 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Annotated Skeleton-Guided Tree-based Motion Planning
Sep 19, 2023



We present a hierarchical tree-based motion planning strategy, HAS-RRT, guided by the workspace skeleton to solve motion planning problems in robotics and computational biology. Relying on the information about the connectivity of the workspace and the ranking of available paths in the workspace, the strategy prioritizes paths indicated by the workspace guidance to find a valid motion plan for the moving object efficiently. In instances of suboptimal guidance, the strategy adapts its reliance on the guidance by hierarchically reverting to local exploration of the planning space. We offer an extensive comparative analysis against other tree-based planning strategies and demonstrate that HAS-RRT reliably and efficiently finds low-cost paths. In contrast to methods prone to inconsistent performance across different environments or reliance on specific parameters, HAS-RRT is robust to workspace variability.
Evaluating Guiding Spaces for Motion Planning
Oct 16, 2022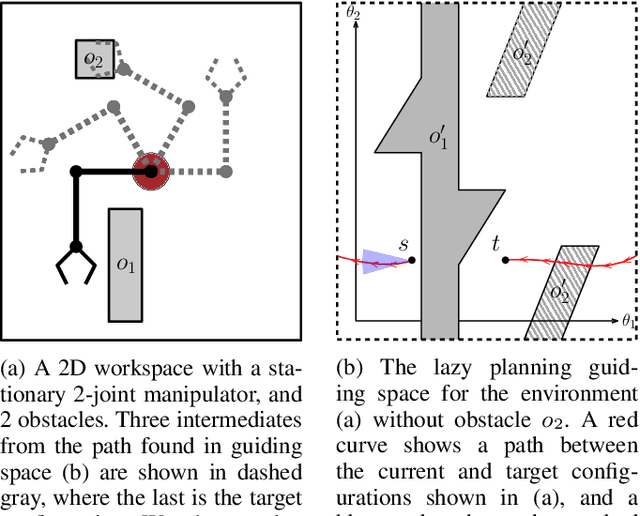
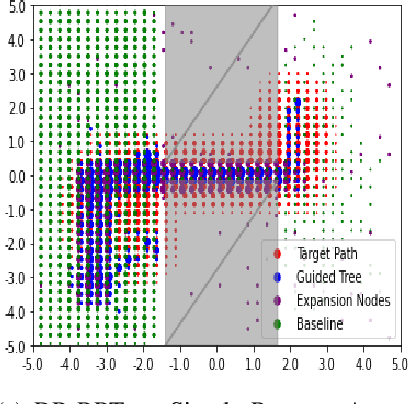
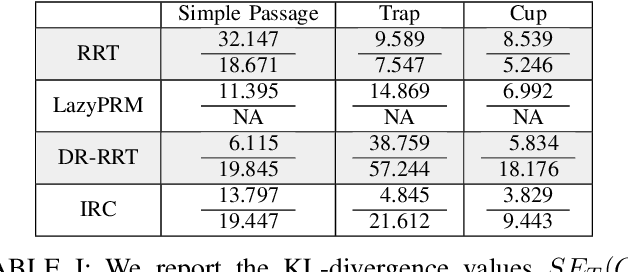
Randomized sampling based algorithms are widely used in robot motion planning due to the problem's intractability, and are experimentally effective on a wide range of problem instances. Most variants do not sample uniformly at random, and instead bias their sampling using various heuristics for determining which samples will provide more information, or are more likely to participate in the final solution. In this work, we define the \emph{motion planning guiding space}, which encapsulates many seemingly distinct prior works under the same framework. In addition, we suggest an information theoretic method to evaluate guided planning which places the focus on the quality of the resulting biased sampling. Finally, we analyze several motion planning algorithms in order to demonstrate the applicability of our definition and its evaluation.
Scalable Multi-robot Motion Planning for Congested Environments Using Topological Guidance
Oct 13, 2022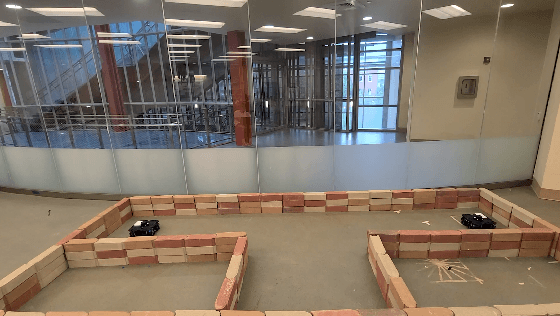

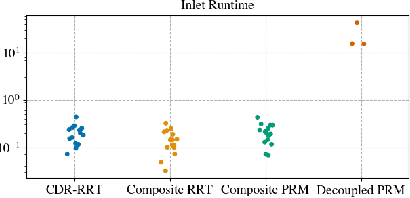
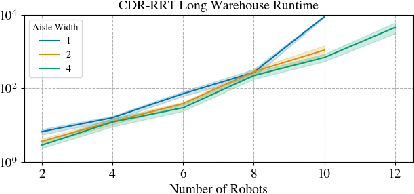
Multi-robot motion planning (MRMP) is the problem of finding collision-free paths for a set of robots in a continuous state space. The difficulty of MRMP increases with the number of robots due to the increased potential for collisions between robots. This problem is exacerbated in environments with narrow passages that robots must pass through, like warehouses. In single-robot settings, topology-guided motion planning methods have shown increased performance in these constricted environments. We adapt an existing topology-guided single-robot motion planning method to the multi-robot domain, introducing topological guidance for the composite space. We demonstrate our method's ability to efficiently plan paths in complex environments with many narrow passages, scaling to robot teams of size up to five times larger than existing methods in this class of problems. By leveraging knowledge of the topology of the environment, we also find higher quality solutions than other methods.
Hierarchical Planning with Annotated Skeleton Guidance
Jun 23, 2022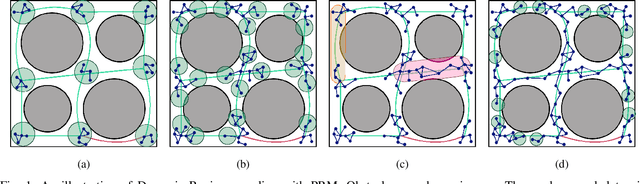
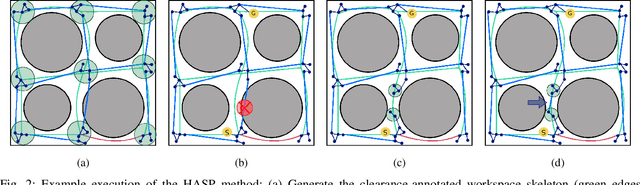
We present a hierarchical skeleton-guided motion planning algorithm to guide mobile robots. A good skeleton maps the connectivity of the subspace of c-space containing significant degrees of freedom and is able to guide the planner to find the desired solutions fast. However, sometimes the skeleton does not closely represent the free c-space, which often misleads current skeleton-guided planners. The hierarchical skeleton-guided planning strategy gradually relaxes its reliance on the workspace skeleton as C space is sampled, thereby incrementally returning a sub-optimal path, a feature that is not guaranteed in the standard skeleton-guided algorithm. Experimental comparisons to the standard skeleton-guided planners and other lazy planning strategies show significant improvement in roadmap construction run time while maintaining path quality for multi-query problems in cluttered environments.
Annotated-skeleton Biased Motion Planning for Faster Relevant Region Discovery
Mar 04, 2020
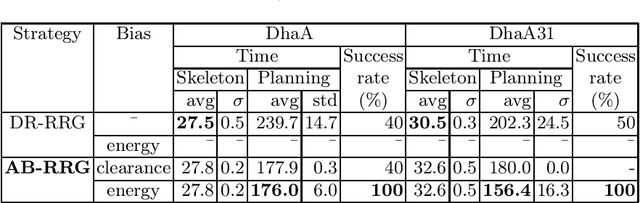
Motion planning algorithms often leverage topological information about the environment to improve planner performance. However, these methods often focus only on the environment's connectivity while ignoring other properties such as obstacle clearance, terrain conditions, and resource accessibility. We present a method that augments a skeleton representing the workspace topology with such information to guide a sampling-based motion planner to rapidly discover regions most relevant to the problem at hand. Our approach decouples guidance and planning, making it possible for basic planning algorithms to find desired paths earlier in the planning process. We demonstrate the efficacy of our approach in both robotics problems and applications in drug design. Our method is able to produce desirable paths quickly with no change to the underlying planner.
Proceedings of the 1st International Workshop on Robot Learning and Planning
Oct 08, 2016

Proceedings of the 1st International Workshop on Robot Learning and Planning (RLP 2016)