Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeamless Interaction Design with Coexistence and Cooperation Modes for Robust Human-Robot Collaboration
Paper and Code
Jun 09, 2022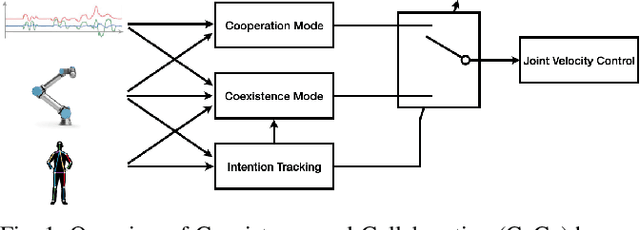

A robot needs multiple interaction modes to robustly collaborate with a human in complicated industrial tasks. We develop a Coexistence-and-Cooperation (CoCo) human-robot collaboration system. Coexistence mode enables the robot to work with the human on different sub-tasks independently in a shared space. Cooperation mode enables the robot to follow human guidance and recover failures. A human intention tracking algorithm takes in both human and robot motion measurements as input and provides a switch on the interaction modes. We demonstrate the effectiveness of CoCo system in a use case analogous to a real world multi-step assembly task.
* Accepted by CASE 2022 Special Session on Adaptive and Resilient
Cyber-Physical Manufacturing Networks
View paper on