 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe GREENBOT dataset: Multimodal mobile robotic dataset for a typical Mediterranean greenhouse
Feb 01, 2024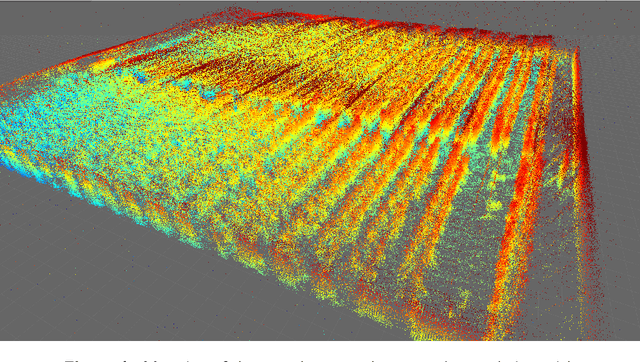
This paper introduces an innovative dataset specifically crafted for challenging agricultural settings (a greenhouse), where achieving precise localization is of paramount importance. The dataset was gathered using a mobile platform equipped with a set of sensors typically used in mobile robots, as it was moved through all the corridors of a typical Mediterranean greenhouse featuring tomato crop. This dataset presents a unique opportunity for constructing detailed 3D models of plants in such indoor-like space, with potential applications such as robotized spraying. For the first time to the best knowledge of authors, a dataset suitable to put at test Simultaneous Localization and Mapping (SLAM) methods is presented in a greenhouse environment, which poses unique challenges. The suitability of the dataset for such goal is assessed by presenting SLAM results with state-of-the-art algorithms. The dataset is available online in \url{https://arm.ual.es/arm-group/dataset-greenhouse-2024/}.