 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe and Uncertainty-Aware Robotic Motion Planning Techniques for Agile On-Orbit Assembly
Paper and Code
Feb 20, 2021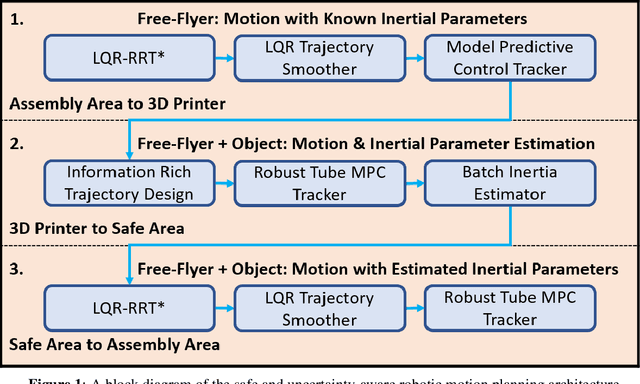
As access to space and robotic autonomy capabilities move forward, there is simultaneously a growing interest in deploying large, complex space structures to provide new on-orbit capabilities. New space-borne observatories, large orbital outposts, and even futuristic on-orbit manufacturing will be enabled by robotic assembly of space structures using techniques like on-orbit additive manufacturing which can provide flexibility in constructing and even repairing complex hardware. However, the dynamics underlying the robotic assembler during manipulation may operate under inertial uncertainties. Thus, inertial estimation of the robot and the manipulated component system must be considered during structural assembly. The contribution of this work is to address both the motion planning and control for robotic assembly with consideration of the inertial estimation of the combined free-flying robotic assembler and additively manufactured component system. Specifically, the Linear Quadratic Regulator Rapidly-Exploring Randomized Trees (LQR-RRT*) and dynamically feasible path smoothing are used to obtain obstacle-free trajectories for the system. Further, model learning is incorporated explicitly into the planning stages via approximation of the continuous system and accompanying reward of performing safe, objective-oriented motion. Remaining uncertainty can then be dealt with using robust tube model predictive control. By obtaining controlled trajectories that consider both obstacle avoidance and learning of the inertial properties of the free-flyer and manipulated component system, the free-flyer rapidly considers and plans the construction of space structures with enhanced system knowledge. The approach naturally generalizes to repairing, refueling, and re-provisioning space structure components while providing optimal collision-free trajectories under e.g., inertial uncertainty.