 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Framework for Depth Estimation and Relative Localization of Ground Robots using Computer Vision
Paper and Code
Aug 01, 2019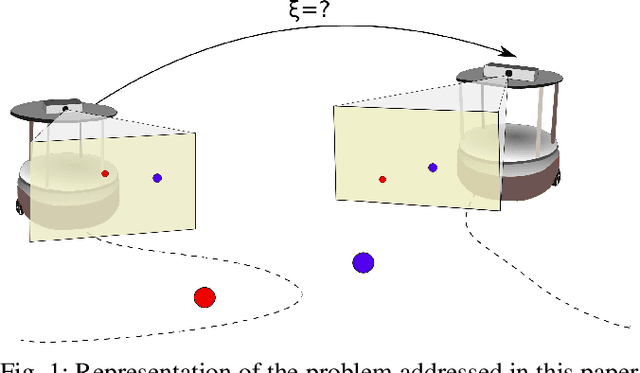
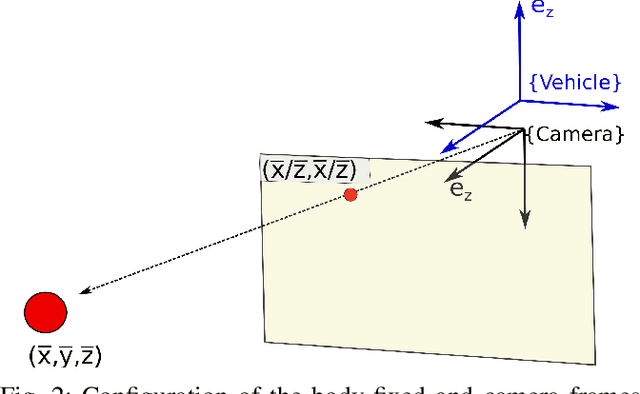
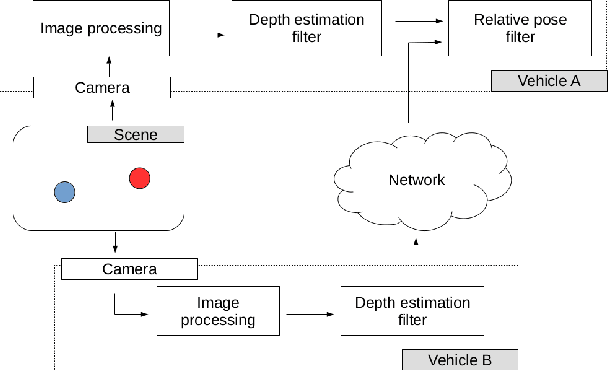
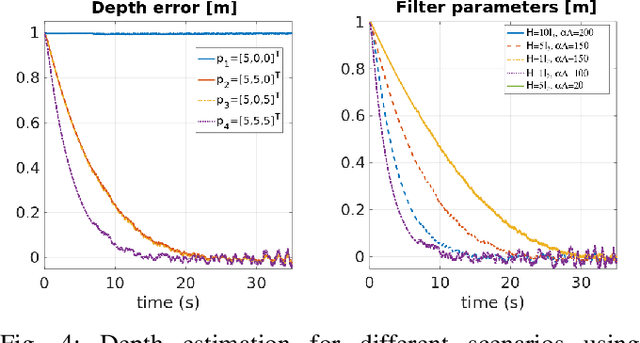
The 3D depth estimation and relative pose estimation problem within a decentralized architecture is a challenging problem that arises in missions that require coordination among multiple vision-controlled robots. The depth estimation problem aims at recovering the 3D information of the environment. The relative localization problem consists of estimating the relative pose between two robots, by sensing each other's pose or sharing information about the perceived environment. Most solutions for these problems use a set of discrete data without taking into account the chronological order of the events. This paper builds on recent results on continuous estimation to propose a framework that estimates the depth and relative pose between two non-holonomic vehicles. The basic idea consists in estimating the depth of the points by explicitly considering the dynamics of the camera mounted on a ground robot, and feeding the estimates of 3D points observed by both cameras in a filter that computes the relative pose between the robots. We evaluate the convergence for a set of simulated scenarios and show experimental results validating the proposed framework.