 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLazy-DaSH: Lazy Approach for Hypergraph-based Multi-robot Task and Motion Planning
Apr 07, 2025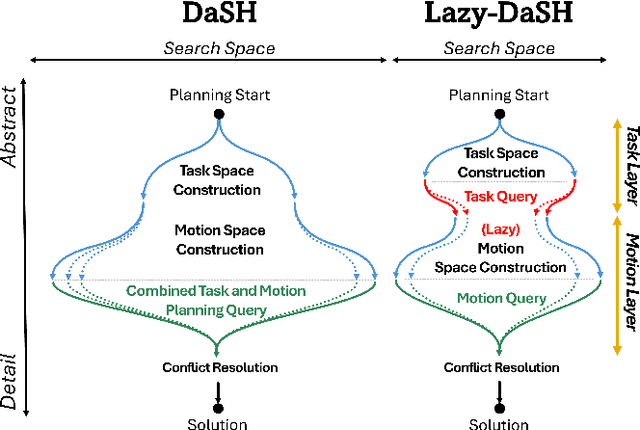
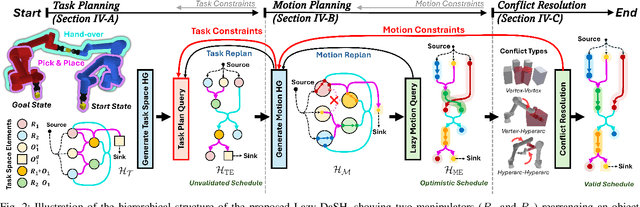
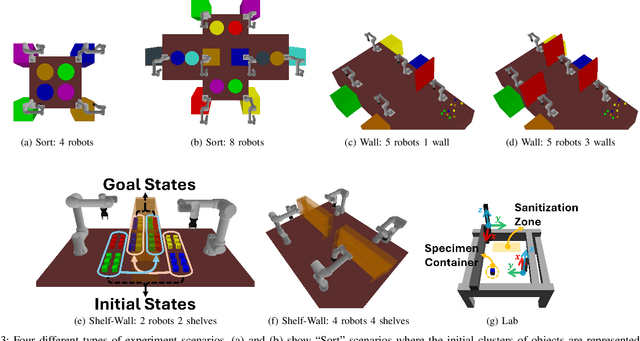
We introduce Lazy-DaSH, an improvement over the recent state of the art multi-robot task and motion planning method DaSH, which scales to more than double the number of robots and objects compared to the original method and achieves an order of magnitude faster planning time when applied to a multi-manipulator object rearrangement problem. We achieve this improvement through a hierarchical approach, where a high-level task planning layer identifies planning spaces required for task completion, and motion feasibility is validated lazily only within these spaces. In contrast, DaSH precomputes the motion feasibility of all possible actions, resulting in higher costs for constructing state space representations. Lazy-DaSH maintains efficient query performance by utilizing a constraint feedback mechanism within its hierarchical structure, ensuring that motion feasibility is effectively conveyed to the query process. By maintaining smaller state space representations, our method significantly reduces both representation construction time and query time. We evaluate Lazy-DaSH in four distinct scenarios, demonstrating its scalability to increasing numbers of robots and objects, as well as its adaptability in resolving conflicts through the constraint feedback mechanism.