 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnsuring Progress for Multiple Mobile Robots via Space Partitioning, Motion Rules, and Adaptively Centralized Conflict Resolution
Feb 25, 2021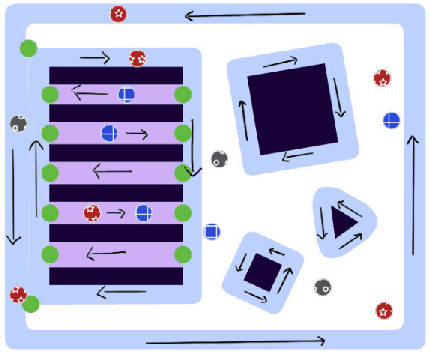
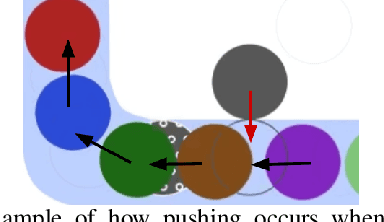
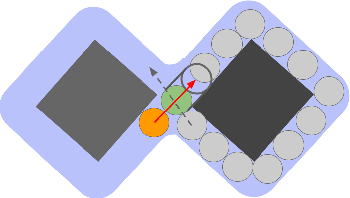
In environments where multiple robots must coordinate in a shared space, decentralized approaches allow for decoupled planning at the cost of global guarantees, while centralized approaches make the opposite trade-off. These solutions make a range of assumptions - commonly, that all the robots share the same planning strategies. In this work, we present a framework that ensures progress for all robots without assumptions on any robot's planning strategy by (1) generating a partition of the environment into "flow", "open", and "passage" regions and (2) imposing a set of rules for robot motion in these regions. These rules for robot motion prevent deadlock through an adaptively centralized protocol for resolving spatial conflicts between robots. Our proposed framework ensures progress for all robots without a grid-like discretization of the environment or strong requirements on robot communication, coordination, or cooperation. Each robot can freely choose how to plan and coordinate for itself, without being vulnerable to other robots or groups of robots blocking them from their goals, as long as they follow the rules when necessary. We describe our space partition and motion rules, prove that the motion rules suffice to guarantee progress in partitioned environments, and demonstrate several cases in simulated polygonal environments. This work strikes a balance between each robot's planning independence and a guarantee that each robot can always reach any goal in finite time.
Usability Squared: Principles for doing good systems research in robotics
Jun 16, 2019
Despite recent major advances in robotics research, massive injections of capital into robotics startups, and significant market appetite for robotic solutions, large-scale real-world deployments of robotic systems remain relatively scarce outside of heavy industry and (recently) warehouse logistics. In this paper, we posit that this scarcity comes from the difficulty of building even merely functional, first-pass robotic applications without a dizzying breadth and depth of expertise, in contrast to the relative ease with which non-experts in cloud computing can build complex distributed applications that function reasonably well. We trace this difficulty in application building to the paucity of good systems research in robotics, and lay out a path toward enabling application building by centering usability in systems research in two different ways: privileging the usability of the abstractions defined in systems research, and ensuring that the research itself is usable by application developers in the context of evaluating it for its applicability to their target domain by following principles of realism, empiricism, and exhaustive explication. In addition, we make some suggestions for community-level changes, incentives, and initiatives to create a better environment for systems work in robotics.