 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoCAtt: A Cognitive-Conditioned Driver Attention Dataset (Supplementary Material)
Jul 08, 2022
The task of driver attention prediction has drawn considerable interest among researchers in robotics and the autonomous vehicle industry. Driver attention prediction can play an instrumental role in mitigating and preventing high-risk events, like collisions and casualties. However, existing driver attention prediction models neglect the distraction state and intention of the driver, which can significantly influence how they observe their surroundings. To address these issues, we present a new driver attention dataset, CoCAtt (Cognitive-Conditioned Attention). Unlike previous driver attention datasets, CoCAtt includes per-frame annotations that describe the distraction state and intention of the driver. In addition, the attention data in our dataset is captured in both manual and autopilot modes using eye-tracking devices of different resolutions. Our results demonstrate that incorporating the above two driver states into attention modeling can improve the performance of driver attention prediction. To the best of our knowledge, this work is the first to provide autopilot attention data. Furthermore, CoCAtt is currently the largest and the most diverse driver attention dataset in terms of autonomy levels, eye tracker resolutions, and driving scenarios. CoCAtt is available for download at https://cocatt-dataset.github.io.
CoCAtt: A Cognitive-Conditioned Driver Attention Dataset
Nov 23, 2021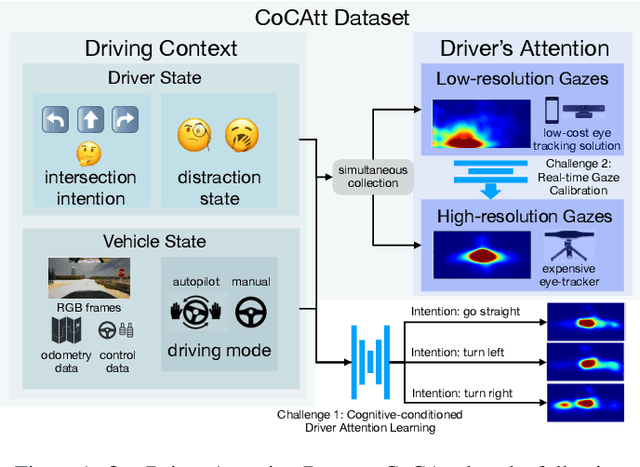

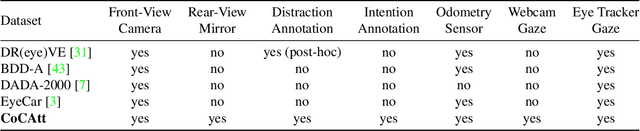
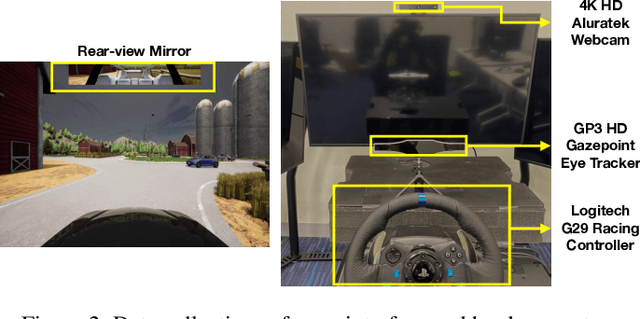
The task of driver attention prediction has drawn considerable interest among researchers in robotics and the autonomous vehicle industry. Driver attention prediction can play an instrumental role in mitigating and preventing high-risk events, like collisions and casualties. However, existing driver attention prediction models neglect the distraction state and intention of the driver, which can significantly influence how they observe their surroundings. To address these issues, we present a new driver attention dataset, CoCAtt (Cognitive-Conditioned Attention). Unlike previous driver attention datasets, CoCAtt includes per-frame annotations that describe the distraction state and intention of the driver. In addition, the attention data in our dataset is captured in both manual and autopilot modes using eye-tracking devices of different resolutions. Our results demonstrate that incorporating the above two driver states into attention modeling can improve the performance of driver attention prediction. To the best of our knowledge, this work is the first to provide autopilot attention data. Furthermore, CoCAtt is currently the largest and the most diverse driver attention dataset in terms of autonomy levels, eye tracker resolutions, and driving scenarios.
Building Mental Models through Preview of Autopilot Behaviors
Apr 12, 2021
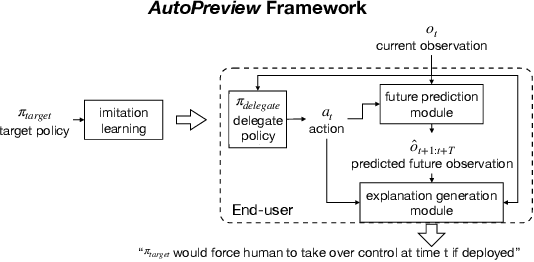
Effective human-vehicle collaboration requires an appropriate un-derstanding of vehicle behavior for safety and trust. Improvingon our prior work by adding a future prediction module, we in-troduce our framework, calledAutoPreview, to enable humans topreview autopilot behaviors prior to direct interaction with thevehicle. Previewing autopilot behavior can help to ensure smoothhuman-vehicle collaboration during the initial exploration stagewith the vehicle. To demonstrate its practicality, we conducted acase study on human-vehicle collaboration and built a prototypeof our framework with the CARLA simulator. Additionally, weconducted a between-subject control experiment (n=10) to studywhether ourAutoPreviewframework can provide a deeper under-standing of autopilot behavior compared to direct interaction. Ourresults suggest that theAutoPreviewframework does, in fact, helpusers understand autopilot behavior and develop appropriate men-tal models
AutoPreview: A Framework for Autopilot Behavior Understanding
Feb 25, 2021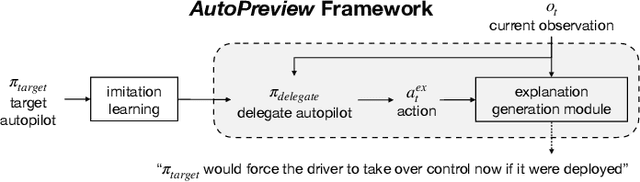
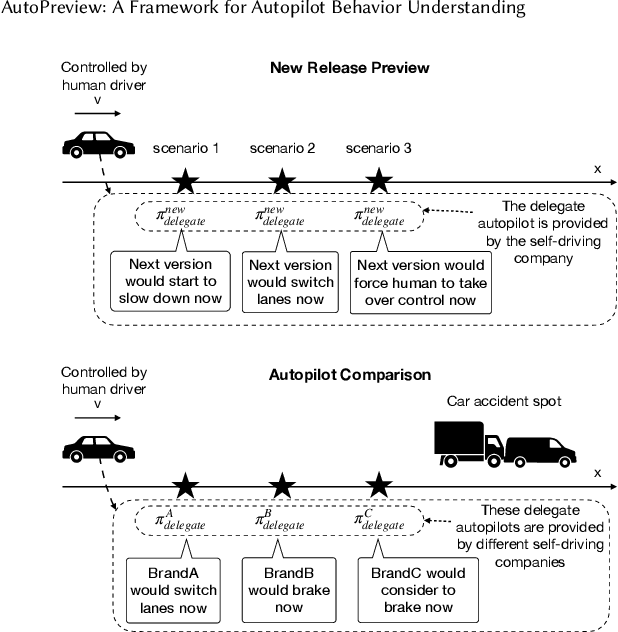
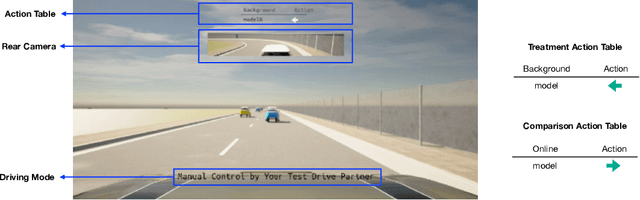

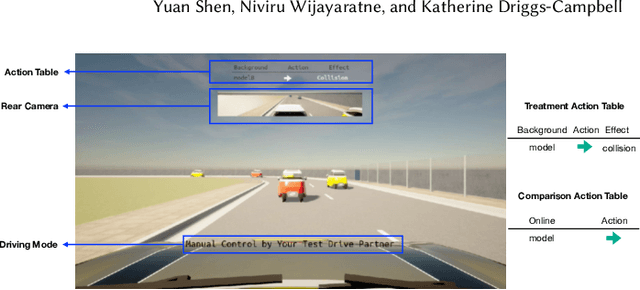
The behavior of self driving cars may differ from people expectations, (e.g. an autopilot may unexpectedly relinquish control). This expectation mismatch can cause potential and existing users to distrust self driving technology and can increase the likelihood of accidents. We propose a simple but effective framework, AutoPreview, to enable consumers to preview a target autopilot potential actions in the real world driving context before deployment. For a given target autopilot, we design a delegate policy that replicates the target autopilot behavior with explainable action representations, which can then be queried online for comparison and to build an accurate mental model. To demonstrate its practicality, we present a prototype of AutoPreview integrated with the CARLA simulator along with two potential use cases of the framework. We conduct a pilot study to investigate whether or not AutoPreview provides deeper understanding about autopilot behavior when experiencing a new autopilot policy for the first time. Our results suggest that the AutoPreview method helps users understand autopilot behavior in terms of driving style comprehension, deployment preference, and exact action timing prediction.
* 7 pages, 5 figures, CHI 2021 Late breaking Work