 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOLAE-ICP: Robust and fast alignment of geometric features with the optimal linear attitude estimator
Paper and Code



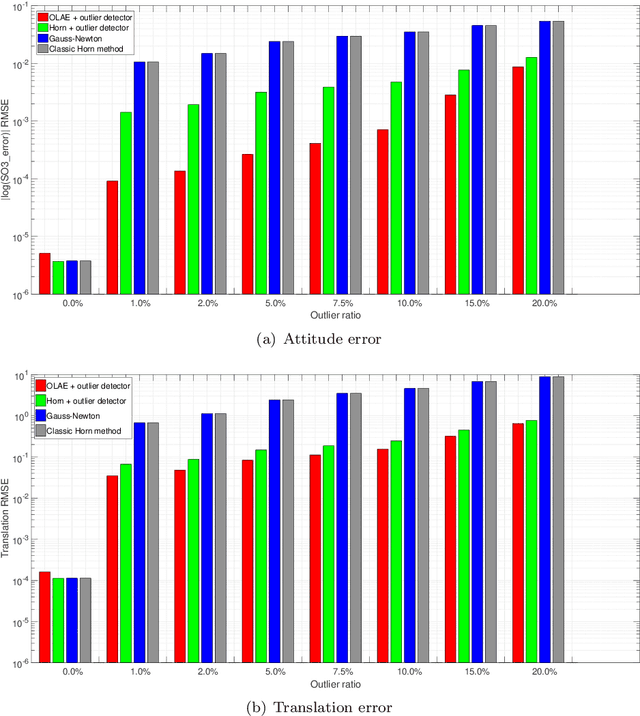
The problems of point-cloud registration and attitude estimation from vector observations (Wahba's problem) have widespread applications in computer vision and mobile robotics. This work introduces a simple approach for integrating sets of geometric feature observations (points, lines, and planes) in such a way that any solution to either point-cloud registration or to Wahba's problem can be used to find the SE(3) transformation between the two sets that minimizes the corresponding cost function. We compare the performance of three solutions: classic Horn's optimal quaternion method, Optimal Linear Attitude Estimator (OLAE) that efficiently recovers the optimal Gibbs-Rodrigues vector solving a small linear system, and an iterative non-linear Gauss-Newton solver. Special care is given to explain how to overcome the Gibbs vector singularity for OLAE by using the method of sequential rotations. Gross outliers in point-to-point correspondences can be discarded by means of detecting transformation scale mismatches. The approach also allows the introduction of per-primitive relative weights, including an optional robust loss function that is applicable only if an initial guess for the solution is known in advance. Experiments are presented to evaluate how the three solutions tolerate noise in the input data for different kinds of geometric primitives. Finally, experiments with real datasets validate the suitability of the optimal alignment algorithm as the core of an Iterative Closest Point/Primitive (ICP) algorithm. An open-source implementation of all the described algorithms is provided in https://github.com/MOLAorg/mp2p_icp