 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGreenSeg: Ground Segmentation Algorithm for Agricultural Robots in Mediterranean Greenhouses using RGB-D Point Clouds
May 24, 2026Greenhouse agriculture in the Mediterranean region faces significant automation challenges due to its unique structural and environmental constraints. These environments are characterized by extremely narrow aisles, heterogeneous terrains ranging from concrete to tilled soil and severe optical interference caused by polyethylene covers, which induce specular reflections and "ghost points" in depth sensors. While autonomous navigation is essential for digitizing agricultural tasks, traditional solutions often rely on expensive 3D LiDAR systems that are economically unscalable for most facilities. To address this, this paper presents GreenSeg, a robust perception framework for autonomous navigation using RGB-D sensing. The proposed method introduces a dual-layer validation strategy: a robust global plane fitting combined with a surface curvature filter for terrain adaptability, and a seed-point-based Region Growing constraint to ensure the spatial continuity of the navigable plane. Experimental validation was conducted using the AGRICOBIOT I platform across four diurnal scenarios with varying solar elevations. The results show that GreenSeg consistently outperforms benchmark segmentation methods, achieving peak improvements of 11.58% in mean Recall and 19.24% in mIoU during critical rotational maneuvers at the end of corridors. These findings confirm that the proposed algorithm enables stable and safe autonomous navigation in unstructured, dynamic agricultural environments that are subject to budget constraints and sensitive to lighting conditions.
A ROS2 Benchmarking Framework for Hierarchical Control Strategies in Mobile Robots for Mediterranean Greenhouses
Feb 16, 2026Mobile robots operating in agroindustrial environments, such as Mediterranean greenhouses, are subject to challenging conditions, including uneven terrain, variable friction, payload changes, and terrain slopes, all of which significantly affect control performance and stability. Despite the increasing adoption of robotic platforms in agriculture, the lack of standardized, reproducible benchmarks impedes fair comparisons and systematic evaluations of control strategies under realistic operating conditions. This paper presents a comprehensive benchmarking framework for evaluating mobile robot controllers in greenhouse environments. The proposed framework integrates an accurate three dimensional model of the environment, a physics based simulator, and a hierarchical control architecture comprising low, mid, and high level control layers. Three benchmark categories are defined to enable modular assessment, ranging from actuator level control to full autonomous navigation. Additionally, three disturbance scenarios payload variation, terrain type, and slope are explicitly modeled to replicate real world agricultural conditions. To ensure objective and reproducible evaluation, standardized performance metrics are introduced, including the Squared Absolute Error (SAE), the Squared Control Input (SCI), and composite performance indices. Statistical analysis based on repeated trials is employed to mitigate the influence of sensor noise and environmental variability. The framework is further enhanced by a plugin based architecture that facilitates seamless integration of user defined controllers and planners. The proposed benchmark provides a robust and extensible tool for the quantitative comparison of classical, predictive, and planning based control strategies in realistic conditions, bridging the gap between simulation based analysis and real world agroindustrial applications.
The GREENBOT dataset: Multimodal mobile robotic dataset for a typical Mediterranean greenhouse
Feb 01, 2024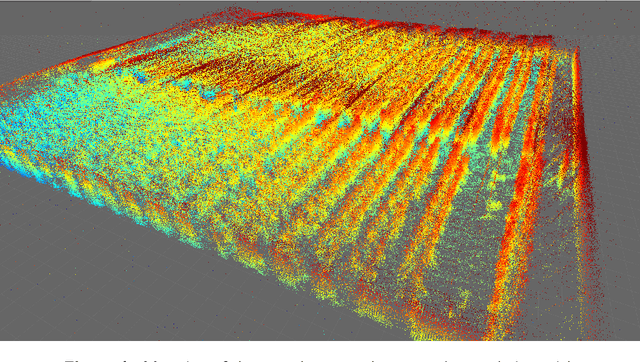
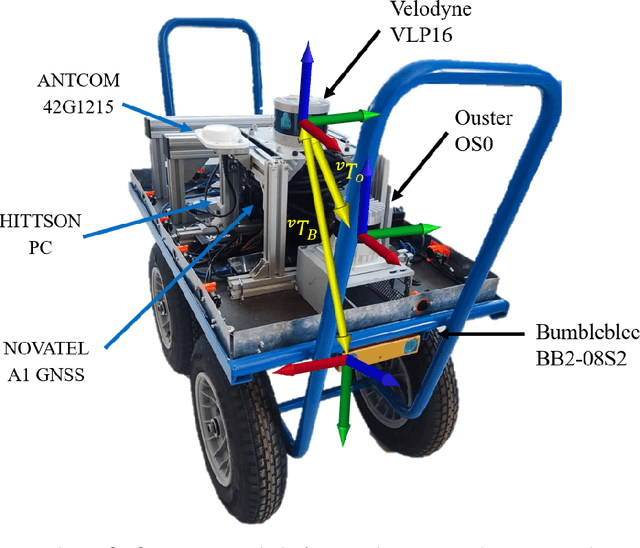
This paper introduces an innovative dataset specifically crafted for challenging agricultural settings (a greenhouse), where achieving precise localization is of paramount importance. The dataset was gathered using a mobile platform equipped with a set of sensors typically used in mobile robots, as it was moved through all the corridors of a typical Mediterranean greenhouse featuring tomato crop. This dataset presents a unique opportunity for constructing detailed 3D models of plants in such indoor-like space, with potential applications such as robotized spraying. For the first time to the best knowledge of authors, a dataset suitable to put at test Simultaneous Localization and Mapping (SLAM) methods is presented in a greenhouse environment, which poses unique challenges. The suitability of the dataset for such goal is assessed by presenting SLAM results with state-of-the-art algorithms. The dataset is available online in \url{https://arm.ual.es/arm-group/dataset-greenhouse-2024/}.
MultiVehicle Simulator (MVSim): lightweight dynamics simulator for multiagents and mobile robotics research
Feb 21, 2023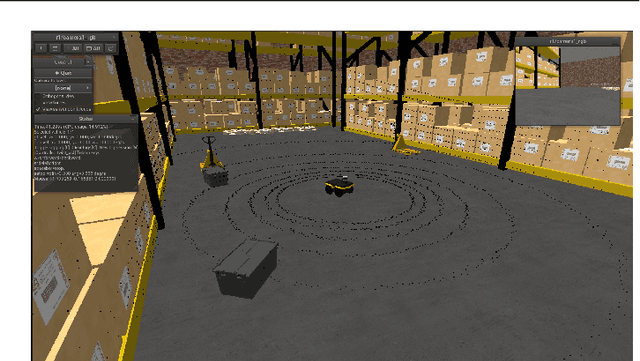
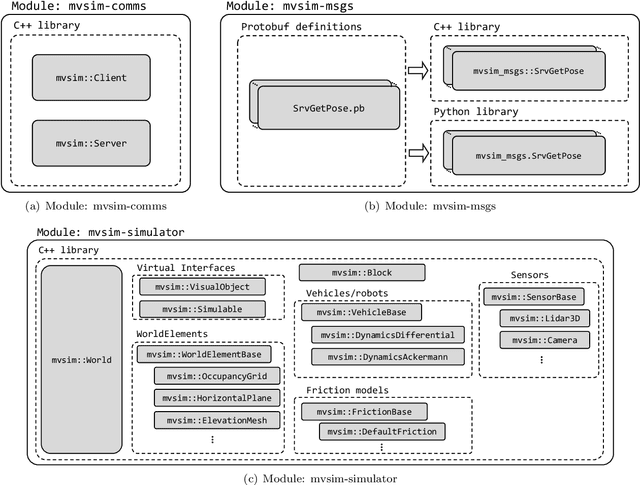
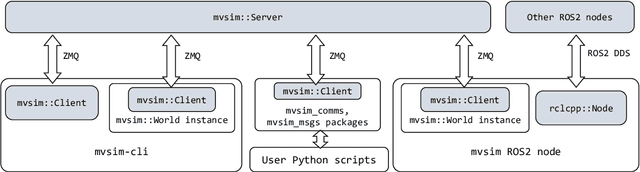
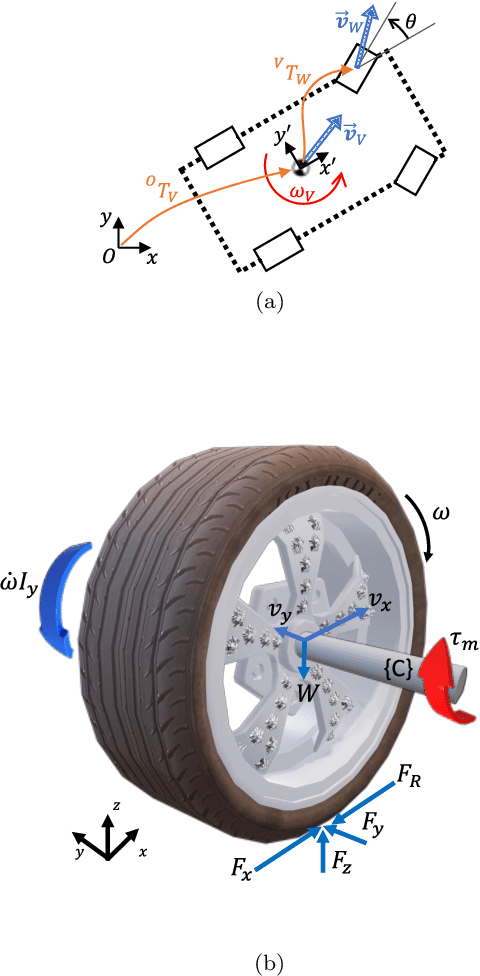
Development of applications related to closed-loop control requires either testing on the field or on a realistic simulator, with the latter being more convenient, inexpensive, safe, and leading to shorter development cycles. To address that need, the present work introduces MVSim, a simulator for multiple vehicles or robots capable of running dozens of agents in simple scenarios, or a handful of them in complex scenarios. MVSim employs realistic physics-grounded friction models for tire-ground interaction, and aims at accurate and GPU-accelerated simulation of most common modern sensors employed in mobile robotics and autonomous vehicle research, such as depth and RGB cameras, or 2D and 3D LiDAR scanners. All depth-related sensors are able to accurately measure distances to 3D models provided by the user to define custom world elements. Efficient simulation is achieved by means of focusing on ground vehicles, which allows the use of a simplified 2D physics engine for body collisions while solving wheel-ground interaction forces separately. The core parts of the system are written in C++ for maximum efficiency, while Python, ROS 1, and ROS 2 wrappers are also offered for easy integration into user systems. A custom publish/subscribe protocol based on ZeroMQ (ZMQ) is defined to allow for multiprocess applications to access or modify a running simulation. This simulator enables and makes easier to do research and development on vehicular dynamics, autonomous navigation algorithms, and simultaneous localization and mapping (SLAM) methods.