 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Learning for Dynamic Constellation Topologies
Mar 26, 2026The use of satellite networks has increased significantly in recent years due to their advantages over purely terrestrial systems, such as higher availability and coverage. However, to effectively provide these services, satellite networks must cope with the continuous orbital movement and maneuvering of their nodes and the impact on the network's topology. In this work, we address the problem of (dynamic) network topology configuration under the online learning framework. As a byproduct, our approach does not assume structure about the network, such as known orbital planes (that could be violated by maneuvering satellites). We empirically demonstrate that our problem formulation matches the performance of state-of-the-art offline methods. Importantly, we demonstrate that our approach is amenable to constrained online learning, exhibiting a trade-off between computational complexity per iteration and convergence to a final strategy.
Generalizing Trilateration: Approximate Maximum Likelihood Estimator for Initial Orbit Determination in Low-Earth Orbit
Jul 21, 2024



With the increase in the number of active satellites and space debris in orbit, the problem of initial orbit determination (IOD) becomes increasingly important, demanding a high accuracy. Over the years, different approaches have been presented such as filtering methods (for example, Extended Kalman Filter), differential algebra or solving Lambert's problem. In this work, we consider a setting of three monostatic radars, where all available measurements are taken approximately at the same instant. This follows a similar setting as trilateration, a state-of-the-art approach, where each radar is able to obtain a single measurement of range and range-rate. Differently, and due to advances in Multiple-Input Multiple-Output (MIMO) radars, we assume that each location is able to obtain a larger set of range, angle and Doppler shift measurements. Thus, our method can be understood as an extension of trilateration leveraging more recent technology and incorporating additional data. We formulate the problem as a Maximum Likelihood Estimator (MLE), which for some number of observations is asymptotically unbiased and asymptotically efficient. Through numerical experiments, we demonstrate that our method attains the same accuracy as the trilateration method for the same number of measurements and offers an alternative and generalization, returning a more accurate estimation of the satellite's state vector, as the number of available measurements increases.
One-Shot Initial Orbit Determination in Low-Earth Orbit
Dec 20, 2023



Due to the importance of satellites for society and the exponential increase in the number of objects in orbit, it is important to accurately determine the state (e.g., position and velocity) of these Resident Space Objects (RSOs) at any time and in a timely manner. State-of-the-art methodologies for initial orbit determination consist of Kalman-type filters that process sequential data over time and return the state and associated uncertainty of the object, as is the case of the Extended Kalman Filter (EKF). However, these methodologies are dependent on a good initial guess for the state vector and usually simplify the physical dynamical model, due to the difficulty of precisely modeling perturbative forces, such as atmospheric drag and solar radiation pressure. Other approaches do not require assumptions about the dynamical system, such as the trilateration method, and require simultaneous measurements, such as three measurements of range and range-rate for the particular case of trilateration. We consider the same setting of simultaneous measurements (one-shot), resorting to time delay and Doppler shift measurements. Based on recent advancements in the problem of moving target localization for sonar multistatic systems, we are able to formulate the problem of initial orbit determination as a Weighted Least Squares. With this approach, we are able to directly obtain the state of the object (position and velocity) and the associated covariance matrix from the Fisher's Information Matrix (FIM). We demonstrate that, for small noise, our estimator is able to attain the Cram\'er-Rao Lower Bound accuracy, i.e., the accuracy attained by the unbiased estimator with minimum variance. We also numerically demonstrate that our estimator is able to attain better accuracy on the state estimation than the trilateration method and returns a smaller uncertainty associated with the estimation.
Probability of Collision of satellites and space debris for short-term encounters: Rederivation and fast-to-compute upper and lower bounds
Nov 15, 2023

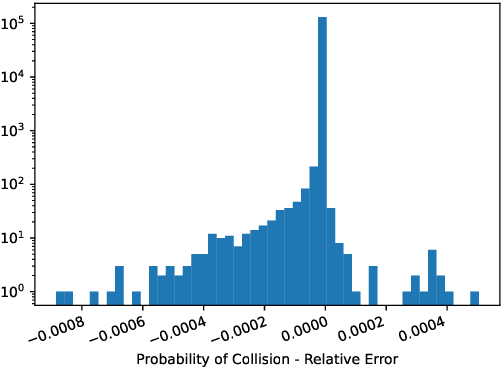
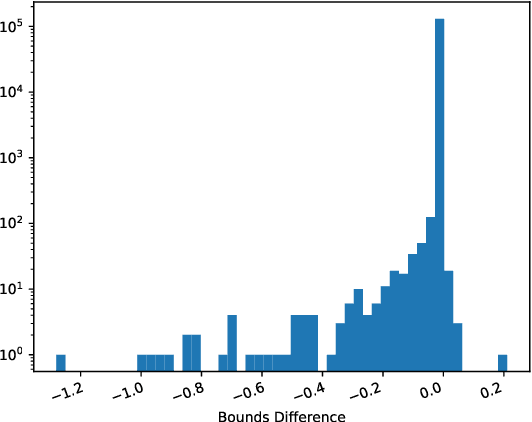
The proliferation of space debris in LEO has become a major concern for the space industry. With the growing interest in space exploration, the prediction of potential collisions between objects in orbit has become a crucial issue. It is estimated that, in orbit, there are millions of fragments a few millimeters in size and thousands of inoperative satellites and discarded rocket stages. Given the high speeds that these fragments can reach, even fragments a few millimeters in size can cause fractures in a satellite's hull or put a serious crack in the window of a space shuttle. The conventional method proposed by Akella and Alfriend in 2000 remains widely used to estimate the probability of collision in short-term encounters. Given the small period of time, it is assumed that, during the encounter: (1) trajectories are represented by straight lines with constant velocity; (2) there is no velocity uncertainty and the position exhibits a stationary distribution throughout the encounter; and (3) position uncertainties are independent and represented by Gaussian distributions. This study introduces a novel derivation based on first principles that naturally allows for tight and fast upper and lower bounds for the probability of collision. We tested implementations of both probability and bound computations with the original and our formulation on a real CDM dataset used in ESA's Collision Avoidance Challenge. Our approach reduces the calculation of the probability to two one-dimensional integrals and has the potential to significantly reduce the processing time compared to the traditional method, from 80% to nearly real-time.
RF signal classification in hardware with an RF spintronic neural network
Nov 02, 2022Extracting information from radiofrequency (RF) signals using artificial neural networks at low energy cost is a critical need for a wide range of applications. Here we show how to leverage the intrinsic dynamics of spintronic nanodevices called magnetic tunnel junctions to process multiple analogue RF inputs in parallel and perform synaptic operations. Furthermore, we achieve classification of RF signals with experimental data from magnetic tunnel junctions as neurons and synapses, with the same accuracy as an equivalent software neural network. These results are a key step for embedded radiofrequency artificial intelligence.
Probabilistic Registration for Gaussian Process 3D shape modelling in the presence of extensive missing data
Mar 26, 2022

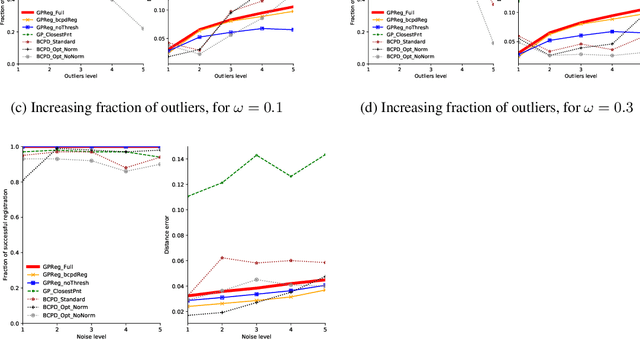

Gaussian Processes are a powerful tool for shape modelling. While the existing methods on this area prove to work well for the general case of the human head, when looking at more detailed and deformed data, with a high prevalence of missing data, such as the ears, the results are not satisfactory. In order to overcome this, we formulate the shape fitting problem as a multi-annotator Gaussian Process Regression and establish a parallel with the standard probabilistic registration. The achieved method GPReg shows better performance when dealing with extensive areas of missing data when compared to a state-of-the-art registration method and the current approach for registration with GP.
Deep Neural Networks for Approximating Stream Reasoning with C-SPARQL
Jun 15, 2021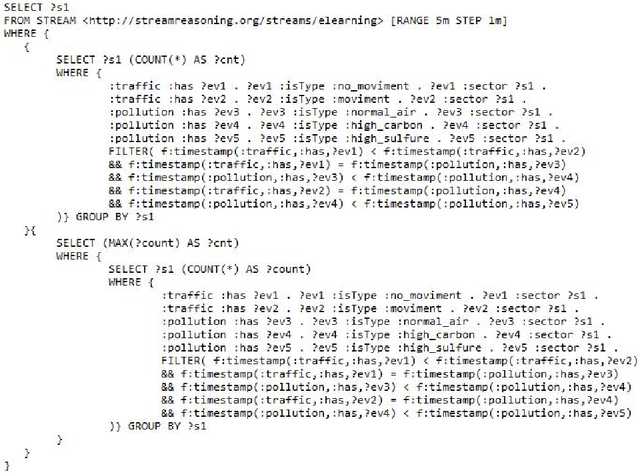
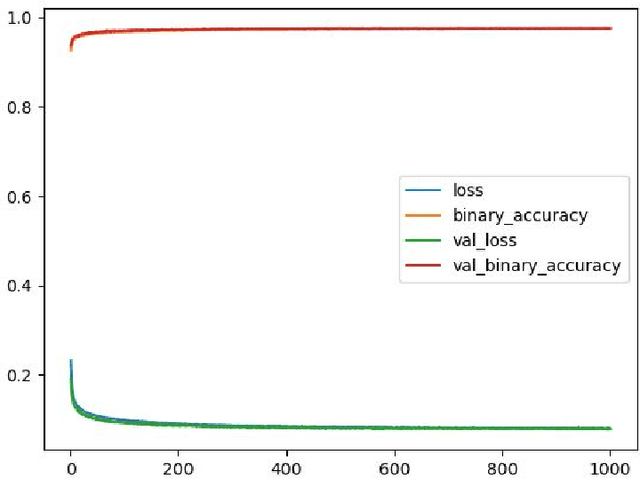
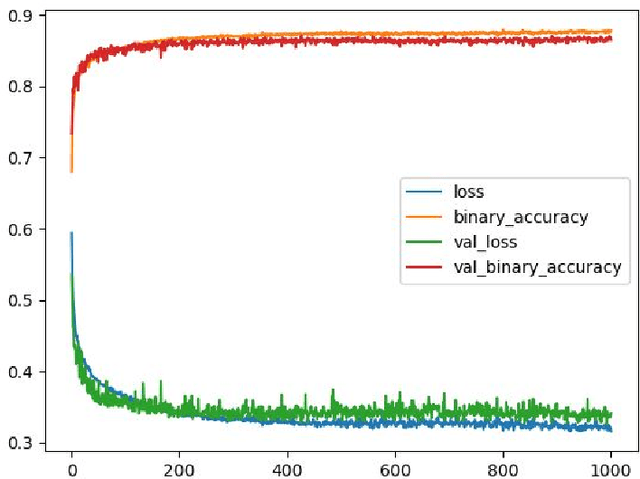
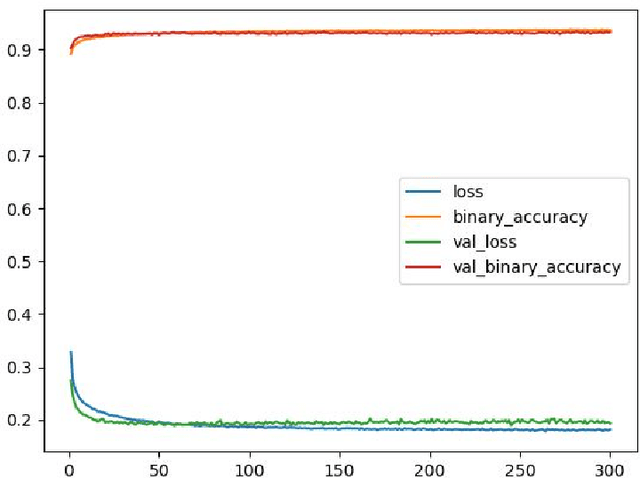
The amount of information produced, whether by newspapers, blogs and social networks, or by monitoring systems, is increasing rapidly. Processing all this data in real-time, while taking into consideration advanced knowledge about the problem domain, is challenging, but required in scenarios where assessing potential risks in a timely fashion is critical. C-SPARQL, a language for continuous queries over streams of RDF data, is one of the more prominent approaches in stream reasoning that provides such continuous inference capabilities over dynamic data that go beyond mere stream processing. However, it has been shown that, in the presence of huge amounts of data, C-SPARQL may not be able to answer queries in time, in particular when the frequency of incoming data is higher than the time required for reasoning with that data. In this paper, we investigate whether reasoning with C-SPARQL can be approximated using Recurrent Neural Networks and Convolutional Neural Networks, two neural network architectures that have been shown to be well-suited for time series forecasting and time series classification, to leverage on their higher processing speed once the network has been trained. We consider a variety of different kinds of queries and obtain overall positive results with high accuracies while improving processing time often by several orders of magnitude.
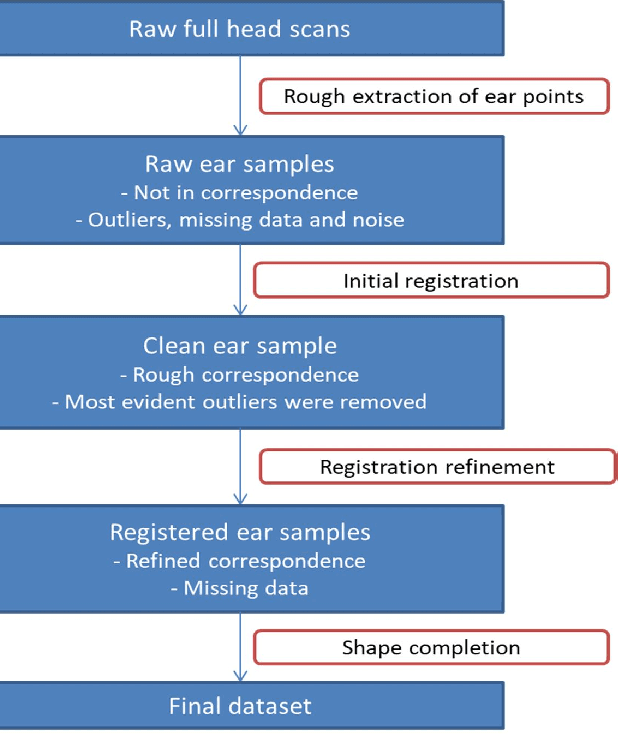
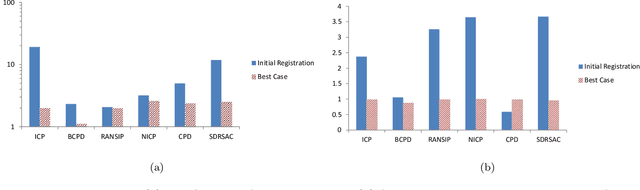
RANSIP : From noisy point clouds to complete ear models, unsupervised
Aug 22, 2020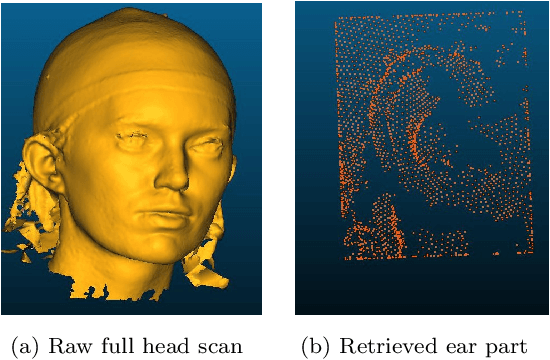

Ears are a particularly difficult region of the human face to model, not only due to the non-rigid deformations existing between shapes but also to the challenges in processing the retrieved data. The first step towards obtaining a good model is to have complete scans in correspondence, but these usually present a higher amount of occlusions, noise and outliers when compared to most face regions, thus requiring a specific procedure. Therefore, we propose a complete pipeline taking as input unordered 3D point clouds with the aforementioned problems, and producing as output a dataset in correspondence, with completion of the missing data. We provide a comparison of several state-of-the-art registration methods and propose a new approach for one of the steps of the pipeline, with better performance for our data.