 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntention-aware Residual Bidirectional LSTM for Long-term Pedestrian Trajectory Prediction
Paper and Code
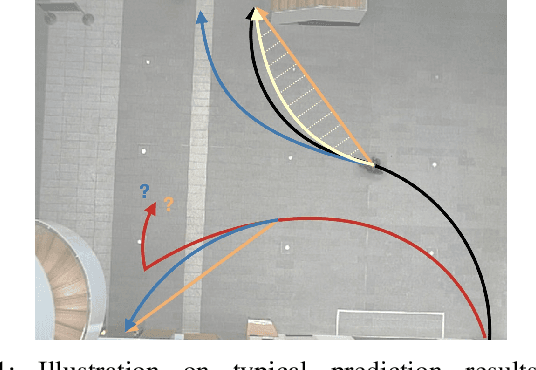
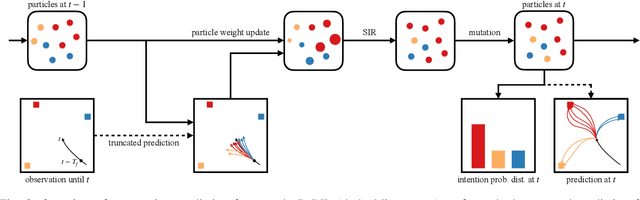
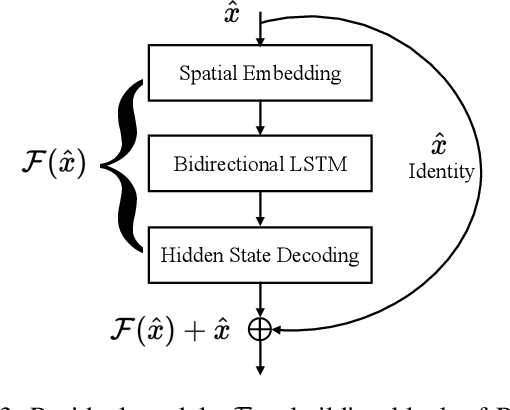
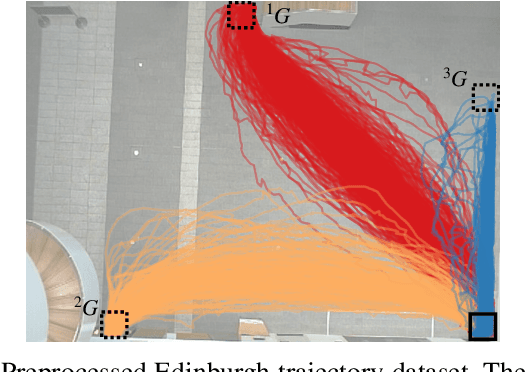
Trajectory prediction is one of the key capabilities for robots to safely navigate and interact with pedestrians. Critical insights from human intention and behavioral patterns need to be effectively integrated into long-term pedestrian behavior forecasting. We present a novel intention-aware motion prediction framework, which consists of a Residual Bidirectional LSTM (ReBiL) and a mutable intention filter. Instead of learning step-wise displacement, we propose learning offset to warp a nominal intention-aware linear prediction, giving residual learning a physical intuition. Our intention filter is inspired by genetic algorithms and particle filtering, where particles mutate intention hypotheses throughout the pedestrian motion with ReBiL as the motion model. Through experiments on a publicly available dataset, we show that our method outperforms baseline approaches and the robust performance of our method is demonstrated under abnormal intention-changing scenarios.