 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Depth Estimation: Stability Analysis and its Applications
Paper and Code
Mar 16, 2020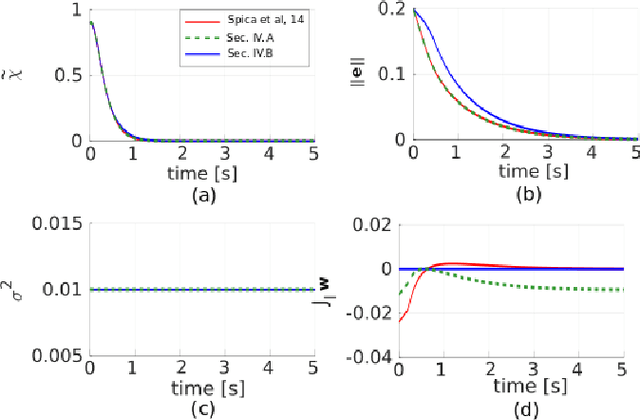
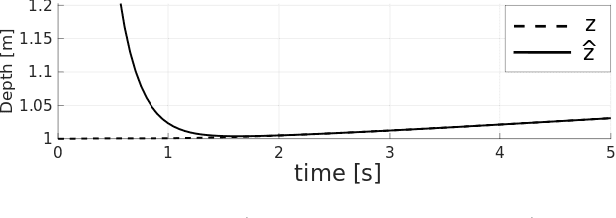
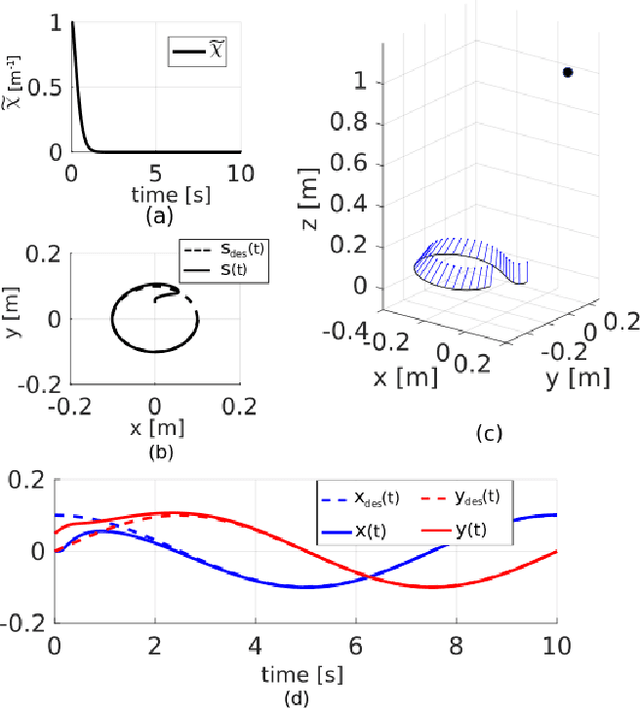
Recovering the 3D structure of the surrounding environment is an essential task in any vision-controlled Structure-from-Motion (SfM) scheme. This paper focuses on the theoretical properties of the SfM, known as the incremental active depth estimation. The term incremental stands for estimating the 3D structure of the scene over a chronological sequence of image frames. Active means that the camera actuation is such that it improves estimation performance. Starting from a known depth estimation filter, this paper presents the stability analysis of the filter in terms of the control inputs of the camera. By analyzing the convergence of the estimator using the Lyapunov theory, we relax the constraints on the projection of the 3D point in the image plane when compared to previous results. Nonetheless, our method is capable of dealing with the cameras' limited field-of-view constraints. The main results are validated through experiments with simulated data.