 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWestWorld: A Knowledge-Encoded Scalable Trajectory World Model for Diverse Robotic Systems
Mar 15, 2026Trajectory world models play a crucial role in robotic dynamics learning, planning, and control. While recent works have explored trajectory world models for diverse robotic systems, they struggle to scale to a large number of distinct system dynamics and overlook domain knowledge of physical structures. To address these limitations, we introduce WestWorld, a knoWledge-Encoded Scalable Trajectory World model for diverse robotic systems. To tackle the scalability challenge, we propose a novel system-aware Mixture-of-Experts (Sys-MoE) that dynamically combines and routes specialized experts for different robotic systems via a learnable system embedding. To further enhance zero-shot generalization, we incorporate domain knowledge of robot physical structures by introducing a structural embedding that aligns trajectory representations with morphological information. After pretraining on 89 complex environments spanning diverse morphologies across both simulation and real-world settings, WestWorld achieves significant improvements over competitive baselines in zero- and few-shot trajectory prediction. Additionally, it shows strong scalability across a wide range of robotic environments and significantly improves performance on downstream model-based control for different robots. Finally, we deploy our model on a real-world Unitree Go1, where it demonstrates stable locomotion performance (see our demo on the website: https://westworldrobot.github.io/). The code will be available upon publication.
GaussianFormer3D: Multi-Modal Gaussian-based Semantic Occupancy Prediction with 3D Deformable Attention
May 15, 2025
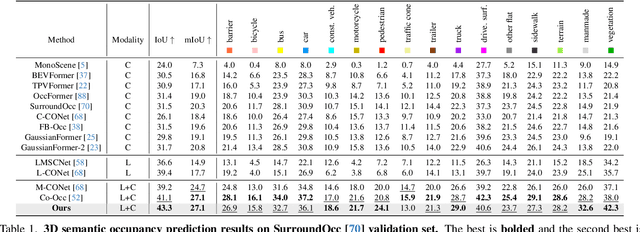
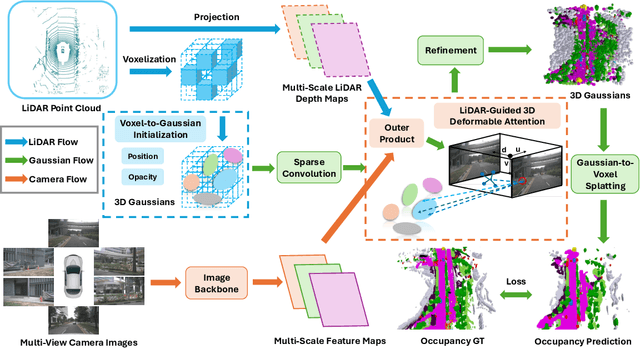
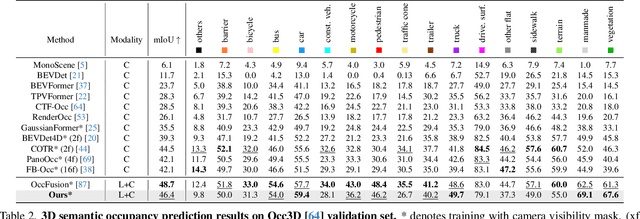
3D semantic occupancy prediction is critical for achieving safe and reliable autonomous driving. Compared to camera-only perception systems, multi-modal pipelines, especially LiDAR-camera fusion methods, can produce more accurate and detailed predictions. Although most existing works utilize a dense grid-based representation, in which the entire 3D space is uniformly divided into discrete voxels, the emergence of 3D Gaussians provides a compact and continuous object-centric representation. In this work, we propose a multi-modal Gaussian-based semantic occupancy prediction framework utilizing 3D deformable attention, named as GaussianFormer3D. We introduce a voxel-to-Gaussian initialization strategy to provide 3D Gaussians with geometry priors from LiDAR data, and design a LiDAR-guided 3D deformable attention mechanism for refining 3D Gaussians with LiDAR-camera fusion features in a lifted 3D space. We conducted extensive experiments on both on-road and off-road datasets, demonstrating that our GaussianFormer3D achieves high prediction accuracy that is comparable to state-of-the-art multi-modal fusion-based methods with reduced memory consumption and improved efficiency.
PoGDiff: Product-of-Gaussians Diffusion Models for Imbalanced Text-to-Image Generation
Feb 12, 2025Diffusion models have made significant advancements in recent years. However, their performance often deteriorates when trained or fine-tuned on imbalanced datasets. This degradation is largely due to the disproportionate representation of majority and minority data in image-text pairs. In this paper, we propose a general fine-tuning approach, dubbed PoGDiff, to address this challenge. Rather than directly minimizing the KL divergence between the predicted and ground-truth distributions, PoGDiff replaces the ground-truth distribution with a Product of Gaussians (PoG), which is constructed by combining the original ground-truth targets with the predicted distribution conditioned on a neighboring text embedding. Experiments on real-world datasets demonstrate that our method effectively addresses the imbalance problem in diffusion models, improving both generation accuracy and quality.
Morphological-Symmetry-Equivariant Heterogeneous Graph Neural Network for Robotic Dynamics Learning
Dec 02, 2024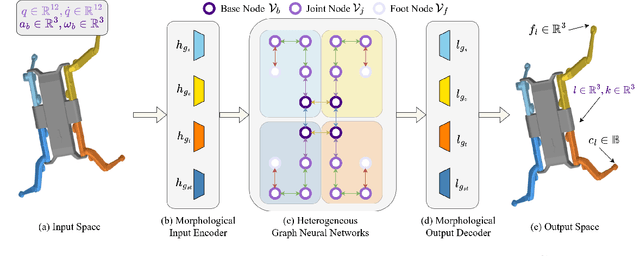
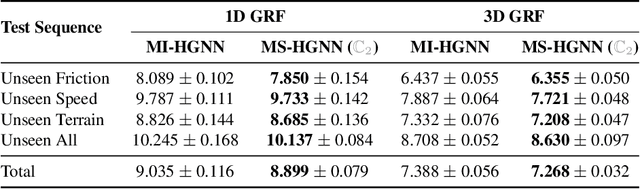
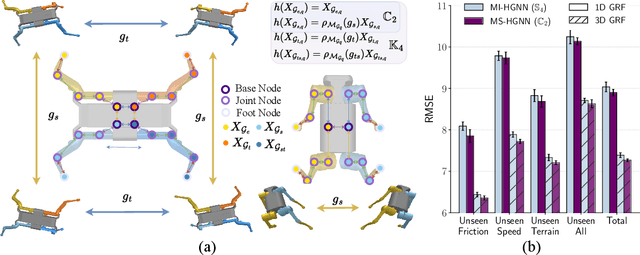

We present a morphological-symmetry-equivariant heterogeneous graph neural network, namely MS-HGNN, for robotic dynamics learning, that integrates robotic kinematic structures and morphological symmetries into a single graph network. These structural priors are embedded into the learning architecture as constraints, ensuring high generalizability, sample and model efficiency. The proposed MS-HGNN is a versatile and general architecture that is applicable to various multi-body dynamic systems and a wide range of dynamics learning problems. We formally prove the morphological-symmetry-equivariant property of our MS-HGNN and validate its effectiveness across multiple quadruped robot learning problems using both real-world and simulated data. Our code is made publicly available at https://github.com/lunarlab-gatech/MorphSym-HGNN/.
Asynchrony-Robust Collaborative Perception via Bird's Eye View Flow
Oct 09, 2023



Collaborative perception can substantially boost each agent's perception ability by facilitating communication among multiple agents. However, temporal asynchrony among agents is inevitable in the real world due to communication delays, interruptions, and clock misalignments. This issue causes information mismatch during multi-agent fusion, seriously shaking the foundation of collaboration. To address this issue, we propose CoBEVFlow, an asynchrony-robust collaborative perception system based on bird's eye view (BEV) flow. The key intuition of CoBEVFlow is to compensate motions to align asynchronous collaboration messages sent by multiple agents. To model the motion in a scene, we propose BEV flow, which is a collection of the motion vector corresponding to each spatial location. Based on BEV flow, asynchronous perceptual features can be reassigned to appropriate positions, mitigating the impact of asynchrony. CoBEVFlow has two advantages: (i) CoBEVFlow can handle asynchronous collaboration messages sent at irregular, continuous time stamps without discretization; and (ii) with BEV flow, CoBEVFlow only transports the original perceptual features, instead of generating new perceptual features, avoiding additional noises. To validate CoBEVFlow's efficacy, we create IRregular V2V(IRV2V), the first synthetic collaborative perception dataset with various temporal asynchronies that simulate different real-world scenarios. Extensive experiments conducted on both IRV2V and the real-world dataset DAIR-V2X show that CoBEVFlow consistently outperforms other baselines and is robust in extremely asynchronous settings. The code is available at https://github.com/MediaBrain-SJTU/CoBEVFlow.