 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultitask Reinforcement Learning for Quadcopter Attitude Stabilization and Tracking using Graph Policy
Mar 11, 2025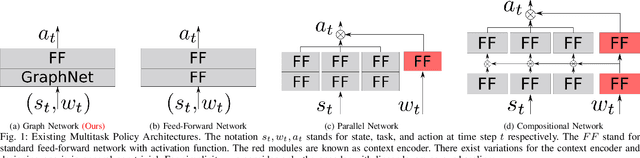
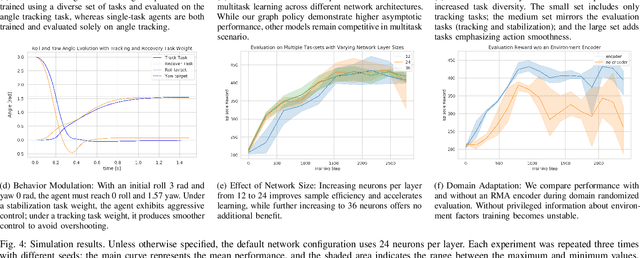
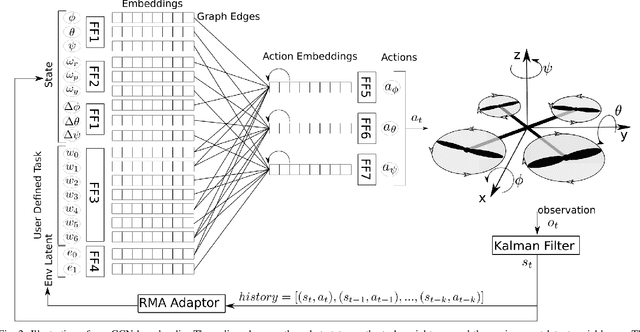
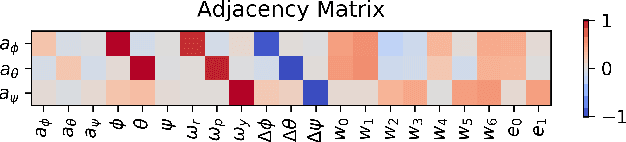
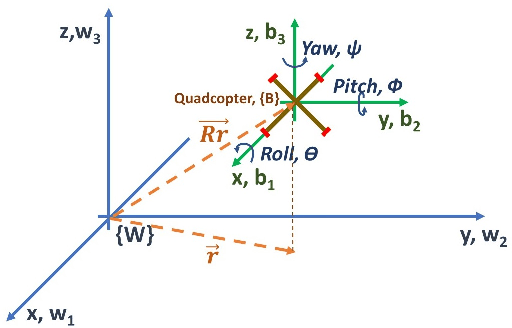
Quadcopter attitude control involves two tasks: smooth attitude tracking and aggressive stabilization from arbitrary states. Although both can be formulated as tracking problems, their distinct state spaces and control strategies complicate a unified reward function. We propose a multitask deep reinforcement learning framework that leverages parallel simulation with IsaacGym and a Graph Convolutional Network (GCN) policy to address both tasks effectively. Our multitask Soft Actor-Critic (SAC) approach achieves faster, more reliable learning and higher sample efficiency than single-task methods. We validate its real-world applicability by deploying the learned policy - a compact two-layer network with 24 neurons per layer - on a Pixhawk flight controller, achieving 400 Hz control without extra computational resources. We provide our code at https://github.com/robot-perception-group/GraphMTSAC\_UAV/.
Frontier Shepherding: A Bio-Mimetic Multi-robot Framework for Large-Scale Exploration
Sep 17, 2024
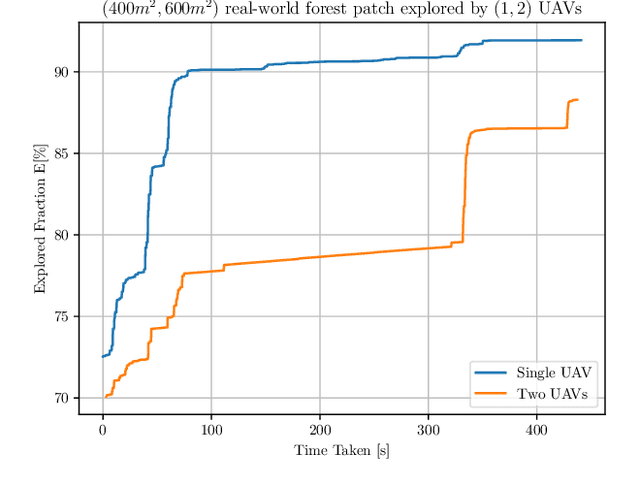
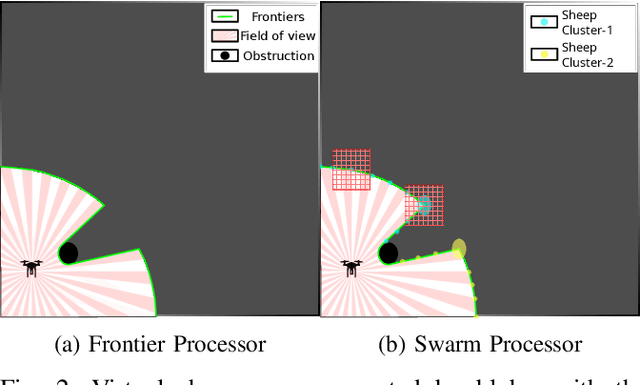
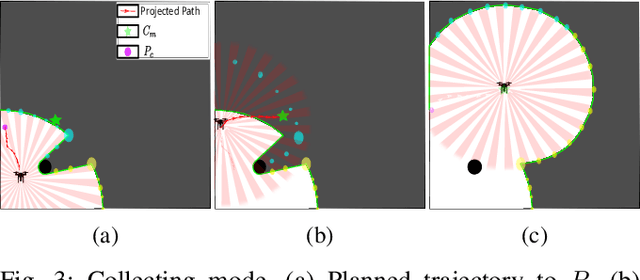
Efficient exploration of large-scale environments remains a critical challenge in robotics, with applications ranging from environmental monitoring to search and rescue operations. This article proposes a bio-mimetic multi-robot framework, \textit{Frontier Shepherding (FroShe)}, for large-scale exploration. The presented bio-inspired framework heuristically models frontier exploration similar to the shepherding behavior of herding dogs. This is achieved by modeling frontiers as a sheep swarm reacting to robots modeled as shepherding dogs. The framework is robust across varying environment sizes and obstacle densities and can be easily deployed across multiple agents. Simulation results showcase that the proposed method consistently performed irrespective of the simulated environment's varying sizes and obstacle densities. With the increase in the number of agents, the proposed method outperforms other state-of-the-art exploration methods, with an average improvement of $20\%$ with the next-best approach(for $3$ UAVs). The proposed technique was implemented and tested in a single and dual drone scenario in a real-world forest-like environment.
BogieCopter: A Multi-Modal Aerial-Ground Vehicle for Long-Endurance Inspection Applications
Mar 03, 2023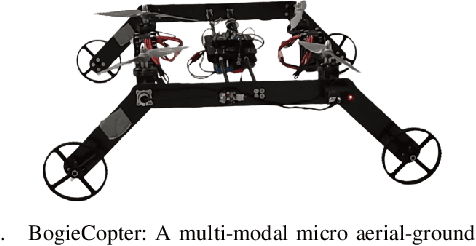
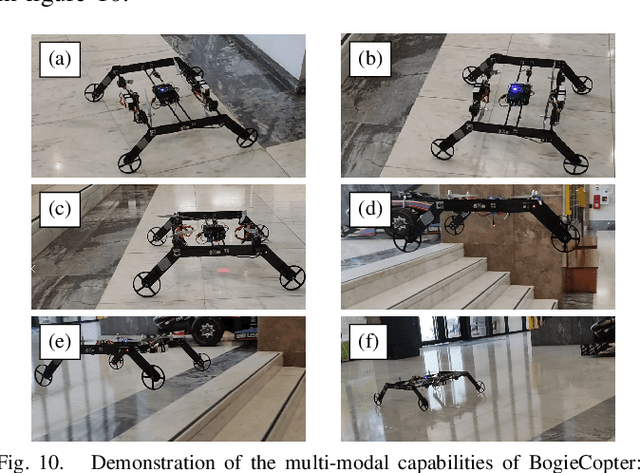
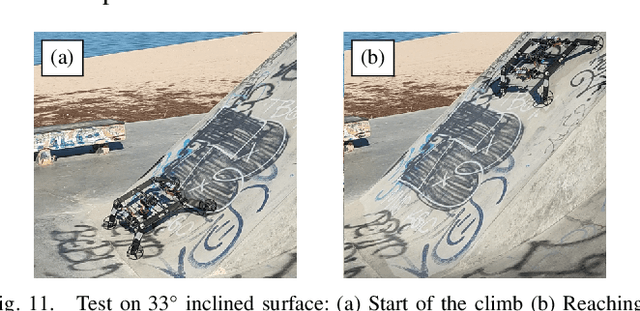
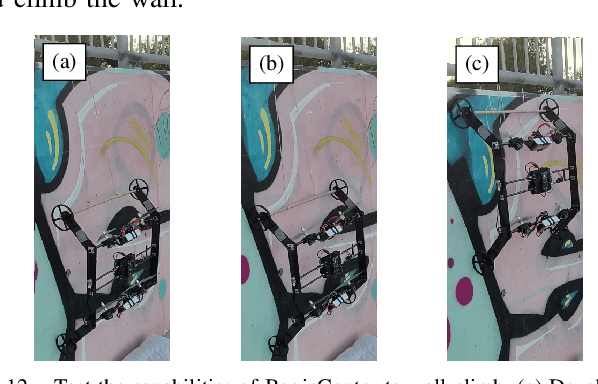
The use of Micro Aerial Vehicles (MAVs) for inspection and surveillance missions has proved to be extremely useful, however, their usability is negatively impacted by the large power requirements and the limited operating time. This work describes the design and development of a novel hybrid aerial-ground vehicle, enabling multi-modal mobility and long operating time, suitable for long-endurance inspection and monitoring applications. The design consists of a MAV with two tiltable axles and four independent passive wheels, allowing it to fly, approach, land and move on flat and inclined surfaces, while using the same set of actuators for all modes of locomotion. In comparison to existing multi-modal designs with passive wheels, the proposed design enables a higher ground locomotion efficiency, provides a higher payload capacity, and presents one of the lowest mass increases due to the ground actuation mechanism. The vehicle's performance is evaluated through a series of real experiments, demonstrating its flying, ground locomotion and wall-climbing capabilities, and the energy consumption for all modes of locomotion is evaluated.
Tension Estimation and Localization for a Tethered Micro Aerial Robot
Feb 07, 2023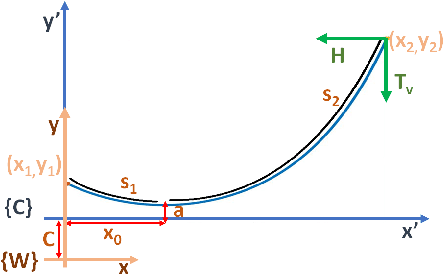
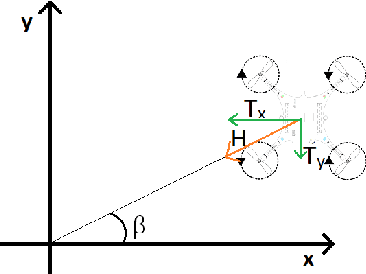
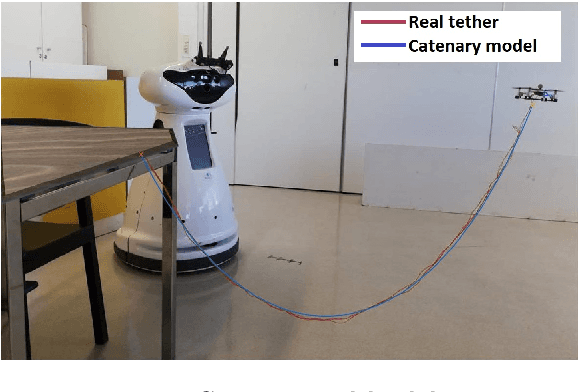
This work focuses on the study of tethered fights of a micro quadcopter, with the aim of supplying continuous power to a small-sized aerial robot. Multiple features for facilitating the interaction between a tethered micro quadcopter and a ground base are described in this paper. Firstly, a tether model based on the catenary curve is presented that describes a quadcopter tethered to a point in space. Furthermore, a method capable of estimating the tension applied to the quadcopter, based only on the inertial information from the IMU sensors and the motor thrusts, is presented. Finally, a novel method for localizing the quadcopter by exploiting the tension imposed by the tether and the shape of the tether is described. The proposed methods are evaluated both in simulation and in real world prototype.
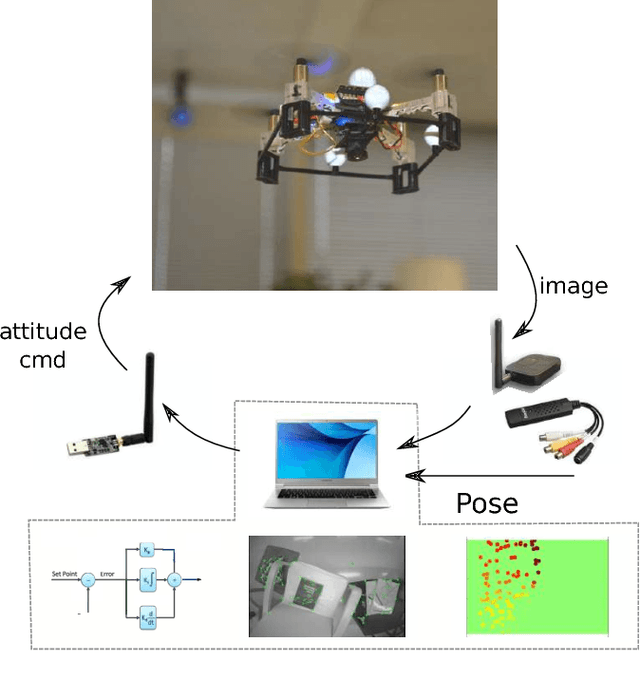
Low-level Active Visual Navigation: Increasing robustness of vision-based localization using potential fields
Mar 23, 2018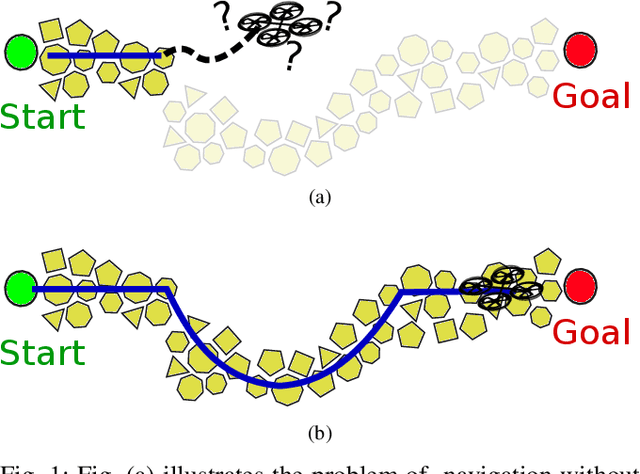
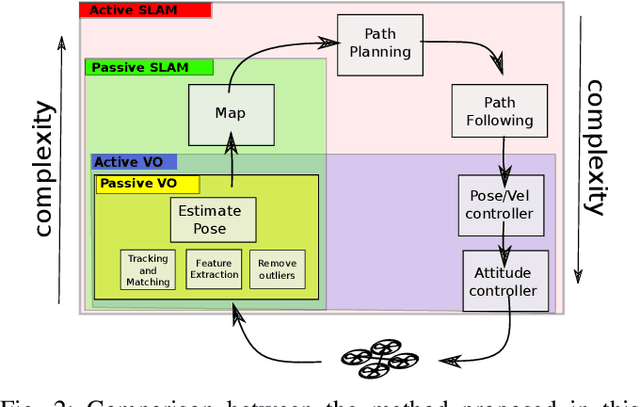
This paper proposes a low-level visual navigation algorithm to improve visual localization of a mobile robot. The algorithm, based on artificial potential fields, associates each feature in the current image frame with an attractive or neutral potential energy, with the objective of generating a control action that drives the vehicle towards the goal, while still favoring feature rich areas within a local scope, thus improving the localization performance. One key property of the proposed method is that it does not rely on mapping, and therefore it is a lightweight solution that can be deployed on miniaturized aerial robots, in which memory and computational power are major constraints. Simulations and real experimental results using a mini quadrotor equipped with a downward looking camera demonstrate that the proposed method can effectively drive the vehicle to a designated goal through a path that prevents localization failure.
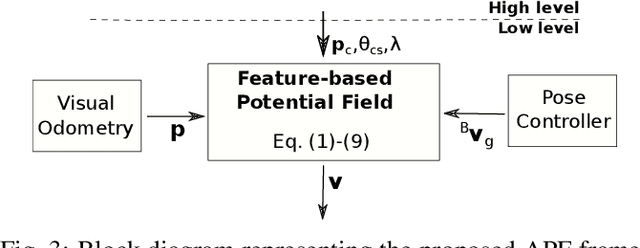
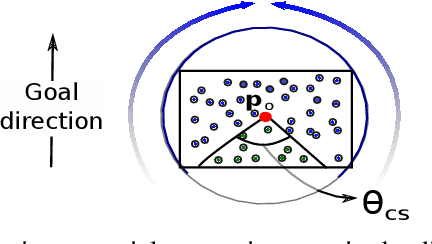
Feature Based Potential Field for Low-level Active Visual Navigation
Sep 14, 2017
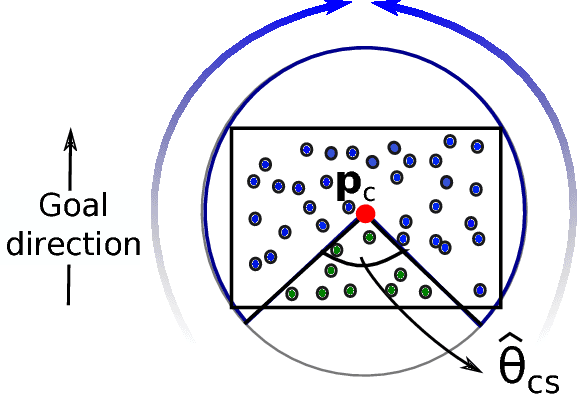
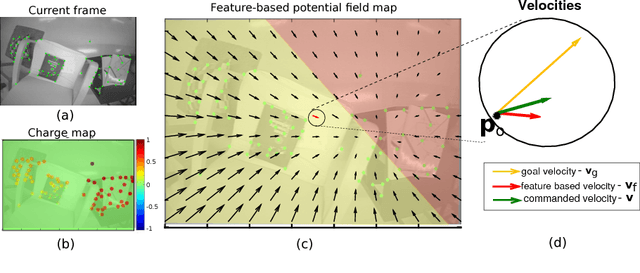
This paper proposes a novel solution for improving visual localization in an active fashion. The solution, based on artificial potential field, associates each feature in the current image frame with an attractive or neutral potential energy. The resultant action drives the vehicle towards the goal, while still favoring feature rich areas. Experimental results with a mini quadrotor equipped with a downward looking camera assess the performance of the proposed method.