 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRAGON: A Dialogue-Based Robot for Assistive Navigation with Visual Language Grounding
Jul 13, 2023Persons with visual impairments (PwVI) have difficulties understanding and navigating spaces around them. Current wayfinding technologies either focus solely on navigation or provide limited communication about the environment. Motivated by recent advances in visual-language grounding and semantic navigation, we propose DRAGON, a guiding robot powered by a dialogue system and the ability to associate the environment with natural language. By understanding the commands from the user, DRAGON is able to guide the user to the desired landmarks on the map, describe the environment, and answer questions from visual observations. Through effective utilization of dialogue, the robot can ground the user's free-form descriptions to landmarks in the environment, and give the user semantic information through spoken language. We conduct a user study with blindfolded participants in an everyday indoor environment. Our results demonstrate that DRAGON is able to communicate with the user smoothly, provide a good guiding experience, and connect users with their surrounding environment in an intuitive manner.
Designing a Wayfinding Robot for People with Visual Impairments
Feb 17, 2023People with visual impairments (PwVI) often have difficulties navigating through unfamiliar indoor environments. However, current wayfinding tools are fairly limited. In this short paper, we present our in-progress work on a wayfinding robot for PwVI. The robot takes an audio command from the user that specifies the intended destination. Then, the robot autonomously plans a path to navigate to the goal. We use sensors to estimate the real-time position of the user, which is fed to the planner to improve the safety and comfort of the user. In addition, the robot describes the surroundings to the user periodically to prevent disorientation and potential accidents. We demonstrate the feasibility of our design in a public indoor environment. Finally, we analyze the limitations of our current design, as well as our insights and future work. A demonstration video can be found at https://youtu.be/BS9r5bkIass.
Toward Active Robot-Assisted Feeding with a General-Purpose Mobile Manipulator: Design, Evaluation, and Lessons Learned
Apr 07, 2019
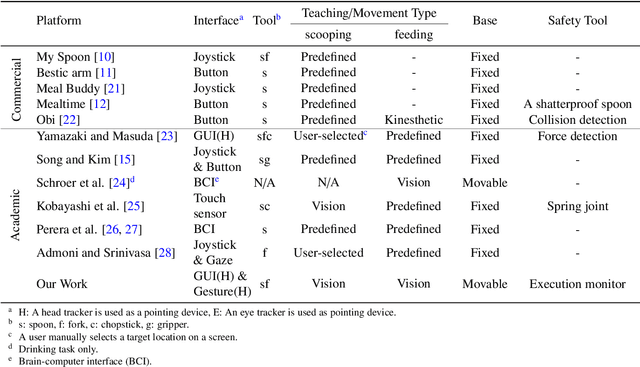
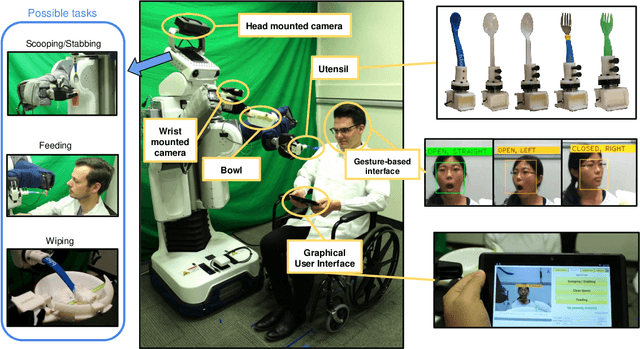

Eating is an essential activity of daily living (ADL) for staying healthy and living at home independently. Although numerous assistive devices have been introduced, many people with disabilities are still restricted from independent eating due to the devices' physical or perceptual limitations. In this work, we introduce a new meal-assistance system using a general-purpose mobile manipulator, a Willow Garage PR2, which has the potential to serve as a versatile form of assistive technology. Our active feeding framework enables the robot to autonomously deliver food to the user's mouth. In detail, our web-based user interface, visually-guided behaviors, and safety tools allow people with severe motor impairments to benefit from the robotic assistance. We evaluated our system with 10 able-bodied participants and 9 people with motor impairments. Both groups of participants successfully ate various foods using the system and reported high rates of success for the system's autonomous behaviors in a laboratory environment. Then, we performed in-home evaluation with Henry Evans, a person with quadriplegia, at his house in California, USA. In general, Henry and the other people who operated the system reported that it was comfortable, safe, and easy-to-use. We discuss learned lessons and design insights through user evaluations.
Proceedings of the Workshop on Social Robots in Therapy: Focusing on Autonomy and Ethical Challenges
Dec 18, 2018
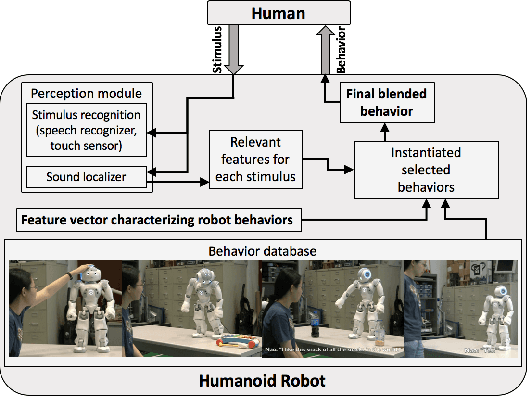
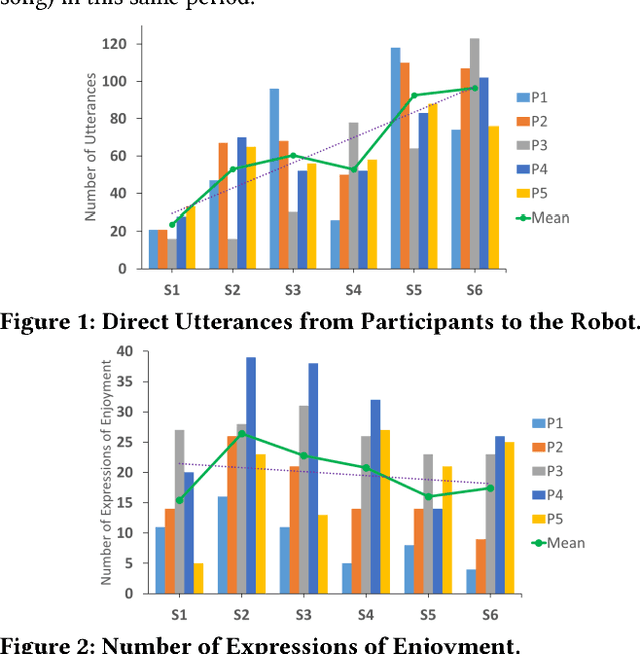
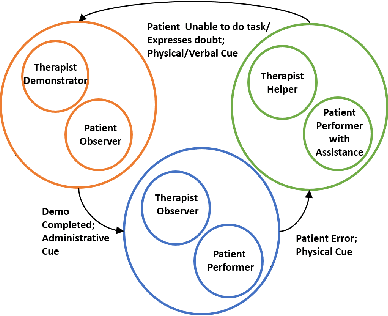
Robot-Assisted Therapy (RAT) has successfully been used in HRI research by including social robots in health-care interventions by virtue of their ability to engage human users both social and emotional dimensions. Research projects on this topic exist all over the globe in the USA, Europe, and Asia. All of these projects have the overall ambitious goal to increase the well-being of a vulnerable population. Typical work in RAT is performed using remote controlled robots; a technique called Wizard-of-Oz (WoZ). The robot is usually controlled, unbeknownst to the patient, by a human operator. However, WoZ has been demonstrated to not be a sustainable technique in the long-term. Providing the robots with autonomy (while remaining under the supervision of the therapist) has the potential to lighten the therapists burden, not only in the therapeutic session itself but also in longer-term diagnostic tasks. Therefore, there is a need for exploring several degrees of autonomy in social robots used in therapy. Increasing the autonomy of robots might also bring about a new set of challenges. In particular, there will be a need to answer new ethical questions regarding the use of robots with a vulnerable population, as well as a need to ensure ethically-compliant robot behaviours. Therefore, in this workshop we want to gather findings and explore which degree of autonomy might help to improve health-care interventions and how we can overcome the ethical challenges inherent to it.