 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Ground Navigation in Highly Constrained Spaces: Lessons learned from The 2nd BARN Challenge at ICRA 2023
Aug 06, 2023The 2nd BARN (Benchmark Autonomous Robot Navigation) Challenge took place at the 2023 IEEE International Conference on Robotics and Automation (ICRA 2023) in London, UK and continued to evaluate the performance of state-of-the-art autonomous ground navigation systems in highly constrained environments. Compared to The 1st BARN Challenge at ICRA 2022 in Philadelphia, the competition has grown significantly in size, doubling the numbers of participants in both the simulation qualifier and physical finals: Ten teams from all over the world participated in the qualifying simulation competition, six of which were invited to compete with each other in three physical obstacle courses at the conference center in London, and three teams won the challenge by navigating a Clearpath Jackal robot from a predefined start to a goal with the shortest amount of time without colliding with any obstacle. The competition results, compared to last year, suggest that the teams are making progress toward more robust and efficient ground navigation systems that work out-of-the-box in many obstacle environments. However, a significant amount of fine-tuning is still needed onsite to cater to different difficult navigation scenarios. Furthermore, challenges still remain for many teams when facing extremely cluttered obstacles and increasing navigation speed. In this article, we discuss the challenge, the approaches used by the three winning teams, and lessons learned to direct future research.
Active Depth Estimation: Stability Analysis and its Applications
Mar 16, 2020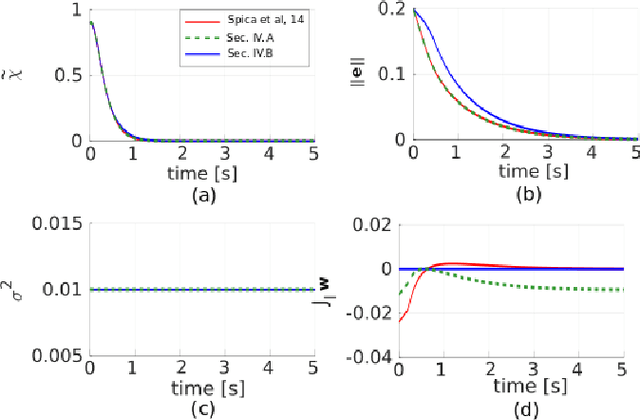
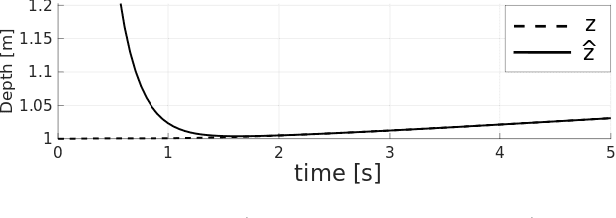
Recovering the 3D structure of the surrounding environment is an essential task in any vision-controlled Structure-from-Motion (SfM) scheme. This paper focuses on the theoretical properties of the SfM, known as the incremental active depth estimation. The term incremental stands for estimating the 3D structure of the scene over a chronological sequence of image frames. Active means that the camera actuation is such that it improves estimation performance. Starting from a known depth estimation filter, this paper presents the stability analysis of the filter in terms of the control inputs of the camera. By analyzing the convergence of the estimator using the Lyapunov theory, we relax the constraints on the projection of the 3D point in the image plane when compared to previous results. Nonetheless, our method is capable of dealing with the cameras' limited field-of-view constraints. The main results are validated through experiments with simulated data.
* 7 pages, 3 figures, conference
A Framework for Depth Estimation and Relative Localization of Ground Robots using Computer Vision
Aug 01, 2019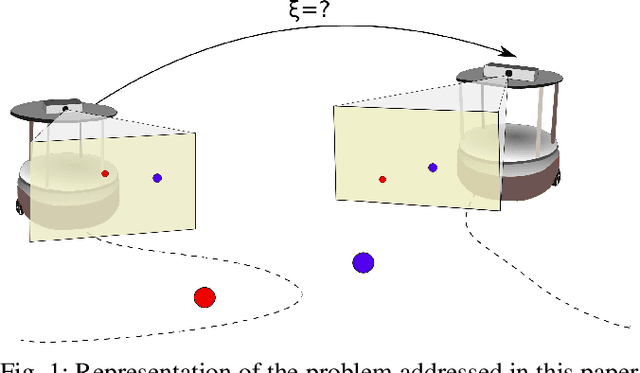
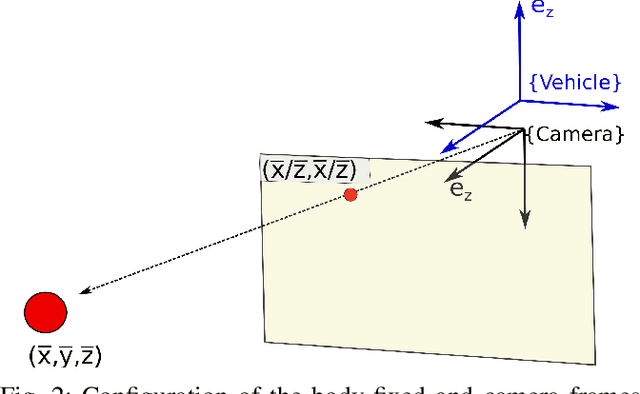
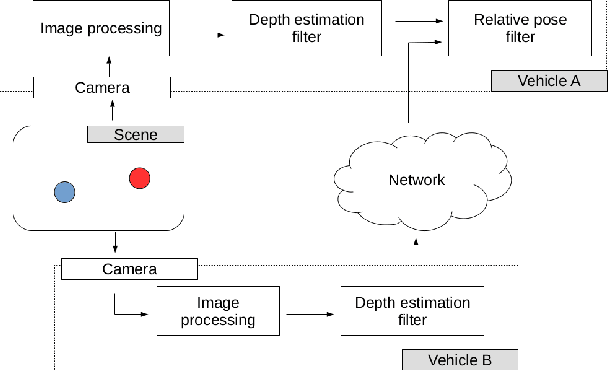
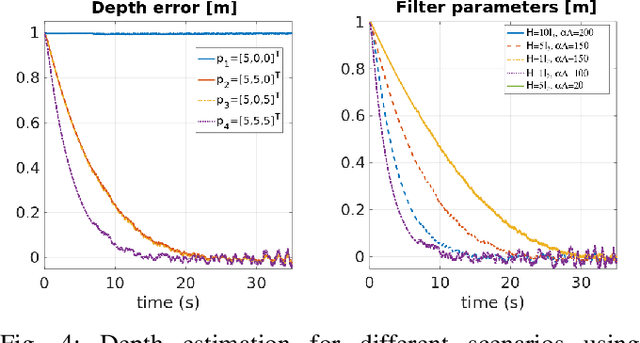
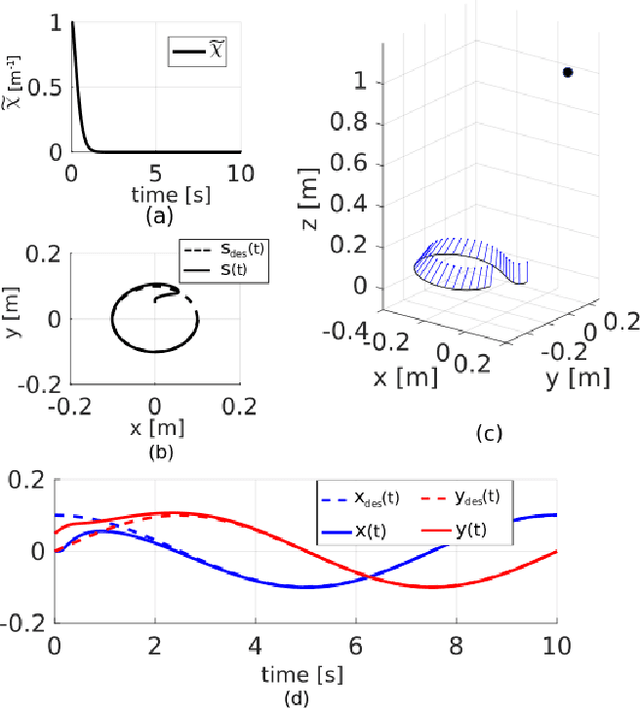
The 3D depth estimation and relative pose estimation problem within a decentralized architecture is a challenging problem that arises in missions that require coordination among multiple vision-controlled robots. The depth estimation problem aims at recovering the 3D information of the environment. The relative localization problem consists of estimating the relative pose between two robots, by sensing each other's pose or sharing information about the perceived environment. Most solutions for these problems use a set of discrete data without taking into account the chronological order of the events. This paper builds on recent results on continuous estimation to propose a framework that estimates the depth and relative pose between two non-holonomic vehicles. The basic idea consists in estimating the depth of the points by explicitly considering the dynamics of the camera mounted on a ground robot, and feeding the estimates of 3D points observed by both cameras in a filter that computes the relative pose between the robots. We evaluate the convergence for a set of simulated scenarios and show experimental results validating the proposed framework.
* 6 pages, 7 figures, conference
Low-level Active Visual Navigation: Increasing robustness of vision-based localization using potential fields
Mar 23, 2018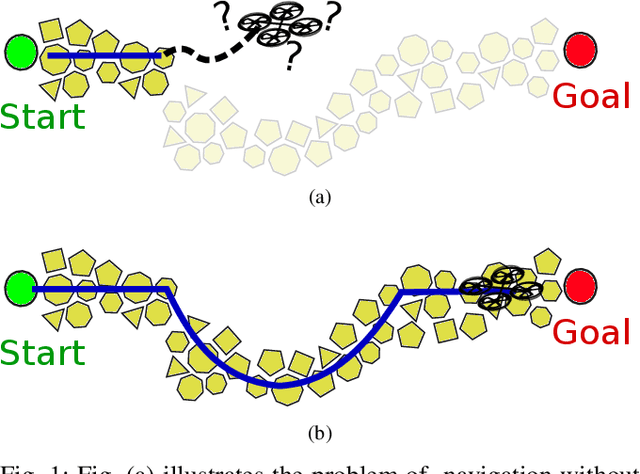
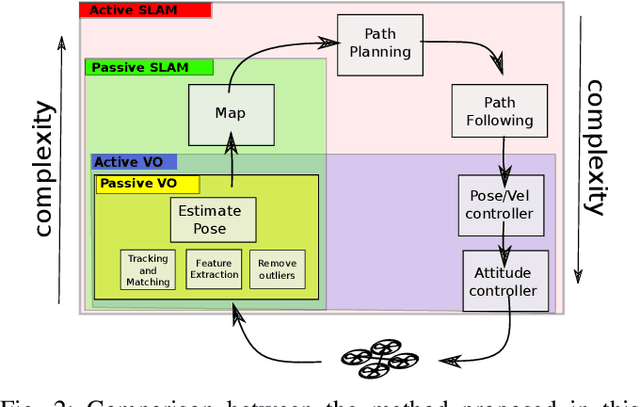
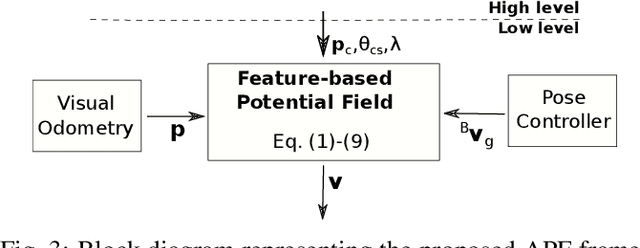
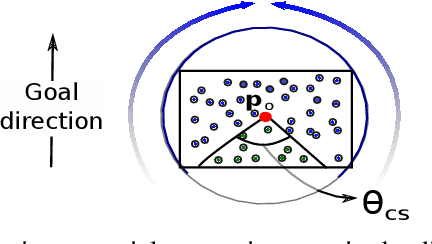
This paper proposes a low-level visual navigation algorithm to improve visual localization of a mobile robot. The algorithm, based on artificial potential fields, associates each feature in the current image frame with an attractive or neutral potential energy, with the objective of generating a control action that drives the vehicle towards the goal, while still favoring feature rich areas within a local scope, thus improving the localization performance. One key property of the proposed method is that it does not rely on mapping, and therefore it is a lightweight solution that can be deployed on miniaturized aerial robots, in which memory and computational power are major constraints. Simulations and real experimental results using a mini quadrotor equipped with a downward looking camera demonstrate that the proposed method can effectively drive the vehicle to a designated goal through a path that prevents localization failure.