 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Intention Tracking with Switching Trees for Real-Time Adaptation to Dynamic Human Intentions during Collaboration
Jun 08, 2025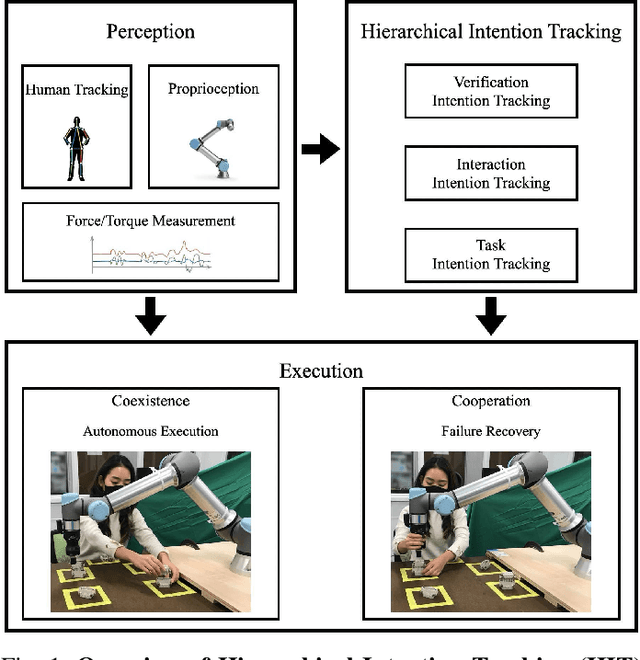
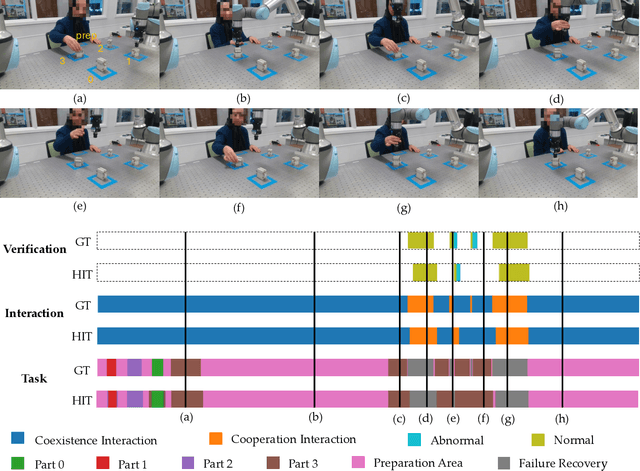
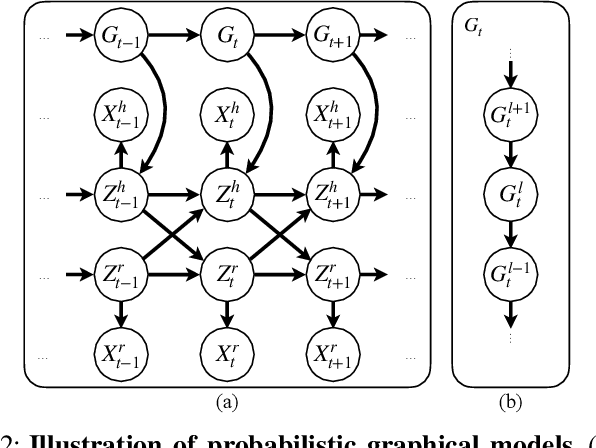
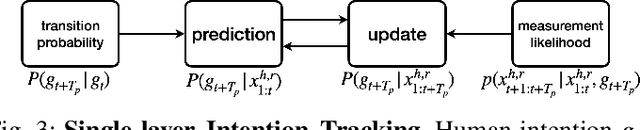
During collaborative tasks, human behavior is guided by multiple levels of intentions that evolve over time, such as task sequence preferences and interaction strategies. To adapt to these changing preferences and promptly correct any inaccurate estimations, collaborative robots must accurately track these dynamic human intentions in real time. We propose a Hierarchical Intention Tracking (HIT) algorithm for collaborative robots to track dynamic and hierarchical human intentions effectively in real time. HIT represents human intentions as intention trees with arbitrary depth, and probabilistically tracks human intentions by Bayesian filtering, upward measurement propagation, and downward posterior propagation across all levels. We develop a HIT-based robotic system that dynamically switches between Interaction-Task and Verification-Task trees for a collaborative assembly task, allowing the robot to effectively coordinate human intentions at three levels: task-level (subtask goal locations), interaction-level (mode of engagement with the robot), and verification-level (confirming or correcting intention recognition). Our user study shows that our HIT-based collaborative robot system surpasses existing collaborative robot solutions by achieving a balance between efficiency, physical workload, and user comfort while ensuring safety and task completion. Post-experiment surveys further reveal that the HIT-based system enhances the user trust and minimizes interruptions to user's task flow through its effective understanding of human intentions across multiple levels.
A Unified Framework for Robots that Influence Humans over Long-Term Interaction
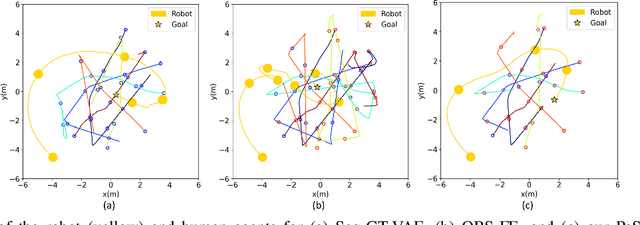
Mar 18, 2025Robot actions influence the decisions of nearby humans. Here influence refers to intentional change: robots influence humans when they shift the human's behavior in a way that helps the robot complete its task. Imagine an autonomous car trying to merge; by proactively nudging into the human's lane, the robot causes human drivers to yield and provide space. Influence is often necessary for seamless interaction. However, if influence is left unregulated and uncontrolled, robots will negatively impact the humans around them. Prior works have begun to address this problem by creating a variety of control algorithms that seek to influence humans. Although these methods are effective in the short-term, they fail to maintain influence over time as the human adapts to the robot's behaviors. In this paper we therefore present an optimization framework that enables robots to purposely regulate their influence over humans across both short-term and long-term interactions. Here the robot maintains its influence by reasoning over a dynamic human model which captures how the robot's current choices will impact the human's future behavior. Our resulting framework serves to unify current approaches: we demonstrate that state-of-the-art methods are simplifications of our underlying formalism. Our framework also provides a principled way to generate influential policies: in the best case the robot exactly solves our framework to find optimal, influential behavior. But when solving this optimization problem becomes impractical, designers can introduce their own simplifications to reach tractable approximations. We experimentally compare our unified framework to state-of-the-art baselines and ablations, and demonstrate across simulations and user studies that this framework is able to successfully influence humans over repeated interactions. See videos of our experiments here: https://youtu.be/nPekTUfUEbo
Learning Task Skills and Goals Simultaneously from Physical Interaction
Sep 08, 2023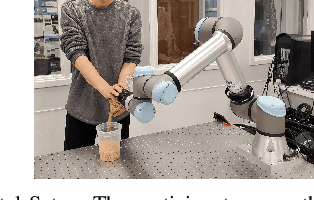
In real-world human-robot systems, it is essential for a robot to comprehend human objectives and respond accordingly while performing an extended series of motor actions. Although human objective alignment has recently emerged as a promising paradigm in the realm of physical human-robot interaction, its application is typically confined to generating simple motions due to inherent theoretical limitations. In this work, our goal is to develop a general formulation to learn manipulation functional modules and long-term task goals simultaneously from physical human-robot interaction. We show the feasibility of our framework in enabling robots to align their behaviors with the long-term task objectives inferred from human interactions.
Towards Safe Multi-Level Human-Robot Interaction in Industrial Tasks
Aug 06, 2023
Multiple levels of safety measures are required by multiple interaction modes which collaborative robots need to perform industrial tasks with human co-workers. We develop three independent modules to account for safety in different types of human-robot interaction: vision-based safety monitoring pauses robot when human is present in a shared space; contact-based safety monitoring pauses robot when unexpected contact happens between human and robot; hierarchical intention tracking keeps robot in a safe distance from human when human and robot work independently, and switches robot to compliant mode when human intends to guide robot. We discuss the prospect of future research in development and integration of multi-level safety modules. We focus on how to provide safety guarantees for collaborative robot solutions with human behavior modeling.
User-Friendly Safety Monitoring System for Manufacturing Cobots
Jul 04, 2023

Collaborative robots are being increasingly utilized in industrial production lines due to their efficiency and accuracy. However, the close proximity between humans and robots can pose safety risks due to the robot's high-speed movements and powerful forces. To address this, we developed a vision-based safety monitoring system that creates a 3D reconstruction of the collaborative scene. Our system records the human-robot interaction data in real-time and reproduce their virtual replicas in a simulator for offline analysis. The objective is to provide workers with a user-friendly visualization tool for reviewing performance and diagnosing failures, thereby enhancing safety in manufacturing settings.
Occlusion-Aware Crowd Navigation Using People as Sensors
Oct 02, 2022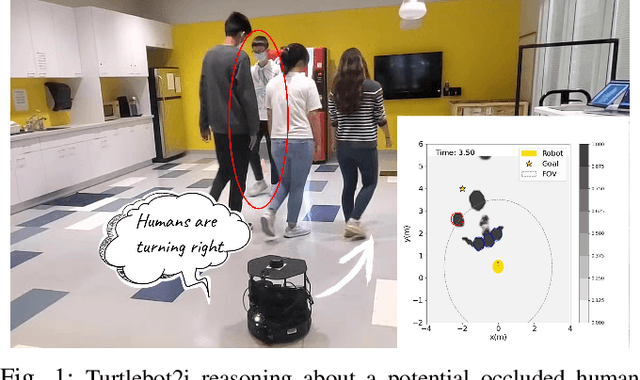
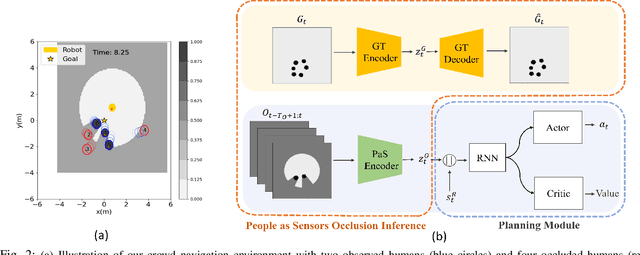
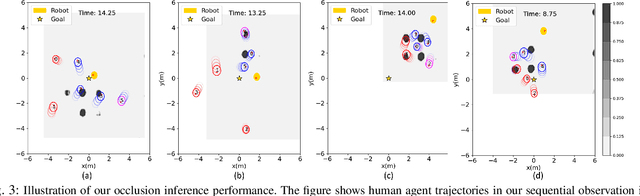
Autonomous navigation in crowded spaces poses a challenge for mobile robots due to the highly dynamic, partially observable environment. Occlusions are highly prevalent in such settings due to a limited sensor field of view and obstructing human agents. Previous work has shown that observed interactive behaviors of human agents can be used to estimate potential obstacles despite occlusions. We propose integrating such social inference techniques into the planning pipeline. We use a variational autoencoder with a specially designed loss function to learn representations that are meaningful for occlusion inference. This work adopts a deep reinforcement learning approach to incorporate the learned representation for occlusion-aware planning. In simulation, our occlusion-aware policy achieves comparable collision avoidance performance to fully observable navigation by estimating agents in occluded spaces. We demonstrate successful policy transfer from simulation to the real-world Turtlebot 2i. To the best of our knowledge, this work is the first to use social occlusion inference for crowd navigation.
Towards Robots that Influence Humans over Long-Term Interaction
Sep 21, 2022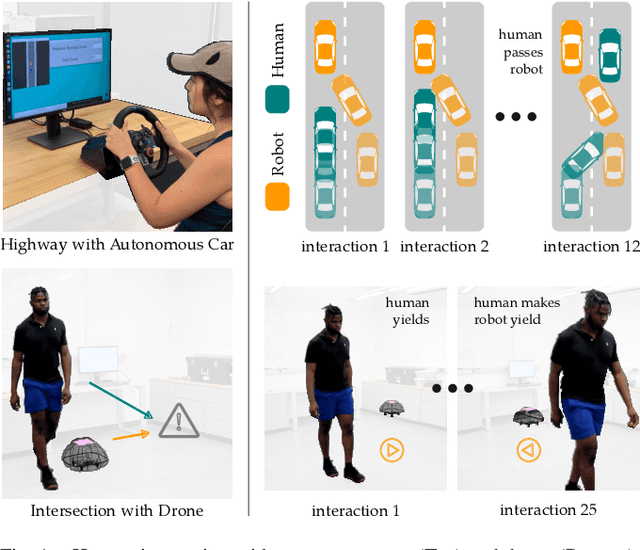
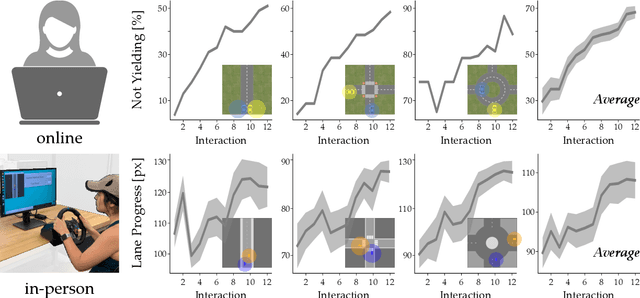
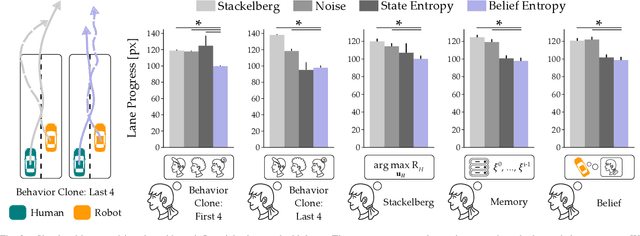
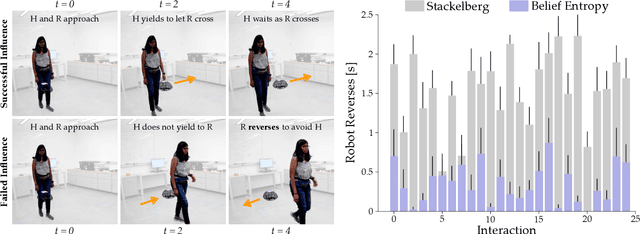
When humans interact with robots influence is inevitable. Consider an autonomous car driving near a human: the speed and steering of the autonomous car will affect how the human drives. Prior works have developed frameworks that enable robots to influence humans towards desired behaviors. But while these approaches are effective in the short-term (i.e., the first few human-robot interactions), here we explore long-term influence (i.e., repeated interactions between the same human and robot). Our central insight is that humans are dynamic: people adapt to robots, and behaviors which are influential now may fall short once the human learns to anticipate the robot's actions. With this insight, we experimentally demonstrate that a prevalent game-theoretic formalism for generating influential robot behaviors becomes less effective over repeated interactions. Next, we propose three modifications to Stackelberg games that make the robot's policy both influential and unpredictable. We finally test these modifications across simulations and user studies: our results suggest that robots which purposely make their actions harder to anticipate are better able to maintain influence over long-term interaction. See videos here: https://youtu.be/ydO83cgjZ2Q
Seamless Interaction Design with Coexistence and Cooperation Modes for Robust Human-Robot Collaboration
Jun 09, 2022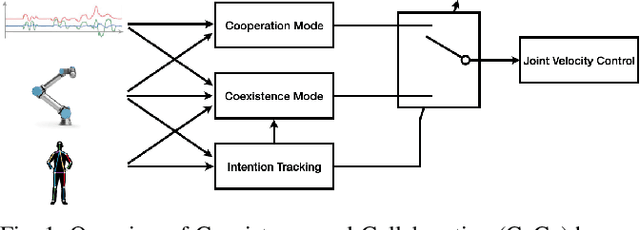

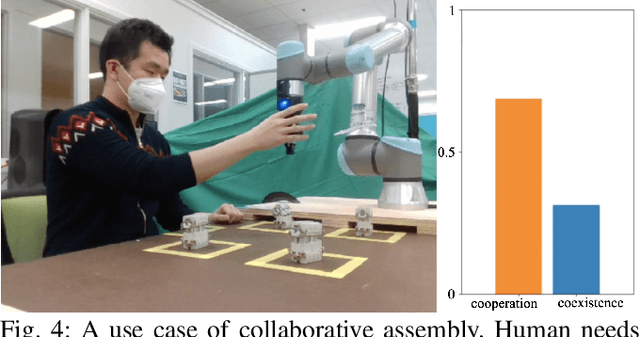
A robot needs multiple interaction modes to robustly collaborate with a human in complicated industrial tasks. We develop a Coexistence-and-Cooperation (CoCo) human-robot collaboration system. Coexistence mode enables the robot to work with the human on different sub-tasks independently in a shared space. Cooperation mode enables the robot to follow human guidance and recover failures. A human intention tracking algorithm takes in both human and robot motion measurements as input and provides a switch on the interaction modes. We demonstrate the effectiveness of CoCo system in a use case analogous to a real world multi-step assembly task.
Insights from an Industrial Collaborative Assembly Project: Lessons in Research and Collaboration
May 28, 2022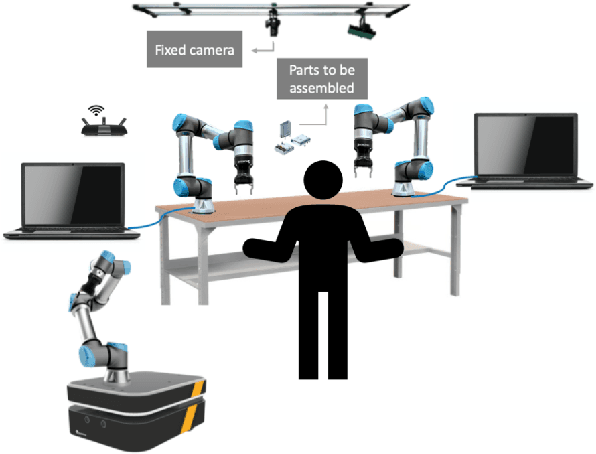
Significant progress in robotics reveals new opportunities to advance manufacturing. Next-generation industrial automation will require both integration of distinct robotic technologies and their application to challenging industrial environments. This paper presents lessons from a collaborative assembly project between three academic research groups and an industry partner. The goal of the project is to develop a flexible, safe, and productive manufacturing cell for sub-centimeter precision assembly. Solving this problem in a high-mix, low-volume production line motivates multiple research thrusts in robotics. This work identifies new directions in collaborative robotics for industrial applications and offers insight toward strengthening collaborations between institutions in academia and industry on the development of new technologies.
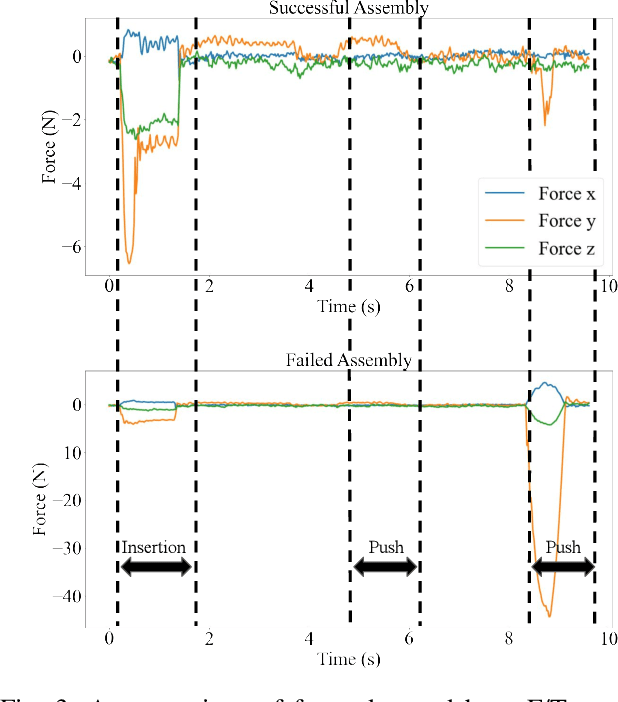
Hierarchical Intention Tracking for Robust Human-Robot Collaboration in Industrial Assembly Tasks
Mar 17, 2022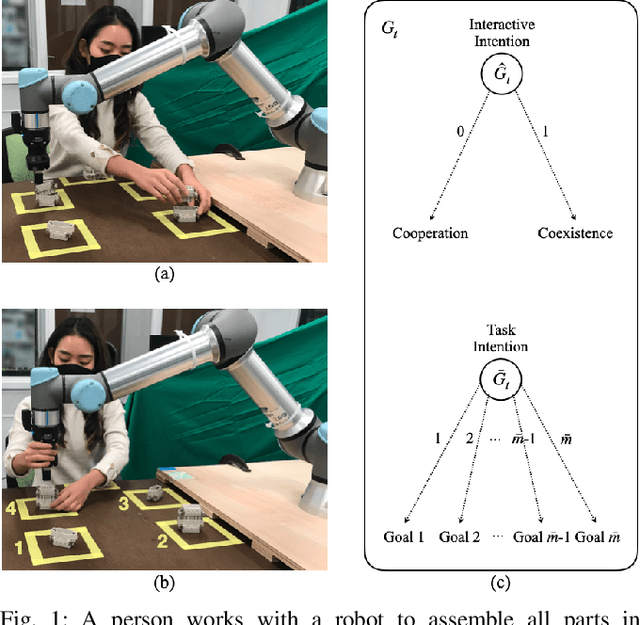
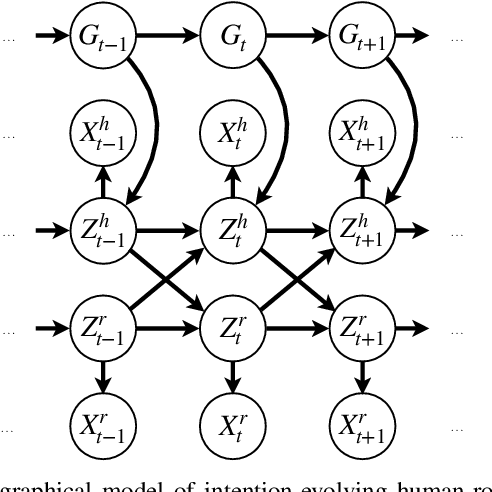
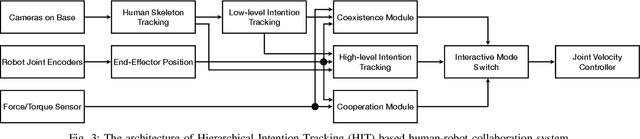

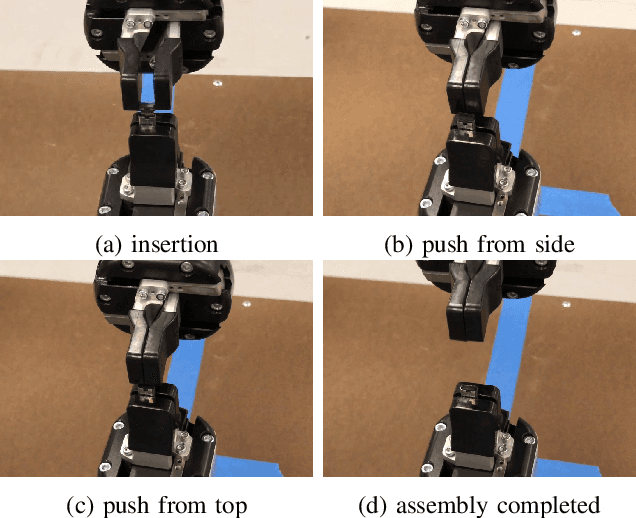
Collaborative robots require effective intention estimation to safely and smoothly work with humans in less structured tasks such as industrial assembly. During these tasks, human intention continuously changes across multiple steps, and is composed of a hierarchy including high-level interactive intention and low-level task intention. Thus, we propose the concept of intention tracking and introduce a collaborative robot system with a hierarchical framework that concurrently tracks intentions at both levels by observing force/torque measurements, robot state sequences, and tracked human trajectories. The high-level intention estimate enables the robot to both (1) safely avoid collision with the human to minimize interruption and (2) cooperatively approach the human and help recover from an assembly failure through admittance control. The low-level intention estimate provides the robot with task-specific information (e.g., which part the human is working on) for concurrent task execution. We implement the system on a UR5e robot, and demonstrate robust, seamless and ergonomic collaboration between the human and the robot in an assembly use case through an ablative pilot study.