 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe GREENBOT dataset: Multimodal mobile robotic dataset for a typical Mediterranean greenhouse
Feb 01, 2024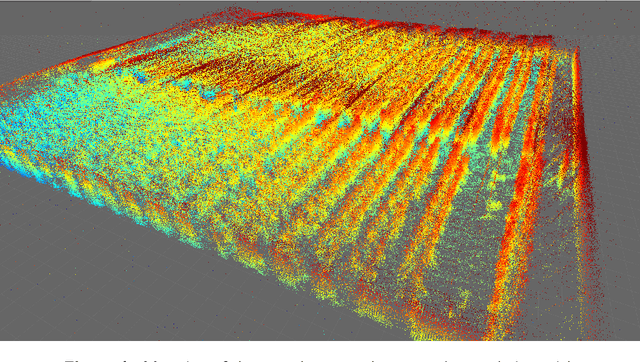
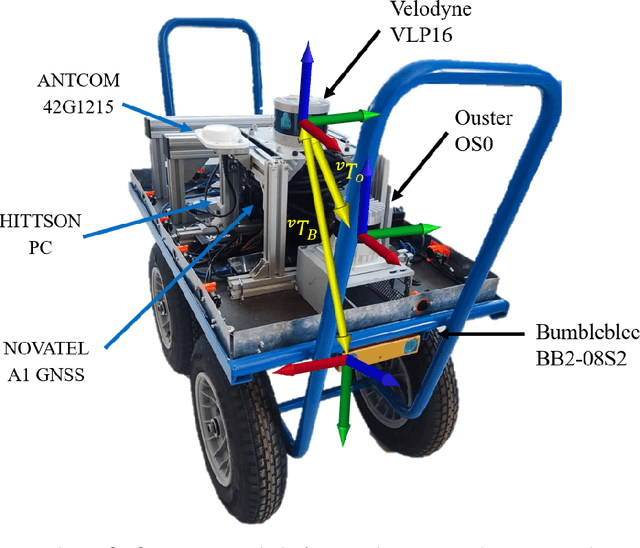
This paper introduces an innovative dataset specifically crafted for challenging agricultural settings (a greenhouse), where achieving precise localization is of paramount importance. The dataset was gathered using a mobile platform equipped with a set of sensors typically used in mobile robots, as it was moved through all the corridors of a typical Mediterranean greenhouse featuring tomato crop. This dataset presents a unique opportunity for constructing detailed 3D models of plants in such indoor-like space, with potential applications such as robotized spraying. For the first time to the best knowledge of authors, a dataset suitable to put at test Simultaneous Localization and Mapping (SLAM) methods is presented in a greenhouse environment, which poses unique challenges. The suitability of the dataset for such goal is assessed by presenting SLAM results with state-of-the-art algorithms. The dataset is available online in \url{https://arm.ual.es/arm-group/dataset-greenhouse-2024/}.
Benchmarking Particle Filter Algorithms for Efficient Velodyne-Based Vehicle Localization
Jan 16, 2024



Keeping a vehicle well-localized within a prebuilt-map is at the core of any autonomous vehicle navigation system. In this work, we show that both standard SIR sampling and rejection-based optimal sampling are suitable for efficient (10 to 20 ms) real-time pose tracking without feature detection that is using raw point clouds from a 3D LiDAR. Motivated by the large amount of information captured by these sensors, we perform a systematic statistical analysis of how many points are actually required to reach an optimal ratio between efficiency and positioning accuracy. Furthermore, initialization from adverse conditions, e.g., poor GPS signal in urban canyons, we also identify the optimal particle filter settings required to ensure convergence. Our findings include that a decimation factor between 100 and 200 on incoming point clouds provides a large savings in computational cost with a negligible loss in localization accuracy for a VLP-16 scanner. Furthermore, an initial density of $\sim$2 particles/m$^2$ is required to achieve 100% convergence success for large-scale ($\sim$100,000 m$^2$), outdoor global localization without any additional hint from GPS or magnetic field sensors. All implementations have been released as open-source software.
Autonomous Ground Navigation in Highly Constrained Spaces: Lessons learned from The 2nd BARN Challenge at ICRA 2023
Aug 06, 2023The 2nd BARN (Benchmark Autonomous Robot Navigation) Challenge took place at the 2023 IEEE International Conference on Robotics and Automation (ICRA 2023) in London, UK and continued to evaluate the performance of state-of-the-art autonomous ground navigation systems in highly constrained environments. Compared to The 1st BARN Challenge at ICRA 2022 in Philadelphia, the competition has grown significantly in size, doubling the numbers of participants in both the simulation qualifier and physical finals: Ten teams from all over the world participated in the qualifying simulation competition, six of which were invited to compete with each other in three physical obstacle courses at the conference center in London, and three teams won the challenge by navigating a Clearpath Jackal robot from a predefined start to a goal with the shortest amount of time without colliding with any obstacle. The competition results, compared to last year, suggest that the teams are making progress toward more robust and efficient ground navigation systems that work out-of-the-box in many obstacle environments. However, a significant amount of fine-tuning is still needed onsite to cater to different difficult navigation scenarios. Furthermore, challenges still remain for many teams when facing extremely cluttered obstacles and increasing navigation speed. In this article, we discuss the challenge, the approaches used by the three winning teams, and lessons learned to direct future research.
OLAE-ICP: Robust and fast alignment of geometric features with the optimal linear attitude estimator
Jun 25, 2019


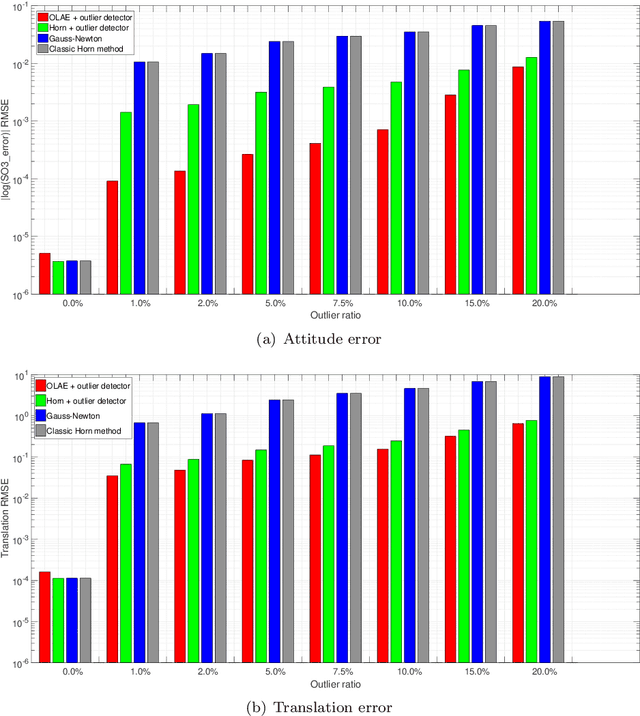
The problems of point-cloud registration and attitude estimation from vector observations (Wahba's problem) have widespread applications in computer vision and mobile robotics. This work introduces a simple approach for integrating sets of geometric feature observations (points, lines, and planes) in such a way that any solution to either point-cloud registration or to Wahba's problem can be used to find the SE(3) transformation between the two sets that minimizes the corresponding cost function. We compare the performance of three solutions: classic Horn's optimal quaternion method, Optimal Linear Attitude Estimator (OLAE) that efficiently recovers the optimal Gibbs-Rodrigues vector solving a small linear system, and an iterative non-linear Gauss-Newton solver. Special care is given to explain how to overcome the Gibbs vector singularity for OLAE by using the method of sequential rotations. Gross outliers in point-to-point correspondences can be discarded by means of detecting transformation scale mismatches. The approach also allows the introduction of per-primitive relative weights, including an optional robust loss function that is applicable only if an initial guess for the solution is known in advance. Experiments are presented to evaluate how the three solutions tolerate noise in the input data for different kinds of geometric primitives. Finally, experiments with real datasets validate the suitability of the optimal alignment algorithm as the core of an Iterative Closest Point/Primitive (ICP) algorithm. An open-source implementation of all the described algorithms is provided in https://github.com/MOLAorg/mp2p_icp