 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Systematic Evaluation of Retrieval-Augmented Generation and Language Models for Space Operations
May 23, 2026The rapid expansion of space activities has led to an unprecedented accumulation of technical documentation, operational guidelines, and scientific literature, creating challenges for timely decision-making in space operations. Effective management in space operations requires tools capable of efficiently processing vast and heterogeneous information sources. This paper systematically evaluates the performance of Retrieval Augmented Generation (RAG) pipelines, combining Large Language Models (LLMs) with information retrieval techniques for extracting and synthesizing actionable knowledge from domain-specific documents. We compare various retrieval strategies, embedding models, and LLM answers to assess their impact on information accuracy, relevance, and reliability. Our results demonstrate that RAG pipelines can significantly enhance knowledge access, reduce uncertainty, and support decision-making in complex space operations.
Generalizing Trilateration: Approximate Maximum Likelihood Estimator for Initial Orbit Determination in Low-Earth Orbit
Jul 21, 2024



With the increase in the number of active satellites and space debris in orbit, the problem of initial orbit determination (IOD) becomes increasingly important, demanding a high accuracy. Over the years, different approaches have been presented such as filtering methods (for example, Extended Kalman Filter), differential algebra or solving Lambert's problem. In this work, we consider a setting of three monostatic radars, where all available measurements are taken approximately at the same instant. This follows a similar setting as trilateration, a state-of-the-art approach, where each radar is able to obtain a single measurement of range and range-rate. Differently, and due to advances in Multiple-Input Multiple-Output (MIMO) radars, we assume that each location is able to obtain a larger set of range, angle and Doppler shift measurements. Thus, our method can be understood as an extension of trilateration leveraging more recent technology and incorporating additional data. We formulate the problem as a Maximum Likelihood Estimator (MLE), which for some number of observations is asymptotically unbiased and asymptotically efficient. Through numerical experiments, we demonstrate that our method attains the same accuracy as the trilateration method for the same number of measurements and offers an alternative and generalization, returning a more accurate estimation of the satellite's state vector, as the number of available measurements increases.
One-Shot Initial Orbit Determination in Low-Earth Orbit
Dec 20, 2023



Due to the importance of satellites for society and the exponential increase in the number of objects in orbit, it is important to accurately determine the state (e.g., position and velocity) of these Resident Space Objects (RSOs) at any time and in a timely manner. State-of-the-art methodologies for initial orbit determination consist of Kalman-type filters that process sequential data over time and return the state and associated uncertainty of the object, as is the case of the Extended Kalman Filter (EKF). However, these methodologies are dependent on a good initial guess for the state vector and usually simplify the physical dynamical model, due to the difficulty of precisely modeling perturbative forces, such as atmospheric drag and solar radiation pressure. Other approaches do not require assumptions about the dynamical system, such as the trilateration method, and require simultaneous measurements, such as three measurements of range and range-rate for the particular case of trilateration. We consider the same setting of simultaneous measurements (one-shot), resorting to time delay and Doppler shift measurements. Based on recent advancements in the problem of moving target localization for sonar multistatic systems, we are able to formulate the problem of initial orbit determination as a Weighted Least Squares. With this approach, we are able to directly obtain the state of the object (position and velocity) and the associated covariance matrix from the Fisher's Information Matrix (FIM). We demonstrate that, for small noise, our estimator is able to attain the Cram\'er-Rao Lower Bound accuracy, i.e., the accuracy attained by the unbiased estimator with minimum variance. We also numerically demonstrate that our estimator is able to attain better accuracy on the state estimation than the trilateration method and returns a smaller uncertainty associated with the estimation.
Predicting the Probability of Collision of a Satellite with Space Debris: A Bayesian Machine Learning Approach
Nov 17, 2023



Space is becoming more crowded in Low Earth Orbit due to increased space activity. Such a dense space environment increases the risk of collisions between space objects endangering the whole space population. Therefore, the need to consider collision avoidance as part of routine operations is evident to satellite operators. Current procedures rely on the analysis of multiple collision warnings by human analysts. However, with the continuous growth of the space population, this manual approach may become unfeasible, highlighting the importance of automation in risk assessment. In 2019, ESA launched a competition to study the feasibility of applying machine learning in collision risk estimation and released a dataset that contained sequences of Conjunction Data Messages (CDMs) in support of real close encounters. The competition results showed that the naive forecast and its variants are strong predictors for this problem, which suggests that the CDMs may follow the Markov property. The proposed work investigates this theory by benchmarking Hidden Markov Models (HMM) in predicting the risk of collision between two resident space objects by using one feature of the entire dataset: the sequence of the probability in the CDMs. In addition, Bayesian statistics are used to infer a joint distribution for the parameters of the models, which allows the development of robust and reliable probabilistic predictive models that can incorporate physical or prior knowledge about the problem within a rigorous theoretical framework and provides prediction uncertainties that nicely reflect the accuracy of the predicted risk. This work shows that the implemented HMM outperforms the naive solution in some metrics, which further adds to the idea that the collision warnings may be Markovian and suggests that this is a powerful method to be further explored.
Finding Real-World Orbital Motion Laws from Data
Nov 16, 2023



A novel approach is presented for discovering PDEs that govern the motion of satellites in space. The method is based on SINDy, a data-driven technique capable of identifying the underlying dynamics of complex physical systems from time series data. SINDy is utilized to uncover PDEs that describe the laws of physics in space, which are non-deterministic and influenced by various factors such as drag or the reference area (related to the attitude of the satellite). In contrast to prior works, the physically interpretable coordinate system is maintained, and no dimensionality reduction technique is applied to the data. By training the model with multiple representative trajectories of LEO - encompassing various inclinations, eccentricities, and altitudes - and testing it with unseen orbital motion patterns, a mean error of around 140 km for the positions and 0.12 km/s for the velocities is achieved. The method offers the advantage of delivering interpretable, accurate, and complex models of orbital motion that can be employed for propagation or as inputs to predictive models for other variables of interest, such as atmospheric drag or the probability of collision in an encounter with a spacecraft or space objects. In conclusion, the work demonstrates the promising potential of using SINDy to discover the equations governing the behaviour of satellites in space. The technique has been successfully applied to uncover PDEs describing the motion of satellites in LEO with high accuracy. The method possesses several advantages over traditional models, including the ability to provide physically interpretable, accurate, and complex models of orbital motion derived from high-entropy datasets. These models can be utilised for propagation or as inputs to predictive models for other variables of interest.
Statistical Learning of Conjunction Data Messages Through a Bayesian Non-Homogeneous Poisson Process
Nov 15, 2023Current approaches for collision avoidance and space traffic management face many challenges, mainly due to the continuous increase in the number of objects in orbit and the lack of scalable and automated solutions. To avoid catastrophic incidents, satellite owners/operators must be aware of their assets' collision risk to decide whether a collision avoidance manoeuvre needs to be performed. This process is typically executed through the use of warnings issued in the form of CDMs which contain information about the event, such as the expected TCA and the probability of collision. Our previous work presented a statistical learning model that allowed us to answer two important questions: (1) Will any new conjunctions be issued in the next specified time interval? (2) When and with what uncertainty will the next CDM arrive? However, the model was based on an empirical Bayes homogeneous Poisson process, which assumes that the arrival rates of CDMs are constant over time. In fact, the rate at which the CDMs are issued depends on the behaviour of the objects as well as on the screening process performed by third parties. Thus, in this work, we extend the previous study and propose a Bayesian non-homogeneous Poisson process implemented with high precision using a Probabilistic Programming Language to fully describe the underlying phenomena. We compare the proposed solution with a baseline model to demonstrate the added value of our approach. The results show that this problem can be successfully modelled by our Bayesian non-homogeneous Poisson Process with greater accuracy, contributing to the development of automated collision avoidance systems and helping operators react timely but sparingly with satellite manoeuvres.
Probability of Collision of satellites and space debris for short-term encounters: Rederivation and fast-to-compute upper and lower bounds
Nov 15, 2023

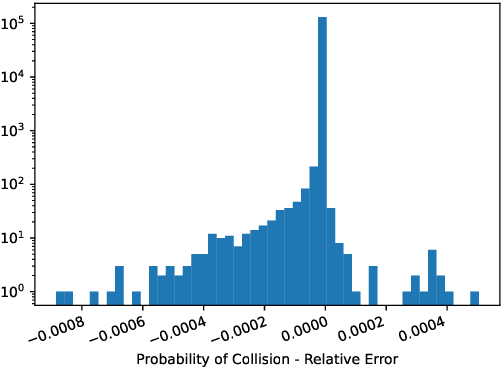
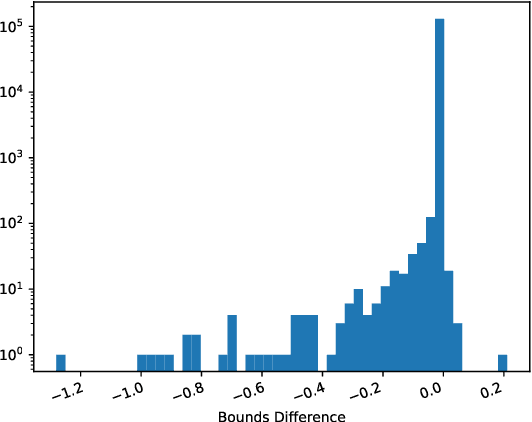
The proliferation of space debris in LEO has become a major concern for the space industry. With the growing interest in space exploration, the prediction of potential collisions between objects in orbit has become a crucial issue. It is estimated that, in orbit, there are millions of fragments a few millimeters in size and thousands of inoperative satellites and discarded rocket stages. Given the high speeds that these fragments can reach, even fragments a few millimeters in size can cause fractures in a satellite's hull or put a serious crack in the window of a space shuttle. The conventional method proposed by Akella and Alfriend in 2000 remains widely used to estimate the probability of collision in short-term encounters. Given the small period of time, it is assumed that, during the encounter: (1) trajectories are represented by straight lines with constant velocity; (2) there is no velocity uncertainty and the position exhibits a stationary distribution throughout the encounter; and (3) position uncertainties are independent and represented by Gaussian distributions. This study introduces a novel derivation based on first principles that naturally allows for tight and fast upper and lower bounds for the probability of collision. We tested implementations of both probability and bound computations with the original and our formulation on a real CDM dataset used in ESA's Collision Avoidance Challenge. Our approach reduces the calculation of the probability to two one-dimensional integrals and has the potential to significantly reduce the processing time compared to the traditional method, from 80% to nearly real-time.
Taxonomy for Resident Space Objects in LEO: A Deep Learning Approach
Nov 15, 2023



The increasing number of RSOs has raised concerns about the risk of collisions and catastrophic incidents for all direct and indirect users of space. To mitigate this issue, it is essential to have a good understanding of the various RSOs in orbit and their behaviour. A well-established taxonomy defining several classes of RSOs is a critical step in achieving this understanding. This taxonomy helps assign objects to specific categories based on their main characteristics, leading to better tracking services. Furthermore, a well-established taxonomy can facilitate research and analysis processes by providing a common language and framework for better understanding the factors that influence RSO behaviour in space. These factors, in turn, help design more efficient and effective strategies for space traffic management. Our work proposes a new taxonomy for RSOs focusing on the low Earth orbit regime to enhance space traffic management. In addition, we present a deep learning-based model that uses an autoencoder architecture to reduce the features representing the characteristics of the RSOs. The autoencoder generates a lower-dimensional space representation that is then explored using techniques such as Uniform Manifold Approximation and Projection to identify fundamental clusters of RSOs based on their unique characteristics. This approach captures the complex and non-linear relationships between the features and the RSOs' classes identified. Our proposed taxonomy and model offer a significant contribution to the ongoing efforts to mitigate the overall risks posed by the increasing number of RSOs in orbit.
Predicting the Position Uncertainty at the Time of Closest Approach with Diffusion Models
Nov 15, 2023



The risk of collision between resident space objects has significantly increased in recent years. As a result, spacecraft collision avoidance procedures have become an essential part of satellite operations. To ensure safe and effective space activities, satellite owners and operators rely on constantly updated estimates of encounters. These estimates include the uncertainty associated with the position of each object at the expected TCA. These estimates are crucial in planning risk mitigation measures, such as collision avoidance manoeuvres. As the TCA approaches, the accuracy of these estimates improves, as both objects' orbit determination and propagation procedures are made for increasingly shorter time intervals. However, this improvement comes at the cost of taking place close to the critical decision moment. This means that safe avoidance manoeuvres might not be possible or could incur significant costs. Therefore, knowing the evolution of this variable in advance can be crucial for operators. This work proposes a machine learning model based on diffusion models to forecast the position uncertainty of objects involved in a close encounter, particularly for the secondary object (usually debris), which tends to be more unpredictable. We compare the performance of our model with other state-of-the-art solutions and a na\"ive baseline approach, showing that the proposed solution has the potential to significantly improve the safety and effectiveness of spacecraft operations.
Conjunction Data Messages for Space Collision Behave as a Poisson Process
Mar 27, 2023



Space debris is a major problem in space exploration. International bodies continuously monitor a large database of orbiting objects and emit warnings in the form of conjunction data messages. An important question for satellite operators is to estimate when fresh information will arrive so that they can react timely but sparingly with satellite maneuvers. We propose a statistical learning model of the message arrival process, allowing us to answer two important questions: (1) Will there be any new message in the next specified time interval? (2) When exactly and with what uncertainty will the next message arrive? The average prediction error for question (2) of our Bayesian Poisson process model is smaller than the baseline in more than 4 hours in a test set of 50k close encounter events.