 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Impact of Time Step Frequency on the Realism of Robotic Manipulation Simulation for Objects of Different Scales
Oct 12, 2023This work evaluates the impact of time step frequency and component scale on robotic manipulation simulation accuracy. Increasing the time step frequency for small-scale objects is shown to improve simulation accuracy. This simulation, demonstrating pre-assembly part picking for two object geometries, serves as a starting point for discussing how to improve Sim2Real transfer in robotic assembly processes.
Insights from an Industrial Collaborative Assembly Project: Lessons in Research and Collaboration
May 28, 2022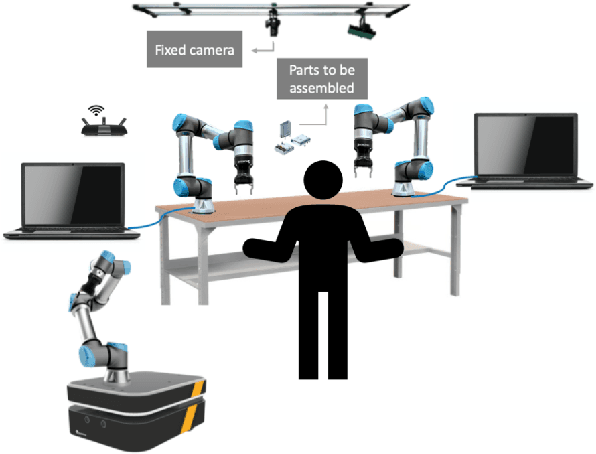
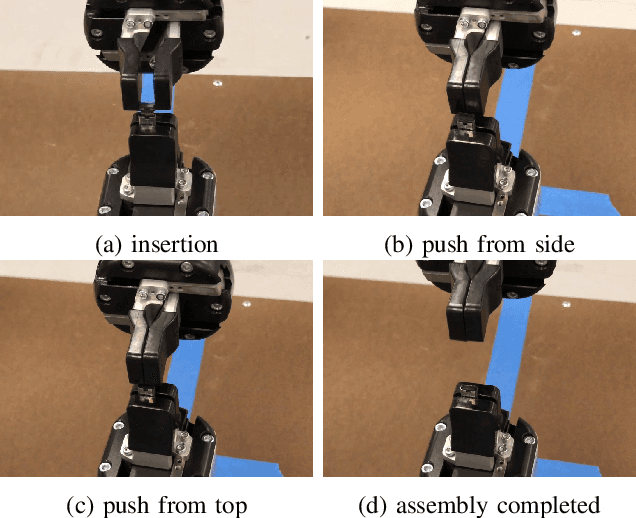
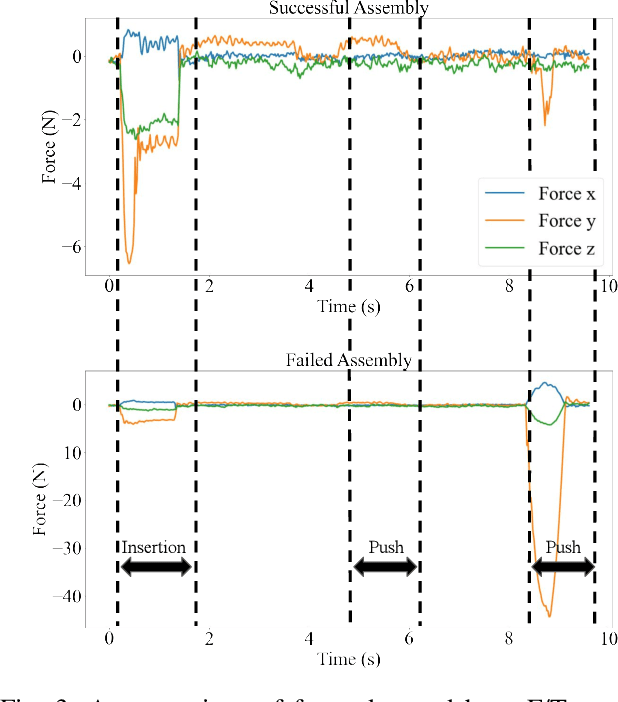
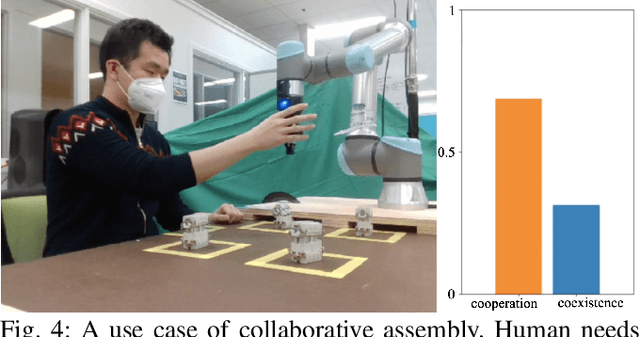
Significant progress in robotics reveals new opportunities to advance manufacturing. Next-generation industrial automation will require both integration of distinct robotic technologies and their application to challenging industrial environments. This paper presents lessons from a collaborative assembly project between three academic research groups and an industry partner. The goal of the project is to develop a flexible, safe, and productive manufacturing cell for sub-centimeter precision assembly. Solving this problem in a high-mix, low-volume production line motivates multiple research thrusts in robotics. This work identifies new directions in collaborative robotics for industrial applications and offers insight toward strengthening collaborations between institutions in academia and industry on the development of new technologies.