 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Energy Balance Based Method for Parameter Identification of a Free-Flying Robot Grasping An Unknown Object
Paper and Code
Mar 15, 2018
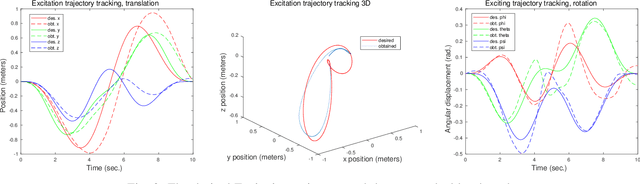
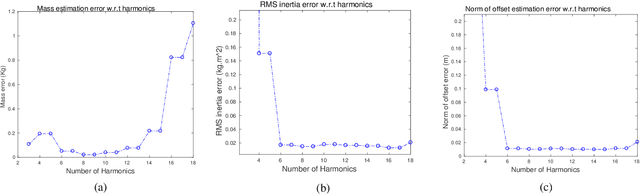
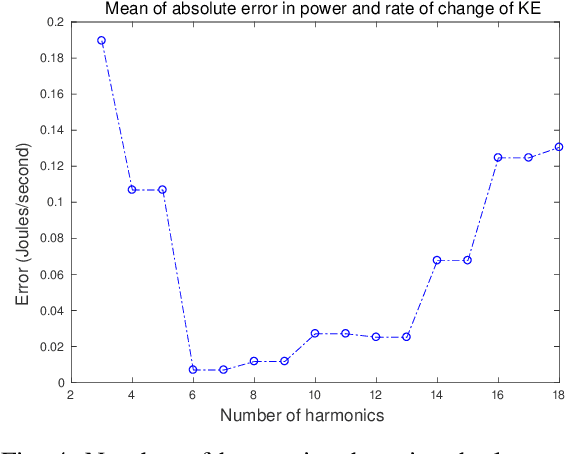
The estimation of inertial parameters of a robotic system is crucial for better trajectory tracking performance, specially when model-based controllers are used for carrying out precise tasks. In this paper, we consider the scenario of grasping an object of unknown properties by a free-flyer space robot with limited actuation. The problem is to find the inertial parameters of the complete system after grasping has been performed. Excitation is provided in inertial space, and the excitation trajectories are found by optimization. Truncated Fourier series are used to represent the reference as well as tracked trajectory. An approach based on the energy balance between the actuation work and the rate of change of kinetic energy is introduced to calculate the number of harmonics in the Fourier series used to represent the executed trajectory, while trying to find a balance between accounting for saturation effects and keeping out noise. The effect of input saturation on parameter estimation is also studied. Simulation results using the Space CoBot free-flyer robot are presented to show the feasibility of the approach.