 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAS2FM: Enabling Statistical Model Checking of ROS 2 Systems for Robust Autonomy
Aug 26, 2025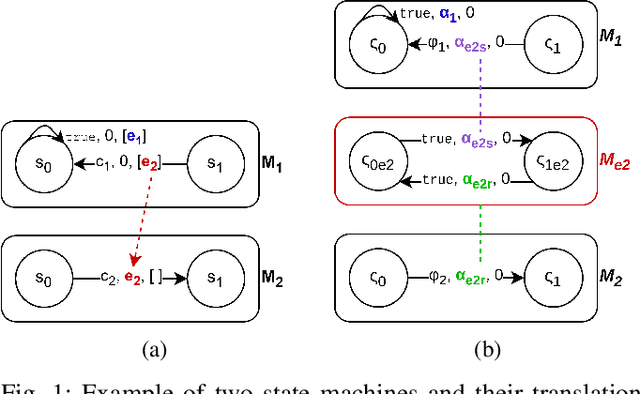
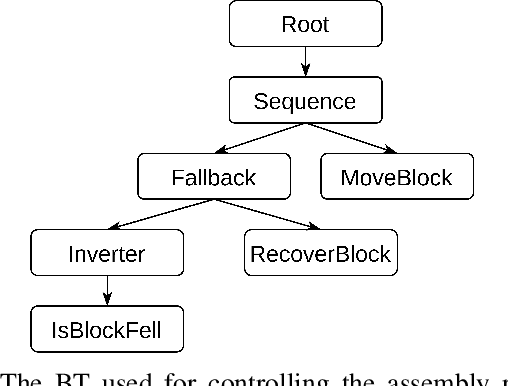
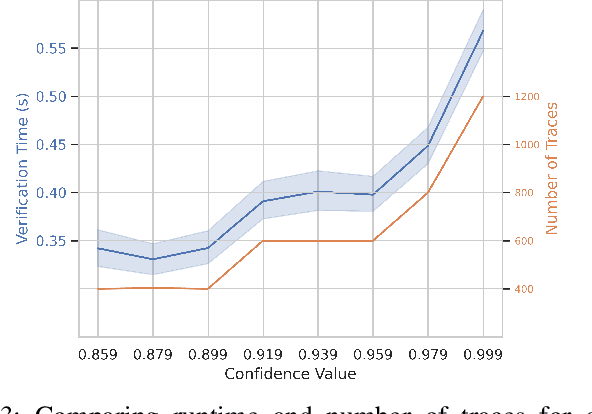
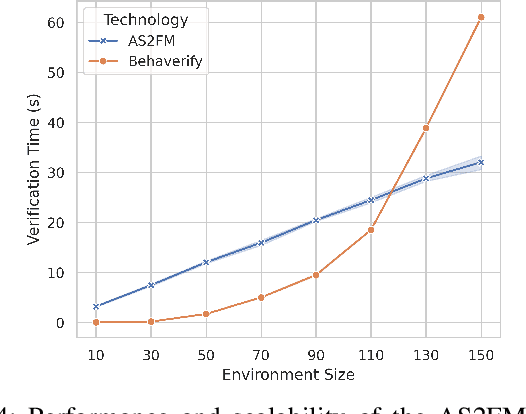
Designing robotic systems to act autonomously in unforeseen environments is a challenging task. This work presents a novel approach to use formal verification, specifically Statistical Model Checking (SMC), to verify system properties of autonomous robots at design-time. We introduce an extension of the SCXML format, designed to model system components including both Robot Operating System 2 (ROS 2) and Behavior Tree (BT) features. Further, we contribute Autonomous Systems to Formal Models (AS2FM), a tool to translate the full system model into JANI. The use of JANI, a standard format for quantitative model checking, enables verification of system properties with off-the-shelf SMC tools. We demonstrate the practical usability of AS2FM both in terms of applicability to real-world autonomous robotic control systems, and in terms of verification runtime scaling. We provide a case study, where we successfully identify problems in a ROS 2-based robotic manipulation use case that is verifiable in less than one second using consumer hardware. Additionally, we compare to the state of the art and demonstrate that our method is more comprehensive in system feature support, and that the verification runtime scales linearly with the size of the model, instead of exponentially.
GSRM: Building Roadmaps for Query-Efficient and Near-Optimal Path Planning Using a Reaction Diffusion System
Oct 14, 2024



Mobile robots frequently navigate on roadmaps, i.e., graphs where edges represent safe motions, in applications such as healthcare, hospitality, and warehouse automation. Often the environment is quasi-static, i.e., it is sufficient to construct a roadmap once and then use it for any future planning queries. Roadmaps are typically used with graph search algorithm to find feasible paths for the robots. Therefore, the roadmap should be well-connected, and graph searches should produce near-optimal solutions with short solution paths while simultaneously be computationally efficient to execute queries quickly. We propose a new method to construct roadmaps based on the Gray-Scott reaction diffusion system and Delaunay triangulation. Our approach, GSRM, produces roadmaps with evenly distributed vertices and edges that are well-connected even in environments with challenging narrow passages. Empirically, we compare to classical roadmaps generated by 8-connected grids, probabilistic roadmaps (PRM, SPARS2), and optimized roadmap graphs (ORM). Our results show that GSRM consistently produces superior roadmaps that are well-connected, have high query efficiency, and result in short solution paths.
* Presented at IROS 2024
Optimized Directed Roadmap Graph for Multi-Agent Path Finding Using Stochastic Gradient Descent
Mar 29, 2020



We present a novel approach called Optimized Directed Roadmap Graph (ODRM). It is a method to build a directed roadmap graph that allows for collision avoidance in multi-robot navigation. This is a highly relevant problem, for example for industrial autonomous guided vehicles. The core idea of ODRM is, that a directed roadmap can encode inherent properties of the environment which are useful when agents have to avoid each other in that same environment. Like Probabilistic Roadmaps (PRMs), ODRM's first step is generating samples from C-space. In a second step, ODRM optimizes vertex positions and edge directions by Stochastic Gradient Descent (SGD). This leads to emergent properties like edges parallel to walls and patterns similar to two-lane streets or roundabouts. Agents can then navigate on this graph by searching their path independently and solving occurring agent-agent collisions at run-time. Using the graphs generated by ODRM compared to a non-optimized graph significantly fewer agent-agent collisions happen. We evaluate our roadmap with both, centralized and decentralized planners. Our experiments show that with ODRM even a simple centralized planner can solve problems with high numbers of agents that other multi-agent planners can not solve. Additionally, we use simulated robots with decentralized planners and online collision avoidance to show how agents are a lot faster on our roadmap than on standard grid maps.
An Optimal Algorithm to Solve the Combined Task Allocation and Path Finding Problem
Jul 24, 2019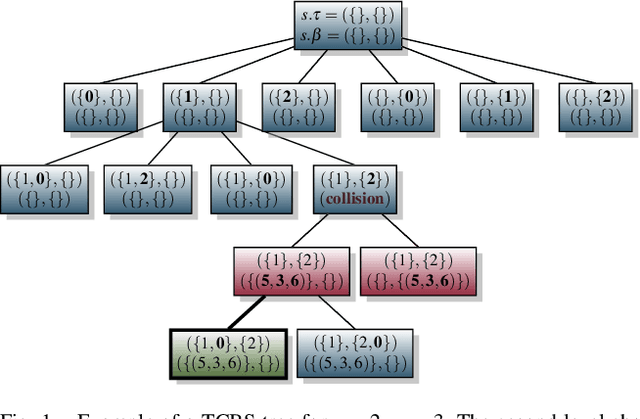
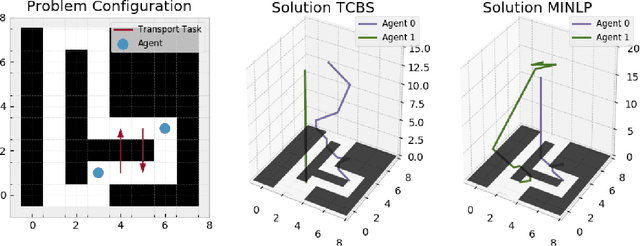
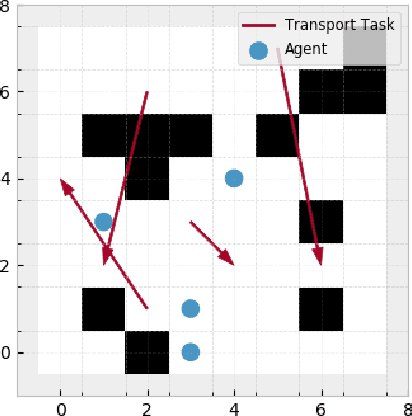
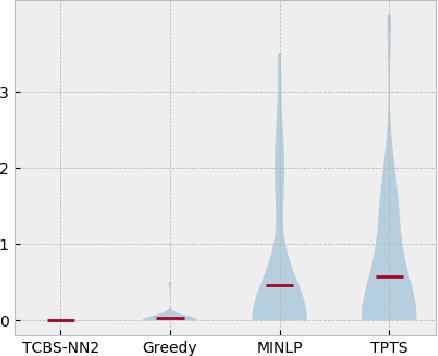
We consider multi-agent transport task problems where, e.g. in a factory setting, items have to be delivered from a given start to a goal pose while the delivering robots need to avoid collisions with each other on the floor. We introduce a Task Conflict-Based Search (TCBS) Algorithm to solve the combined delivery task allocation and multi-agent path planning problem optimally. The problem is known to be NP-hard and the optimal solver cannot scale. However, we introduce it as a baseline to evaluate the sub-optimality of other approaches. We show experimental results that compare our solver with different sub-optimal ones in terms of regret.