 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Gaussian Trajectory Predictors: Calibrated Uncertainty for Safe Planning
Mar 11, 2026Accurate trajectory prediction is critical for safe autonomous navigation in crowded environments. While many trajectory predictors output Gaussian distributions to represent the multi-modal distribution over future pedestrian positions, the reliability of their confidence levels often remains unaddressed. This limitation can lead to unsafe or overly conservative motion planning when the predictor is integrated with an uncertainty-aware planner. Existing Gaussian trajectory predictors primarily rely on the Negative Log-Likelihood loss, which is prone to predict over- or under-confident distributions, and may compromise downstream planner safety. This paper introduces a novel loss function for calibrating prediction uncertainty which leverages Kernel Density Estimation to estimate the empirical distribution of confidence levels. The proposed formulation enforces consistency with the properties of a Gaussian assumption by explicitly matching the estimated empirical distribution to the Chi-squared distribution. To ensure accurate mean prediction, a Mean Squared Error term is also incorporated in the final loss formulation. Experimental results on real-world trajectory datasets show that our method significantly improves the reliability of confidence levels predicted by different State-Of-The-Art Gaussian trajectory predictors. We also demonstrate the importance of providing planners with reliable probabilistic insights (i.e. calibrated confidence levels) for collision-free navigation in complex scenarios. For this purpose, we integrate Gaussian trajectory predictors trained with our loss function with an uncertainty-aware Model Predictive Control on scenarios extracted from real-world datasets, achieving improved planning performance through calibrated confidence levels.
Hierarchical Intention Tracking with Switching Trees for Real-Time Adaptation to Dynamic Human Intentions during Collaboration
Jun 08, 2025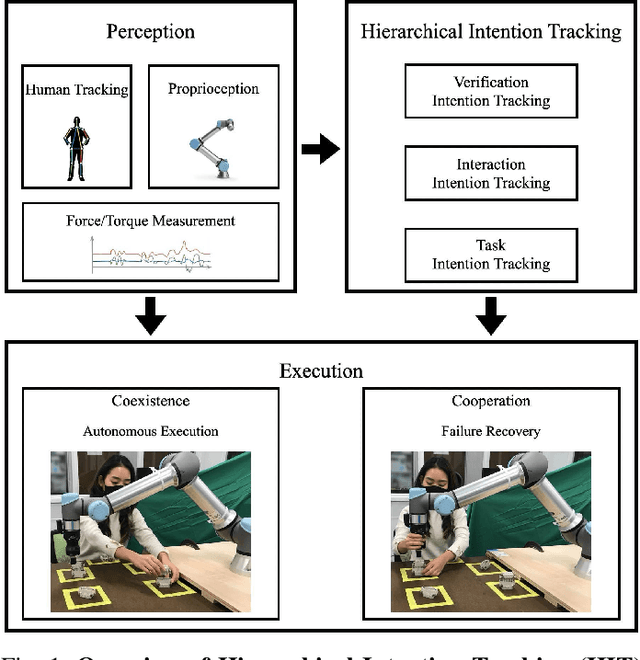
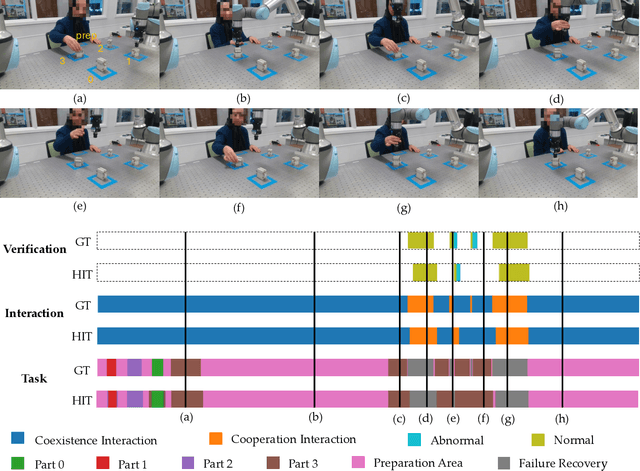
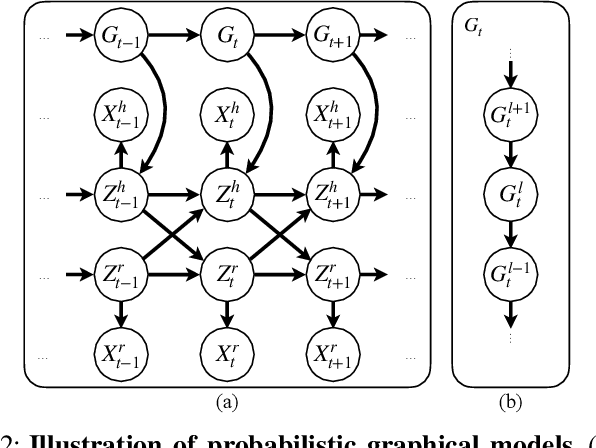
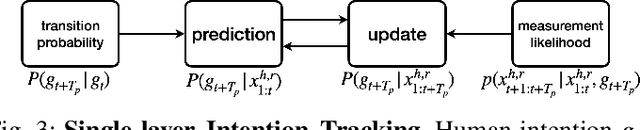
During collaborative tasks, human behavior is guided by multiple levels of intentions that evolve over time, such as task sequence preferences and interaction strategies. To adapt to these changing preferences and promptly correct any inaccurate estimations, collaborative robots must accurately track these dynamic human intentions in real time. We propose a Hierarchical Intention Tracking (HIT) algorithm for collaborative robots to track dynamic and hierarchical human intentions effectively in real time. HIT represents human intentions as intention trees with arbitrary depth, and probabilistically tracks human intentions by Bayesian filtering, upward measurement propagation, and downward posterior propagation across all levels. We develop a HIT-based robotic system that dynamically switches between Interaction-Task and Verification-Task trees for a collaborative assembly task, allowing the robot to effectively coordinate human intentions at three levels: task-level (subtask goal locations), interaction-level (mode of engagement with the robot), and verification-level (confirming or correcting intention recognition). Our user study shows that our HIT-based collaborative robot system surpasses existing collaborative robot solutions by achieving a balance between efficiency, physical workload, and user comfort while ensuring safety and task completion. Post-experiment surveys further reveal that the HIT-based system enhances the user trust and minimizes interruptions to user's task flow through its effective understanding of human intentions across multiple levels.
Interaction-aware Conformal Prediction for Crowd Navigation
Feb 10, 2025During crowd navigation, robot motion plan needs to consider human motion uncertainty, and the human motion uncertainty is dependent on the robot motion plan. We introduce Interaction-aware Conformal Prediction (ICP) to alternate uncertainty-aware robot motion planning and decision-dependent human motion uncertainty quantification. ICP is composed of a trajectory predictor to predict human trajectories, a model predictive controller to plan robot motion with confidence interval radii added for probabilistic safety, a human simulator to collect human trajectory calibration dataset conditioned on the planned robot motion, and a conformal prediction module to quantify trajectory prediction error on the decision-dependent calibration dataset. Crowd navigation simulation experiments show that ICP strikes a good balance of performance among navigation efficiency, social awareness, and uncertainty quantification compared to previous works. ICP generalizes well to navigation tasks under various crowd densities. The fast runtime and efficient memory usage make ICP practical for real-world applications. Code is available at https://github.com/tedhuang96/icp.
HEIGHT: Heterogeneous Interaction Graph Transformer for Robot Navigation in Crowded and Constrained Environments
Nov 19, 2024



We study the problem of robot navigation in dense and interactive crowds with environmental constraints such as corridors and furniture. Previous methods fail to consider all types of interactions among agents and obstacles, leading to unsafe and inefficient robot paths. In this article, we leverage a graph-based representation of crowded and constrained scenarios and propose a structured framework to learn robot navigation policies with deep reinforcement learning. We first split the representations of different components in the environment and propose a heterogeneous spatio-temporal (st) graph to model distinct interactions among humans, robots, and obstacles. Based on the heterogeneous st-graph, we propose HEIGHT, a novel navigation policy network architecture with different components to capture heterogeneous interactions among entities through space and time. HEIGHT utilizes attention mechanisms to prioritize important interactions and a recurrent network to track changes in the dynamic scene over time, encouraging the robot to avoid collisions adaptively. Through extensive simulation and real-world experiments, we demonstrate that HEIGHT outperforms state-of-the-art baselines in terms of success and efficiency in challenging navigation scenarios. Furthermore, we demonstrate that our pipeline achieves better zero-shot generalization capability than previous works when the densities of humans and obstacles change. More videos are available at https://sites.google.com/view/crowdnav-height/home.
Topology-Guided ORCA: Smooth Multi-Agent Motion Planning in Constrained Environments
Jul 23, 2024

We present Topology-Guided ORCA as an alternative simulator to replace ORCA for planning smooth multi-agent motions in environments with static obstacles. Despite the impressive performance in simulating multi-agent crowd motion in free space, ORCA encounters a significant challenge in navigating the agents with the presence of static obstacles. ORCA ignores static obstacles until an agent gets too close to an obstacle, and the agent will get stuck if the obstacle intercepts an agent's path toward the goal. To address this challenge, Topology-Guided ORCA constructs a graph to represent the topology of the traversable region of the environment. We use a path planner to plan a path of waypoints that connects each agent's start and goal positions. The waypoints are used as a sequence of goals to guide ORCA. The experiments of crowd simulation in constrained environments show that our method outperforms ORCA in terms of generating smooth and natural motions of multiple agents in constrained environments, which indicates great potential of Topology-Guided ORCA for serving as an effective simulator for training constrained social navigation policies.