 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnnotated-skeleton Biased Motion Planning for Faster Relevant Region Discovery
Mar 04, 2020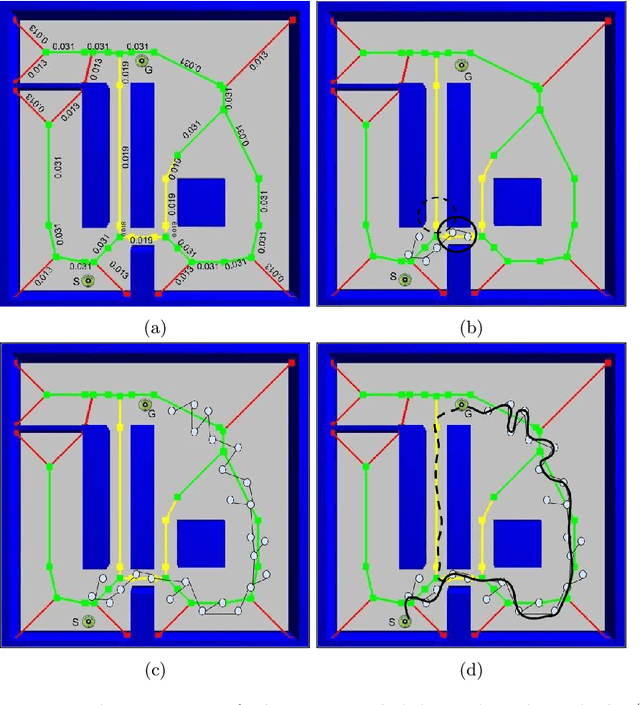
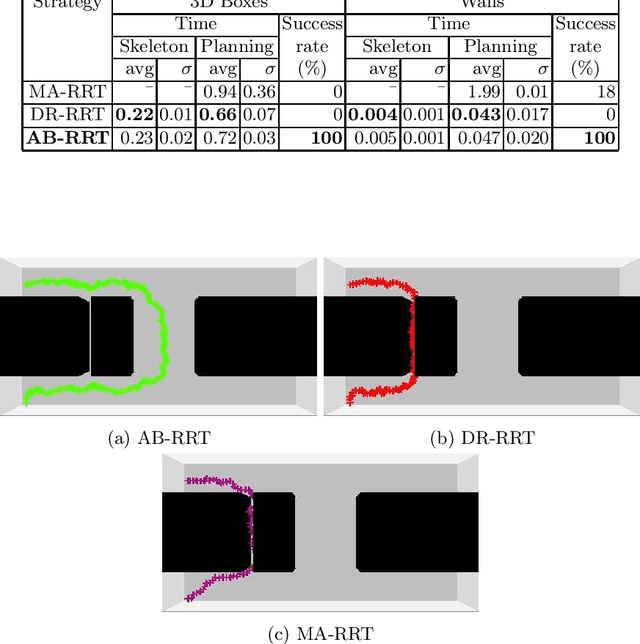
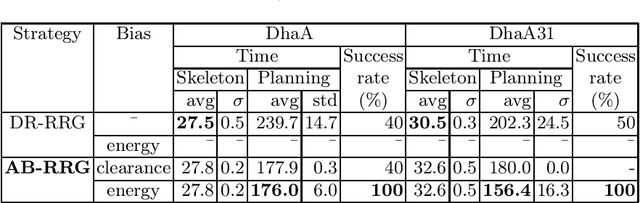
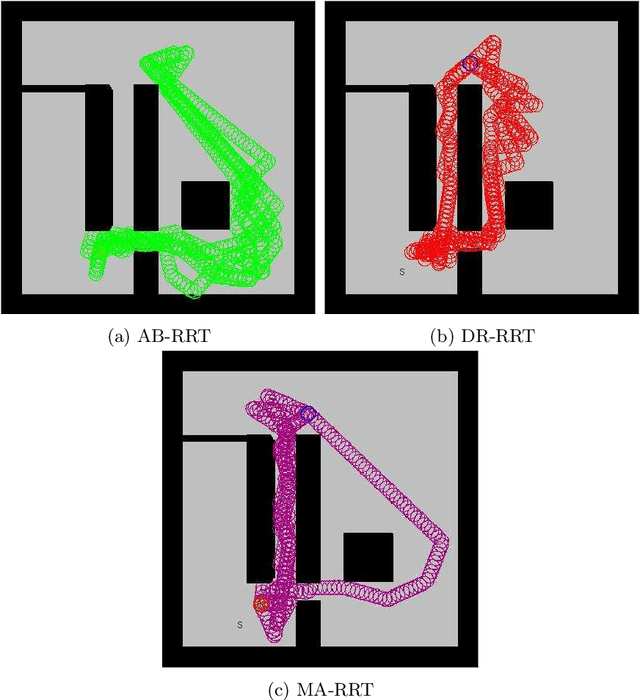
Motion planning algorithms often leverage topological information about the environment to improve planner performance. However, these methods often focus only on the environment's connectivity while ignoring other properties such as obstacle clearance, terrain conditions, and resource accessibility. We present a method that augments a skeleton representing the workspace topology with such information to guide a sampling-based motion planner to rapidly discover regions most relevant to the problem at hand. Our approach decouples guidance and planning, making it possible for basic planning algorithms to find desired paths earlier in the planning process. We demonstrate the efficacy of our approach in both robotics problems and applications in drug design. Our method is able to produce desirable paths quickly with no change to the underlying planner.