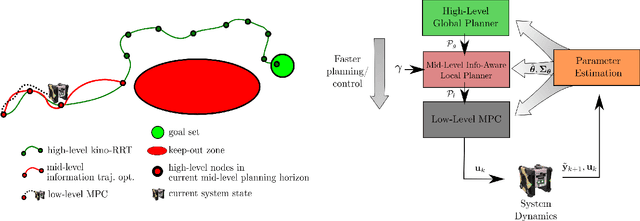
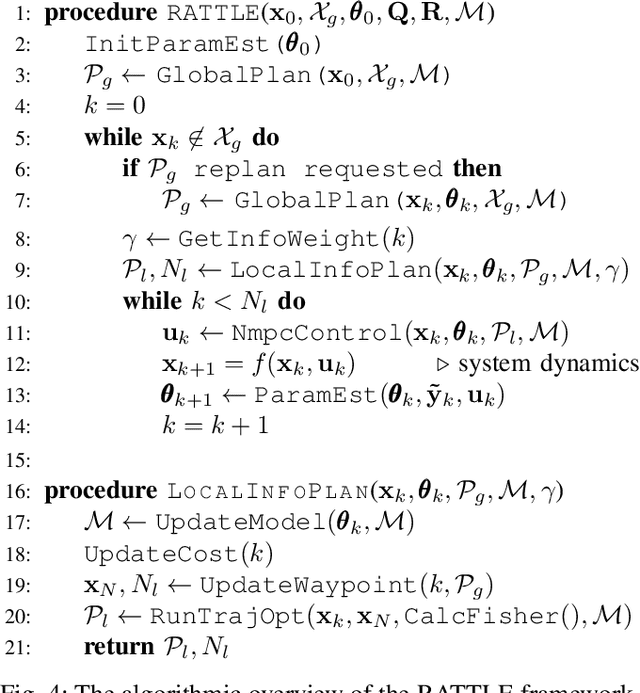
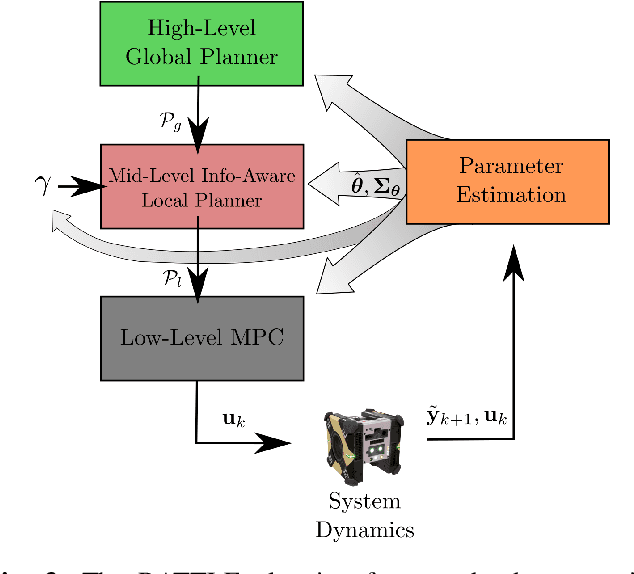
Space free-flyers like the Astrobee robots currently operating aboard the International Space Station must operate with inherent system uncertainties. Parametric uncertainties like mass and moment of inertia are especially important to quantify in these safety-critical space systems and can change in scenarios such as on-orbit cargo movement, where unknown grappled payloads significantly change the system dynamics. Cautiously learning these uncertainties en route can potentially avoid time- and fuel-consuming pure system identification maneuvers. Recognizing this, this work proposes RATTLE, an online information-aware motion planning algorithm that explicitly weights parametric model-learning coupled with real-time replanning capability that can take advantage of improved system models. The method consists of a two-tiered (global and local) planner, a low-level model predictive controller, and an online parameter estimator that produces estimates of the robot's inertial properties for more informed control and replanning on-the-fly; all levels of the planning and control feature online update-able models. Simulation results of RATTLE for the Astrobee free-flyer grappling an uncertain payload are presented alongside results of a hardware demonstration showcasing the ability to explicitly encourage model parametric learning while achieving otherwise useful motion.
Safe and Uncertainty-Aware Robotic Motion Planning Techniques for Agile On-Orbit Assembly
Feb 20, 2021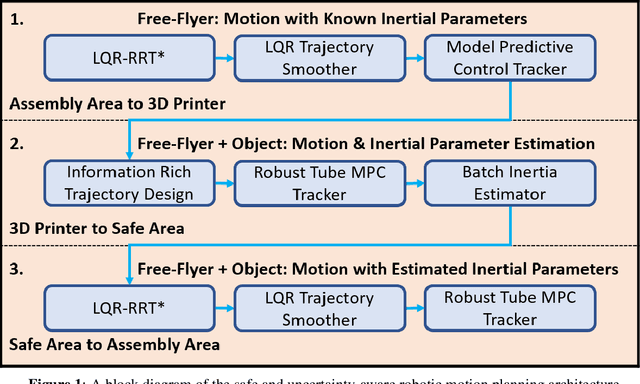
As access to space and robotic autonomy capabilities move forward, there is simultaneously a growing interest in deploying large, complex space structures to provide new on-orbit capabilities. New space-borne observatories, large orbital outposts, and even futuristic on-orbit manufacturing will be enabled by robotic assembly of space structures using techniques like on-orbit additive manufacturing which can provide flexibility in constructing and even repairing complex hardware. However, the dynamics underlying the robotic assembler during manipulation may operate under inertial uncertainties. Thus, inertial estimation of the robot and the manipulated component system must be considered during structural assembly. The contribution of this work is to address both the motion planning and control for robotic assembly with consideration of the inertial estimation of the combined free-flying robotic assembler and additively manufactured component system. Specifically, the Linear Quadratic Regulator Rapidly-Exploring Randomized Trees (LQR-RRT*) and dynamically feasible path smoothing are used to obtain obstacle-free trajectories for the system. Further, model learning is incorporated explicitly into the planning stages via approximation of the continuous system and accompanying reward of performing safe, objective-oriented motion. Remaining uncertainty can then be dealt with using robust tube model predictive control. By obtaining controlled trajectories that consider both obstacle avoidance and learning of the inertial properties of the free-flyer and manipulated component system, the free-flyer rapidly considers and plans the construction of space structures with enhanced system knowledge. The approach naturally generalizes to repairing, refueling, and re-provisioning space structure components while providing optimal collision-free trajectories under e.g., inertial uncertainty.
Combining Parameter Identification and Trajectory Optimization: Real-time Planning for Information Gain
Jun 06, 2019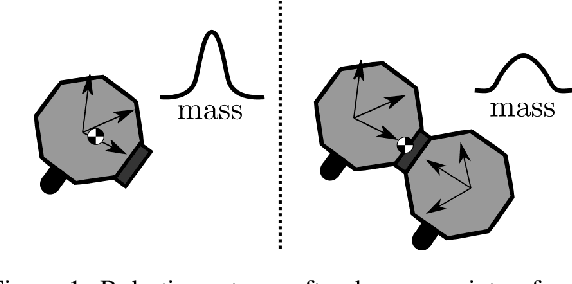
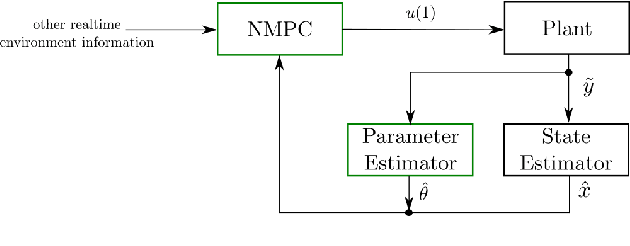
Robotic systems often operate with uncertainties in their dynamics, for example, unknown inertial properties. Broadly, there are two approaches for controlling uncertain systems: design robust controllers in spite of uncertainty, or characterize a system before attempting to control it. This paper proposes a middle-ground approach, making trajectory progress while also accounting for gaining information about the system. More specifically, it combines excitation trajectories which are usually intended to optimize information gain for an estimator, with goal-driven trajectory optimization metrics. For this purpose, a measure of information gain is incorporated (using the Fisher Information Matrix) in a real-time planning framework to produce trajectories favorable for estimation. At the same time, the planner receives stable parameter updates from the estimator, enhancing the system model. An implementation of this learn-as-you-go approach utilizing an Unscented Kalman Filter (UKF) and Nonlinear Model Predictive Controller (NMPC) is demonstrated in simulation. Results for cases with and without information gain and online parameter updates in the system model are presented.
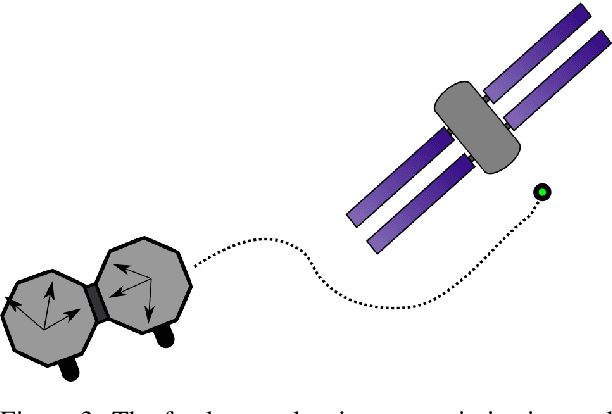
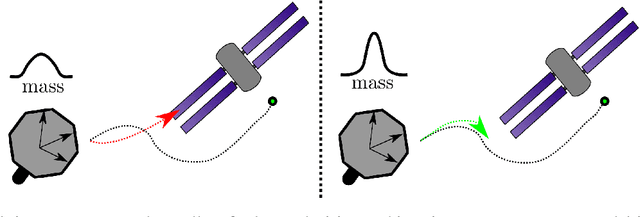
An Energy Balance Based Method for Parameter Identification of a Free-Flying Robot Grasping An Unknown Object
Mar 15, 2018
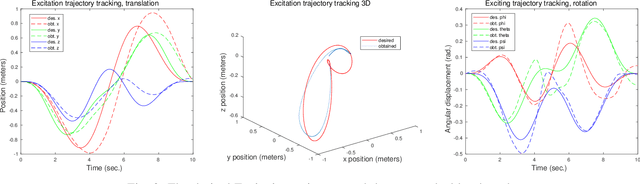
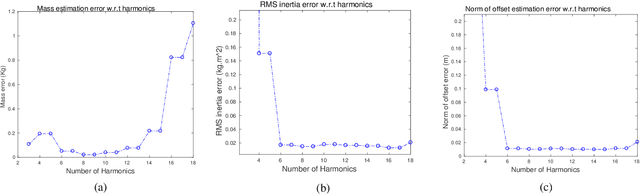
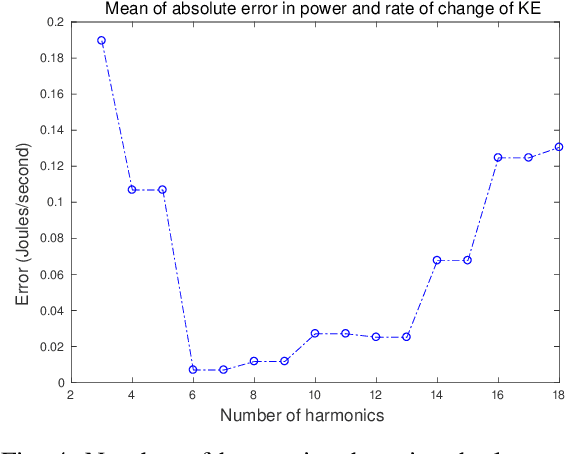
The estimation of inertial parameters of a robotic system is crucial for better trajectory tracking performance, specially when model-based controllers are used for carrying out precise tasks. In this paper, we consider the scenario of grasping an object of unknown properties by a free-flyer space robot with limited actuation. The problem is to find the inertial parameters of the complete system after grasping has been performed. Excitation is provided in inertial space, and the excitation trajectories are found by optimization. Truncated Fourier series are used to represent the reference as well as tracked trajectory. An approach based on the energy balance between the actuation work and the rate of change of kinetic energy is introduced to calculate the number of harmonics in the Fourier series used to represent the executed trajectory, while trying to find a balance between accounting for saturation effects and keeping out noise. The effect of input saturation on parameter estimation is also studied. Simulation results using the Space CoBot free-flyer robot are presented to show the feasibility of the approach.