 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Legible to Inscrutable Trajectories: (Il)legible Motion Planning Accounting for Multiple Observers
Feb 09, 2026In cooperative environments, such as in factories or assistive scenarios, it is important for a robot to communicate its intentions to observers, who could be either other humans or robots. A legible trajectory allows an observer to quickly and accurately predict an agent's intention. In adversarial environments, such as in military operations or games, it is important for a robot to not communicate its intentions to observers. An illegible trajectory leads an observer to incorrectly predict the agent's intention or delays when an observer is able to make a correct prediction about the agent's intention. However, in some environments there are multiple observers, each of whom may be able to see only part of the environment, and each of whom may have different motives. In this work, we introduce the Mixed-Motive Limited-Observability Legible Motion Planning (MMLO-LMP) problem, which requires a motion planner to generate a trajectory that is legible to observers with positive motives and illegible to observers with negative motives while also considering the visibility limitations of each observer. We highlight multiple strategies an agent can take while still achieving the problem objective. We also present DUBIOUS, a trajectory optimizer that solves MMLO-LMP. Our results show that DUBIOUS can generate trajectories that balance legibility with the motives and limited visibility regions of the observers. Future work includes many variations of MMLO-LMP, including moving observers and observer teaming.
Topology-Guided ORCA: Smooth Multi-Agent Motion Planning in Constrained Environments
Jul 23, 2024

We present Topology-Guided ORCA as an alternative simulator to replace ORCA for planning smooth multi-agent motions in environments with static obstacles. Despite the impressive performance in simulating multi-agent crowd motion in free space, ORCA encounters a significant challenge in navigating the agents with the presence of static obstacles. ORCA ignores static obstacles until an agent gets too close to an obstacle, and the agent will get stuck if the obstacle intercepts an agent's path toward the goal. To address this challenge, Topology-Guided ORCA constructs a graph to represent the topology of the traversable region of the environment. We use a path planner to plan a path of waypoints that connects each agent's start and goal positions. The waypoints are used as a sequence of goals to guide ORCA. The experiments of crowd simulation in constrained environments show that our method outperforms ORCA in terms of generating smooth and natural motions of multiple agents in constrained environments, which indicates great potential of Topology-Guided ORCA for serving as an effective simulator for training constrained social navigation policies.
LIT: Large Language Model Driven Intention Tracking for Proactive Human-Robot Collaboration -- A Robot Sous-Chef Application
Jun 19, 2024


Large Language Models (LLM) and Vision Language Models (VLM) enable robots to ground natural language prompts into control actions to achieve tasks in an open world. However, when applied to a long-horizon collaborative task, this formulation results in excessive prompting for initiating or clarifying robot actions at every step of the task. We propose Language-driven Intention Tracking (LIT), leveraging LLMs and VLMs to model the human user's long-term behavior and to predict the next human intention to guide the robot for proactive collaboration. We demonstrate smooth coordination between a LIT-based collaborative robot and the human user in collaborative cooking tasks.
Hierarchical Annotated Skeleton-Guided Tree-based Motion Planning
Sep 19, 2023



We present a hierarchical tree-based motion planning strategy, HAS-RRT, guided by the workspace skeleton to solve motion planning problems in robotics and computational biology. Relying on the information about the connectivity of the workspace and the ranking of available paths in the workspace, the strategy prioritizes paths indicated by the workspace guidance to find a valid motion plan for the moving object efficiently. In instances of suboptimal guidance, the strategy adapts its reliance on the guidance by hierarchically reverting to local exploration of the planning space. We offer an extensive comparative analysis against other tree-based planning strategies and demonstrate that HAS-RRT reliably and efficiently finds low-cost paths. In contrast to methods prone to inconsistent performance across different environments or reliance on specific parameters, HAS-RRT is robust to workspace variability.
Hierarchical Planning with Annotated Skeleton Guidance
Jun 23, 2022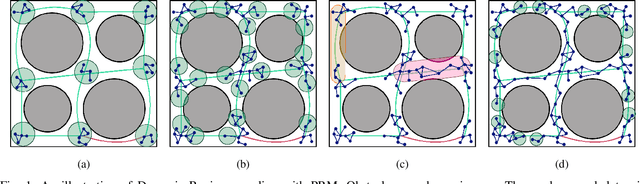
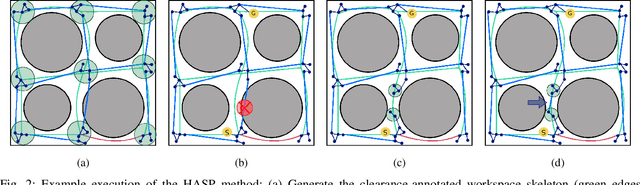
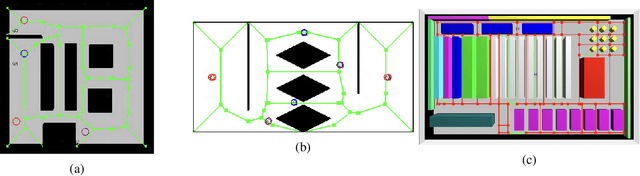
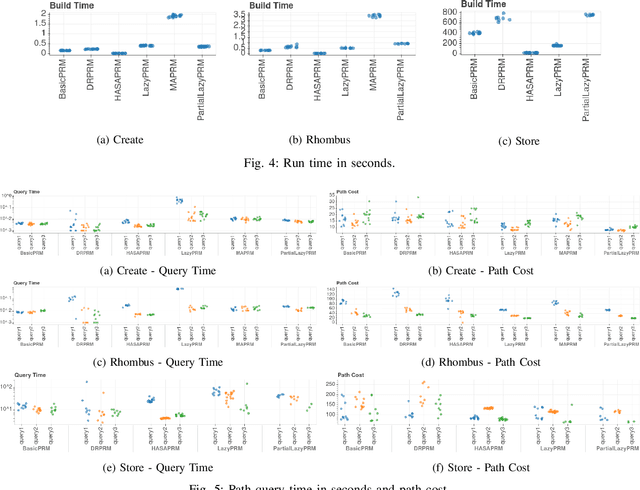
We present a hierarchical skeleton-guided motion planning algorithm to guide mobile robots. A good skeleton maps the connectivity of the subspace of c-space containing significant degrees of freedom and is able to guide the planner to find the desired solutions fast. However, sometimes the skeleton does not closely represent the free c-space, which often misleads current skeleton-guided planners. The hierarchical skeleton-guided planning strategy gradually relaxes its reliance on the workspace skeleton as C space is sampled, thereby incrementally returning a sub-optimal path, a feature that is not guaranteed in the standard skeleton-guided algorithm. Experimental comparisons to the standard skeleton-guided planners and other lazy planning strategies show significant improvement in roadmap construction run time while maintaining path quality for multi-query problems in cluttered environments.