 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Attentional Recurrent Neural Network for Occlusion-Aware Proactive Anomaly Detection in Field Robot Navigation
Sep 28, 2023



The use of mobile robots in unstructured environments like the agricultural field is becoming increasingly common. The ability for such field robots to proactively identify and avoid failures is thus crucial for ensuring efficiency and avoiding damage. However, the cluttered field environment introduces various sources of noise (such as sensor occlusions) that make proactive anomaly detection difficult. Existing approaches can show poor performance in sensor occlusion scenarios as they typically do not explicitly model occlusions and only leverage current sensory inputs. In this work, we present an attention-based recurrent neural network architecture for proactive anomaly detection that fuses current sensory inputs and planned control actions with a latent representation of prior robot state. We enhance our model with an explicitly-learned model of sensor occlusion that is used to modulate the use of our latent representation of prior robot state. Our method shows improved anomaly detection performance and enables mobile field robots to display increased resilience to predicting false positives regarding navigation failure during periods of sensor occlusion, particularly in cases where all sensors are briefly occluded. Our code is available at: https://github.com/andreschreiber/roar
Learning Task Skills and Goals Simultaneously from Physical Interaction
Sep 08, 2023
In real-world human-robot systems, it is essential for a robot to comprehend human objectives and respond accordingly while performing an extended series of motor actions. Although human objective alignment has recently emerged as a promising paradigm in the realm of physical human-robot interaction, its application is typically confined to generating simple motions due to inherent theoretical limitations. In this work, our goal is to develop a general formulation to learn manipulation functional modules and long-term task goals simultaneously from physical human-robot interaction. We show the feasibility of our framework in enabling robots to align their behaviors with the long-term task objectives inferred from human interactions.
Towards Safe Multi-Level Human-Robot Interaction in Industrial Tasks
Aug 06, 2023
Multiple levels of safety measures are required by multiple interaction modes which collaborative robots need to perform industrial tasks with human co-workers. We develop three independent modules to account for safety in different types of human-robot interaction: vision-based safety monitoring pauses robot when human is present in a shared space; contact-based safety monitoring pauses robot when unexpected contact happens between human and robot; hierarchical intention tracking keeps robot in a safe distance from human when human and robot work independently, and switches robot to compliant mode when human intends to guide robot. We discuss the prospect of future research in development and integration of multi-level safety modules. We focus on how to provide safety guarantees for collaborative robot solutions with human behavior modeling.
DRAGON: A Dialogue-Based Robot for Assistive Navigation with Visual Language Grounding
Jul 13, 2023Persons with visual impairments (PwVI) have difficulties understanding and navigating spaces around them. Current wayfinding technologies either focus solely on navigation or provide limited communication about the environment. Motivated by recent advances in visual-language grounding and semantic navigation, we propose DRAGON, a guiding robot powered by a dialogue system and the ability to associate the environment with natural language. By understanding the commands from the user, DRAGON is able to guide the user to the desired landmarks on the map, describe the environment, and answer questions from visual observations. Through effective utilization of dialogue, the robot can ground the user's free-form descriptions to landmarks in the environment, and give the user semantic information through spoken language. We conduct a user study with blindfolded participants in an everyday indoor environment. Our results demonstrate that DRAGON is able to communicate with the user smoothly, provide a good guiding experience, and connect users with their surrounding environment in an intuitive manner.
User-Friendly Safety Monitoring System for Manufacturing Cobots
Jul 04, 2023

Collaborative robots are being increasingly utilized in industrial production lines due to their efficiency and accuracy. However, the close proximity between humans and robots can pose safety risks due to the robot's high-speed movements and powerful forces. To address this, we developed a vision-based safety monitoring system that creates a 3D reconstruction of the collaborative scene. Our system records the human-robot interaction data in real-time and reproduce their virtual replicas in a simulator for offline analysis. The objective is to provide workers with a user-friendly visualization tool for reviewing performance and diagnosing failures, thereby enhancing safety in manufacturing settings.
Learning Rewards and Skills to Follow Commands with A Data Efficient Visual-Audio Representation
Jan 23, 2023Based on the recent advancements in representation learning, we propose a novel framework for command-following robots with raw sensor inputs. Previous RL-based methods are either difficult to continuously improve after the deployment or require a large number of new labels during the fine-tuning. Motivated by (self-)supervised contrastive learning literature, we propose a novel representation, named VAR++, that generates an intrinsic reward function for command-following robot tasks by associating images with sound commands. After the robot is deployed in a new domain, the representation can be updated intuitively and data-efficiently by non-experts, and the robot is able to fulfill sound commands without any hand-crafted reward functions. We demonstrate our approach on various sound types and robotic tasks, including navigation and manipulation with raw sensor inputs. In the simulated experiments, we show that our system can continually self-improve in previously unseen scenarios given fewer new labeled data, yet achieves better performance, compared with previous methods.
Structural Attention-Based Recurrent Variational Autoencoder for Highway Vehicle Anomaly Detection
Jan 09, 2023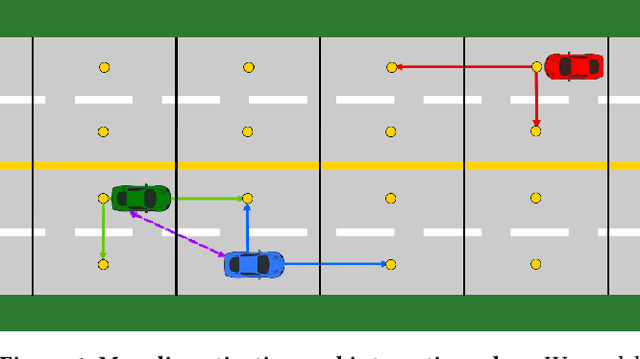
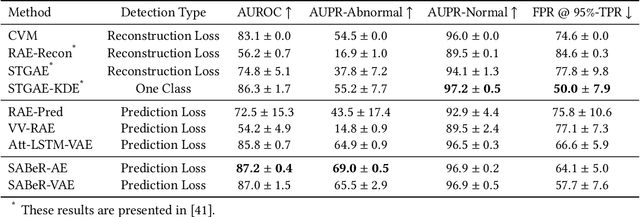
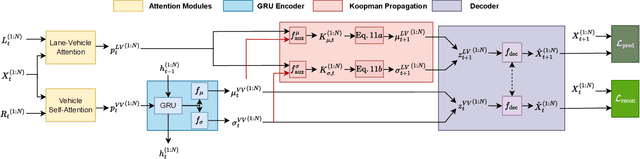
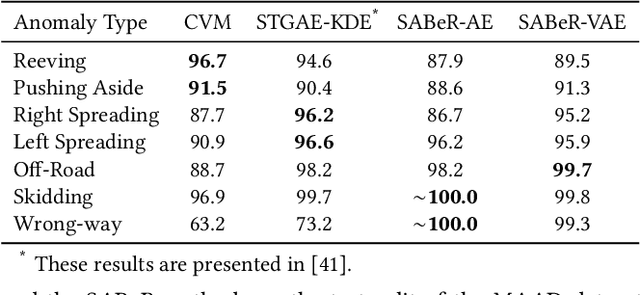
In autonomous driving, detection of abnormal driving behaviors is essential to ensure the safety of vehicle controllers. Prior works in vehicle anomaly detection have shown that modeling interactions between agents improves detection accuracy, but certain abnormal behaviors where structured road information is paramount are poorly identified, such as wrong-way and off-road driving. We propose a novel unsupervised framework for highway anomaly detection named Structural Attention-based Recurrent VAE (SABeR-VAE), which explicitly uses the structure of the environment to aid anomaly identification. Specifically, we use a vehicle self-attention module to learn the relations among vehicles on a road, and a separate lane-vehicle attention module to model the importance of permissible lanes to aid in trajectory prediction. Conditioned on the attention modules' outputs, a recurrent encoder-decoder architecture with a stochastic Koopman operator-propagated latent space predicts the next states of vehicles. Our model is trained end-to-end to minimize prediction loss on normal vehicle behaviors, and is deployed to detect anomalies in (ab)normal scenarios. By combining the heterogeneous vehicle and lane information, SABeR-VAE and its deterministic variant, SABeR-AE, improve abnormal AUPR by 18% and 25% respectively on the simulated MAAD highway dataset. Furthermore, we show that the learned Koopman operator in SABeR-VAE enforces interpretable structure in the variational latent space. The results of our method indeed show that modeling environmental factors is essential to detecting a diverse set of anomalies in deployment.