 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLifetime-Aware Design of Item-Level Intelligence
Sep 09, 2025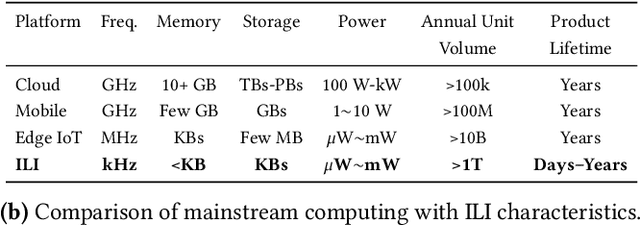
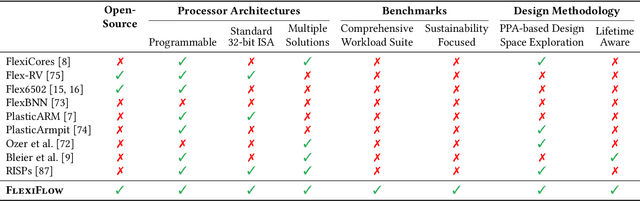

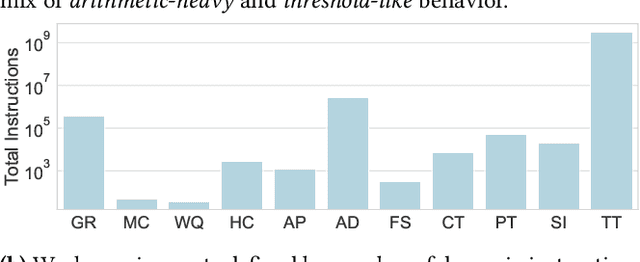
We present FlexiFlow, a lifetime-aware design framework for item-level intelligence (ILI) where computation is integrated directly into disposable products like food packaging and medical patches. Our framework leverages natively flexible electronics which offer significantly lower costs than silicon but are limited to kHz speeds and several thousands of gates. Our insight is that unlike traditional computing with more uniform deployment patterns, ILI applications exhibit 1000X variation in operational lifetime, fundamentally changing optimal architectural design decisions when considering trillion-item deployment scales. To enable holistic design and optimization, we model the trade-offs between embodied carbon footprint and operational carbon footprint based on application-specific lifetimes. The framework includes: (1) FlexiBench, a workload suite targeting sustainability applications from spoilage detection to health monitoring; (2) FlexiBits, area-optimized RISC-V cores with 1/4/8-bit datapaths achieving 2.65X to 3.50X better energy efficiency per workload execution; and (3) a carbon-aware model that selects optimal architectures based on deployment characteristics. We show that lifetime-aware microarchitectural design can reduce carbon footprint by 1.62X, while algorithmic decisions can reduce carbon footprint by 14.5X. We validate our approach through the first tape-out using a PDK for flexible electronics with fully open-source tools, achieving 30.9kHz operation. FlexiFlow enables exploration of computing at the Extreme Edge where conventional design methodologies must be reevaluated to account for new constraints and considerations.
The GREENBOT dataset: Multimodal mobile robotic dataset for a typical Mediterranean greenhouse
Feb 01, 2024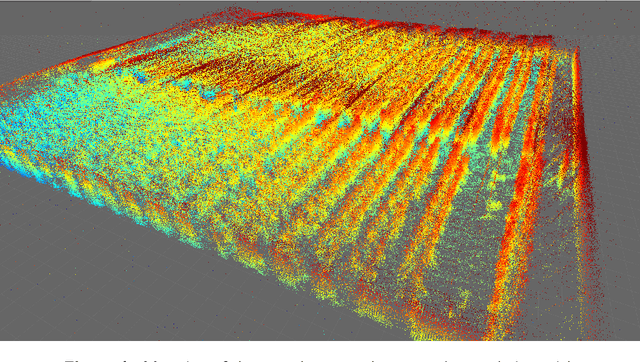
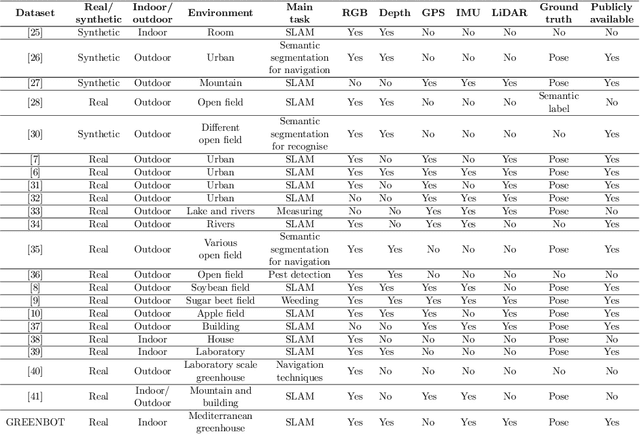
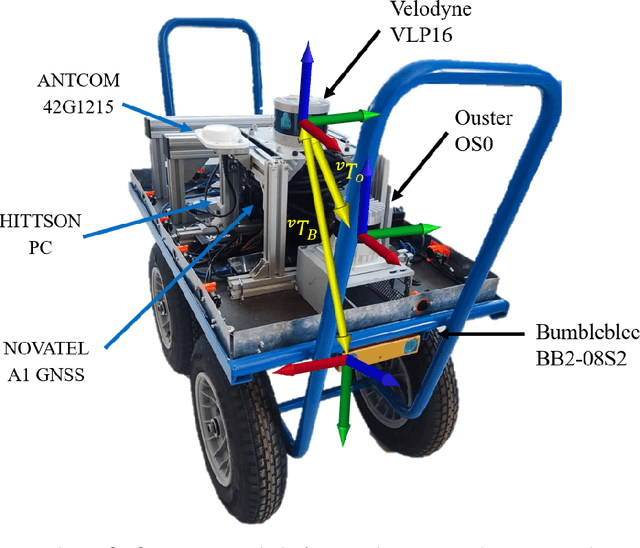
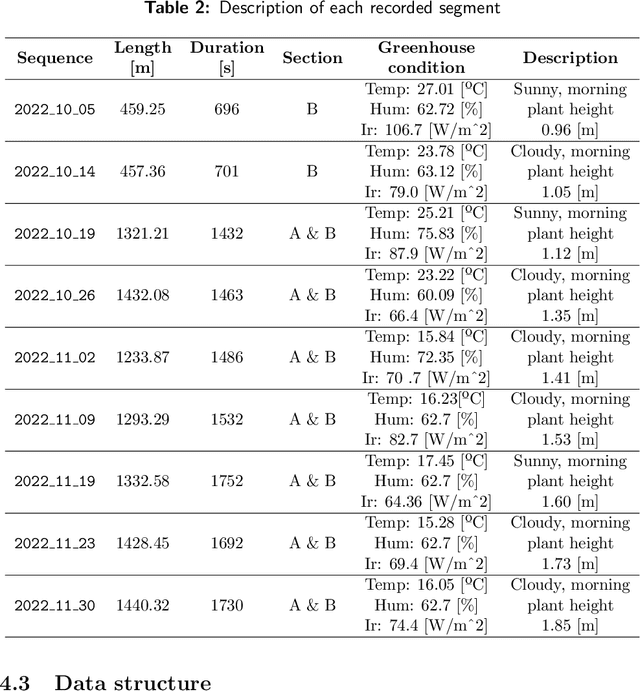
This paper introduces an innovative dataset specifically crafted for challenging agricultural settings (a greenhouse), where achieving precise localization is of paramount importance. The dataset was gathered using a mobile platform equipped with a set of sensors typically used in mobile robots, as it was moved through all the corridors of a typical Mediterranean greenhouse featuring tomato crop. This dataset presents a unique opportunity for constructing detailed 3D models of plants in such indoor-like space, with potential applications such as robotized spraying. For the first time to the best knowledge of authors, a dataset suitable to put at test Simultaneous Localization and Mapping (SLAM) methods is presented in a greenhouse environment, which poses unique challenges. The suitability of the dataset for such goal is assessed by presenting SLAM results with state-of-the-art algorithms. The dataset is available online in \url{https://arm.ual.es/arm-group/dataset-greenhouse-2024/}.
Benchmarking Particle Filter Algorithms for Efficient Velodyne-Based Vehicle Localization
Jan 16, 2024



Keeping a vehicle well-localized within a prebuilt-map is at the core of any autonomous vehicle navigation system. In this work, we show that both standard SIR sampling and rejection-based optimal sampling are suitable for efficient (10 to 20 ms) real-time pose tracking without feature detection that is using raw point clouds from a 3D LiDAR. Motivated by the large amount of information captured by these sensors, we perform a systematic statistical analysis of how many points are actually required to reach an optimal ratio between efficiency and positioning accuracy. Furthermore, initialization from adverse conditions, e.g., poor GPS signal in urban canyons, we also identify the optimal particle filter settings required to ensure convergence. Our findings include that a decimation factor between 100 and 200 on incoming point clouds provides a large savings in computational cost with a negligible loss in localization accuracy for a VLP-16 scanner. Furthermore, an initial density of $\sim$2 particles/m$^2$ is required to achieve 100% convergence success for large-scale ($\sim$100,000 m$^2$), outdoor global localization without any additional hint from GPS or magnetic field sensors. All implementations have been released as open-source software.