 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Advisory Residual Policies for Congestion Mitigation
Jun 30, 2024



Fleets of autonomous vehicles can mitigate traffic congestion through simple actions, thus improving many socioeconomic factors such as commute time and gas costs. However, these approaches are limited in practice as they assume precise control over autonomous vehicle fleets, incur extensive installation costs for a centralized sensor ecosystem, and also fail to account for uncertainty in driver behavior. To this end, we develop a class of learned residual policies that can be used in cooperative advisory systems and only require the use of a single vehicle with a human driver. Our policies advise drivers to behave in ways that mitigate traffic congestion while accounting for diverse driver behaviors, particularly drivers' reactions to instructions, to provide an improved user experience. To realize such policies, we introduce an improved reward function that explicitly addresses congestion mitigation and driver attitudes to advice. We show that our residual policies can be personalized by conditioning them on an inferred driver trait that is learned in an unsupervised manner with a variational autoencoder. Our policies are trained in simulation with our novel instruction adherence driver model, and evaluated in simulation and through a user study (N=16) to capture the sentiments of human drivers. Our results show that our approaches successfully mitigate congestion while adapting to different driver behaviors, with up to 20% and 40% improvement as measured by a combination metric of speed and deviations in speed across time over baselines in our simulation tests and user study, respectively. Our user study further shows that our policies are human-compatible and personalize to drivers.
PeRP: Personalized Residual Policies For Congestion Mitigation Through Co-operative Advisory Systems
Aug 15, 2023



Intelligent driving systems can be used to mitigate congestion through simple actions, thus improving many socioeconomic factors such as commute time and gas costs. However, these systems assume precise control over autonomous vehicle fleets, and are hence limited in practice as they fail to account for uncertainty in human behavior. Piecewise Constant (PC) Policies address these issues by structurally modeling the likeness of human driving to reduce traffic congestion in dense scenarios to provide action advice to be followed by human drivers. However, PC policies assume that all drivers behave similarly. To this end, we develop a co-operative advisory system based on PC policies with a novel driver trait conditioned Personalized Residual Policy, PeRP. PeRP advises drivers to behave in ways that mitigate traffic congestion. We first infer the driver's intrinsic traits on how they follow instructions in an unsupervised manner with a variational autoencoder. Then, a policy conditioned on the inferred trait adapts the action of the PC policy to provide the driver with a personalized recommendation. Our system is trained in simulation with novel driver modeling of instruction adherence. We show that our approach successfully mitigates congestion while adapting to different driver behaviors, with 4 to 22% improvement in average speed over baselines.
DRAGON: A Dialogue-Based Robot for Assistive Navigation with Visual Language Grounding
Jul 13, 2023Persons with visual impairments (PwVI) have difficulties understanding and navigating spaces around them. Current wayfinding technologies either focus solely on navigation or provide limited communication about the environment. Motivated by recent advances in visual-language grounding and semantic navigation, we propose DRAGON, a guiding robot powered by a dialogue system and the ability to associate the environment with natural language. By understanding the commands from the user, DRAGON is able to guide the user to the desired landmarks on the map, describe the environment, and answer questions from visual observations. Through effective utilization of dialogue, the robot can ground the user's free-form descriptions to landmarks in the environment, and give the user semantic information through spoken language. We conduct a user study with blindfolded participants in an everyday indoor environment. Our results demonstrate that DRAGON is able to communicate with the user smoothly, provide a good guiding experience, and connect users with their surrounding environment in an intuitive manner.
Towards Co-operative Congestion Mitigation
Feb 17, 2023



The effects of traffic congestion are widespread and are an impedance to everyday life. Piecewise constant driving policies have shown promise in helping mitigate traffic congestion in simulation environments. However, no works currently test these policies in situations involving real human users. Thus, we propose to evaluate these policies through the use of a shared control framework in a collaborative experiment with the human driver and the driving policy aiming to co-operatively mitigate congestion. We intend to use the CARLA simulator alongside the Flow framework to conduct user studies to evaluate the affect of piecewise constant driving policies. As such, we present our in-progress work in building our framework and discuss our proposed plan on evaluating this framework through a human-in-the-loop simulation user study.
Designing a Wayfinding Robot for People with Visual Impairments
Feb 17, 2023People with visual impairments (PwVI) often have difficulties navigating through unfamiliar indoor environments. However, current wayfinding tools are fairly limited. In this short paper, we present our in-progress work on a wayfinding robot for PwVI. The robot takes an audio command from the user that specifies the intended destination. Then, the robot autonomously plans a path to navigate to the goal. We use sensors to estimate the real-time position of the user, which is fed to the planner to improve the safety and comfort of the user. In addition, the robot describes the surroundings to the user periodically to prevent disorientation and potential accidents. We demonstrate the feasibility of our design in a public indoor environment. Finally, we analyze the limitations of our current design, as well as our insights and future work. A demonstration video can be found at https://youtu.be/BS9r5bkIass.
Structural Attention-Based Recurrent Variational Autoencoder for Highway Vehicle Anomaly Detection
Jan 09, 2023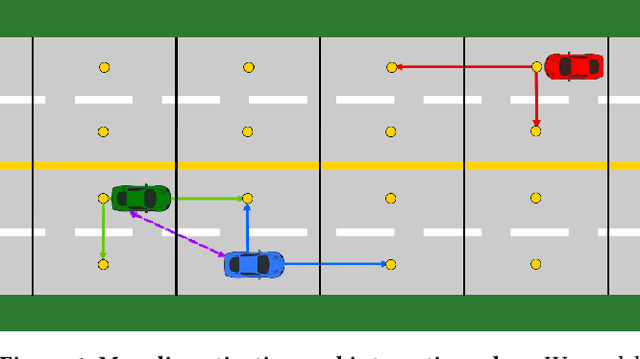
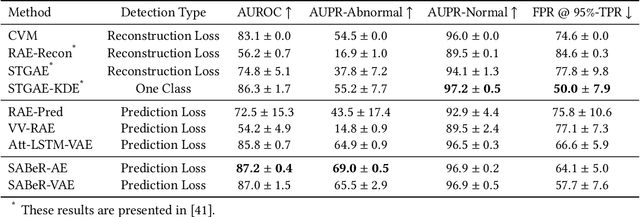
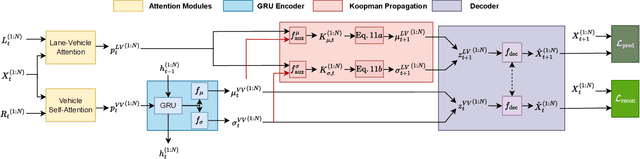
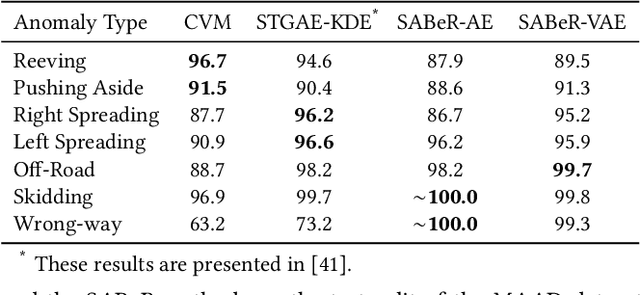
In autonomous driving, detection of abnormal driving behaviors is essential to ensure the safety of vehicle controllers. Prior works in vehicle anomaly detection have shown that modeling interactions between agents improves detection accuracy, but certain abnormal behaviors where structured road information is paramount are poorly identified, such as wrong-way and off-road driving. We propose a novel unsupervised framework for highway anomaly detection named Structural Attention-based Recurrent VAE (SABeR-VAE), which explicitly uses the structure of the environment to aid anomaly identification. Specifically, we use a vehicle self-attention module to learn the relations among vehicles on a road, and a separate lane-vehicle attention module to model the importance of permissible lanes to aid in trajectory prediction. Conditioned on the attention modules' outputs, a recurrent encoder-decoder architecture with a stochastic Koopman operator-propagated latent space predicts the next states of vehicles. Our model is trained end-to-end to minimize prediction loss on normal vehicle behaviors, and is deployed to detect anomalies in (ab)normal scenarios. By combining the heterogeneous vehicle and lane information, SABeR-VAE and its deterministic variant, SABeR-AE, improve abnormal AUPR by 18% and 25% respectively on the simulated MAAD highway dataset. Furthermore, we show that the learned Koopman operator in SABeR-VAE enforces interpretable structure in the variational latent space. The results of our method indeed show that modeling environmental factors is essential to detecting a diverse set of anomalies in deployment.
CoCAtt: A Cognitive-Conditioned Driver Attention Dataset (Supplementary Material)
Jul 08, 2022
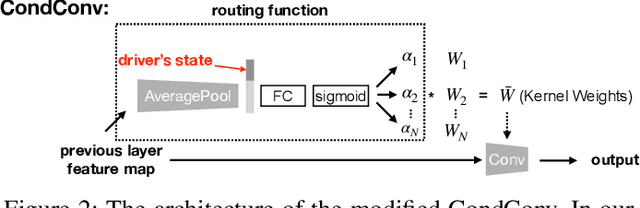
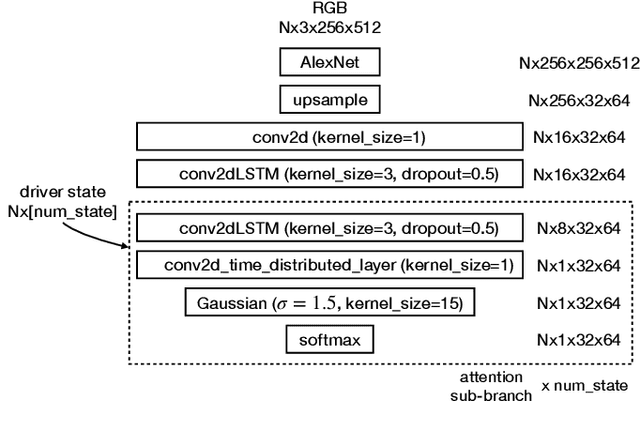
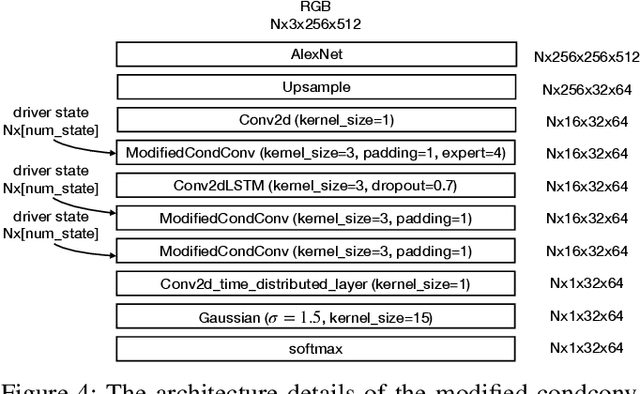
The task of driver attention prediction has drawn considerable interest among researchers in robotics and the autonomous vehicle industry. Driver attention prediction can play an instrumental role in mitigating and preventing high-risk events, like collisions and casualties. However, existing driver attention prediction models neglect the distraction state and intention of the driver, which can significantly influence how they observe their surroundings. To address these issues, we present a new driver attention dataset, CoCAtt (Cognitive-Conditioned Attention). Unlike previous driver attention datasets, CoCAtt includes per-frame annotations that describe the distraction state and intention of the driver. In addition, the attention data in our dataset is captured in both manual and autopilot modes using eye-tracking devices of different resolutions. Our results demonstrate that incorporating the above two driver states into attention modeling can improve the performance of driver attention prediction. To the best of our knowledge, this work is the first to provide autopilot attention data. Furthermore, CoCAtt is currently the largest and the most diverse driver attention dataset in terms of autonomy levels, eye tracker resolutions, and driving scenarios. CoCAtt is available for download at https://cocatt-dataset.github.io.
Meta-path Analysis on Spatio-Temporal Graphs for Pedestrian Trajectory Prediction
Feb 27, 2022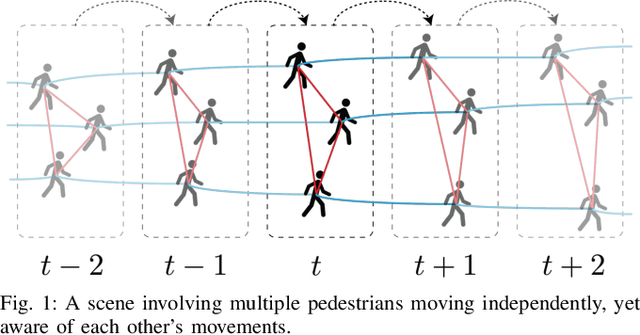
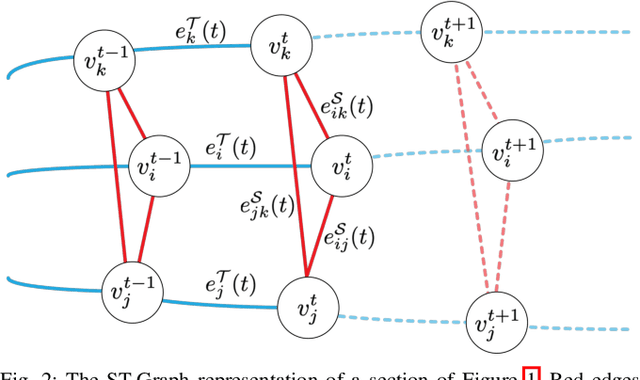
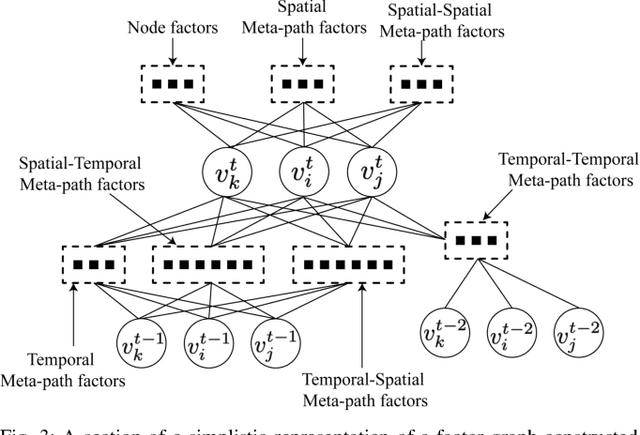
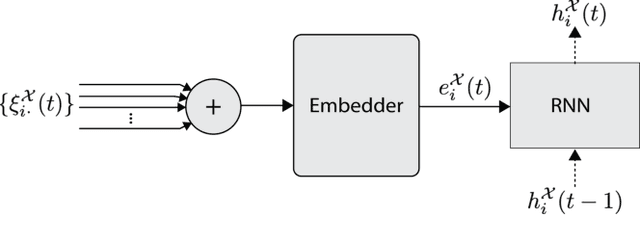
Spatio-temporal graphs (ST-graphs) have been used to model time series tasks such as traffic forecasting, human motion modeling, and action recognition. The high-level structure and corresponding features from ST-graphs have led to improved performance over traditional architectures. However, current methods tend to be limited by simple features, despite the rich information provided by the full graph structure, which leads to inefficiencies and suboptimal performance in downstream tasks. We propose the use of features derived from meta-paths, walks across different types of edges, in ST-graphs to improve the performance of Structural Recurrent Neural Network. In this paper, we present the Meta-path Enhanced Structural Recurrent Neural Network (MESRNN), a generic framework that can be applied to any spatio-temporal task in a simple and scalable manner. We employ MESRNN for pedestrian trajectory prediction, utilizing these meta-path based features to capture the relationships between the trajectories of pedestrians at different points in time and space. We compare our MESRNN against state-of-the-art ST-graph methods on standard datasets to show the performance boost provided by meta-path information. The proposed model consistently outperforms the baselines in trajectory prediction over long time horizons by over 32\%, and produces more socially compliant trajectories in dense crowds. For more information please refer to the project website at https://sites.google.com/illinois.edu/mesrnn/home.
CoCAtt: A Cognitive-Conditioned Driver Attention Dataset
Nov 23, 2021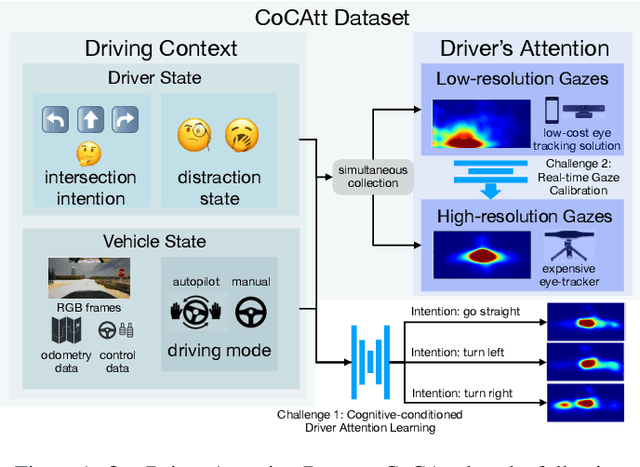

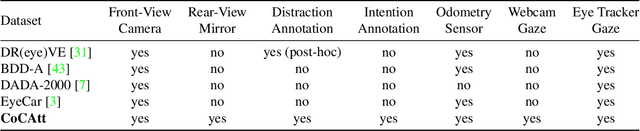
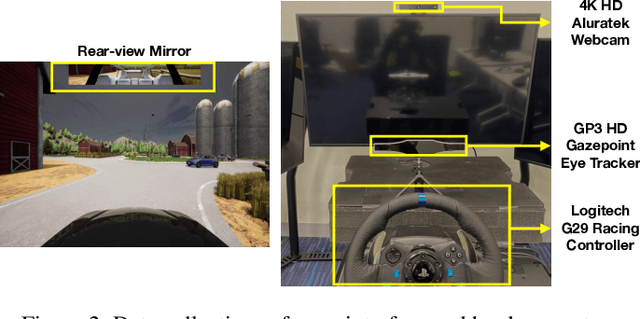
The task of driver attention prediction has drawn considerable interest among researchers in robotics and the autonomous vehicle industry. Driver attention prediction can play an instrumental role in mitigating and preventing high-risk events, like collisions and casualties. However, existing driver attention prediction models neglect the distraction state and intention of the driver, which can significantly influence how they observe their surroundings. To address these issues, we present a new driver attention dataset, CoCAtt (Cognitive-Conditioned Attention). Unlike previous driver attention datasets, CoCAtt includes per-frame annotations that describe the distraction state and intention of the driver. In addition, the attention data in our dataset is captured in both manual and autopilot modes using eye-tracking devices of different resolutions. Our results demonstrate that incorporating the above two driver states into attention modeling can improve the performance of driver attention prediction. To the best of our knowledge, this work is the first to provide autopilot attention data. Furthermore, CoCAtt is currently the largest and the most diverse driver attention dataset in terms of autonomy levels, eye tracker resolutions, and driving scenarios.
Intention-aware Residual Bidirectional LSTM for Long-term Pedestrian Trajectory Prediction
Jun 30, 2020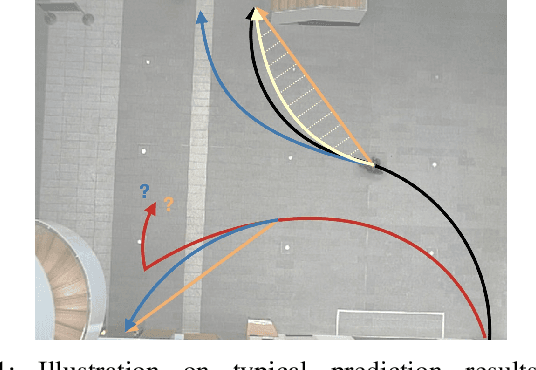
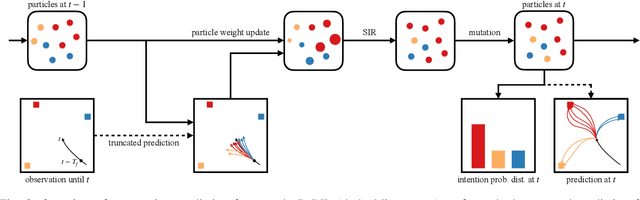
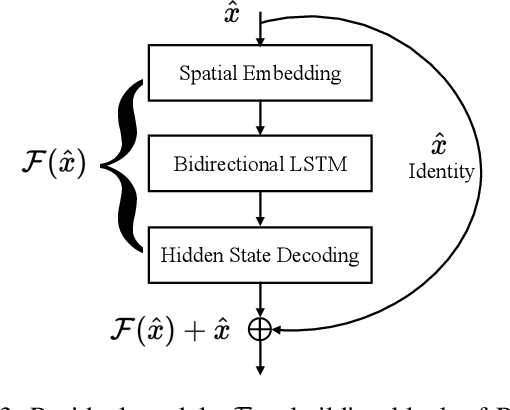
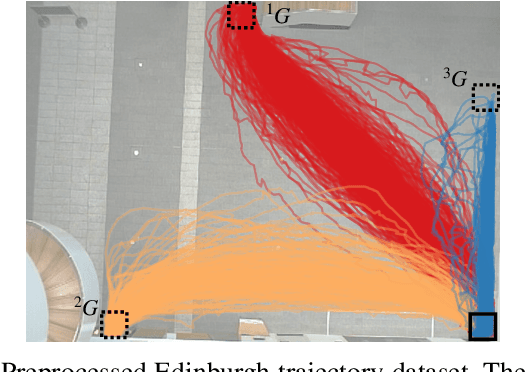
Trajectory prediction is one of the key capabilities for robots to safely navigate and interact with pedestrians. Critical insights from human intention and behavioral patterns need to be effectively integrated into long-term pedestrian behavior forecasting. We present a novel intention-aware motion prediction framework, which consists of a Residual Bidirectional LSTM (ReBiL) and a mutable intention filter. Instead of learning step-wise displacement, we propose learning offset to warp a nominal intention-aware linear prediction, giving residual learning a physical intuition. Our intention filter is inspired by genetic algorithms and particle filtering, where particles mutate intention hypotheses throughout the pedestrian motion with ReBiL as the motion model. Through experiments on a publicly available dataset, we show that our method outperforms baseline approaches and the robust performance of our method is demonstrated under abnormal intention-changing scenarios.