 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Intention Tracking for Robust Human-Robot Collaboration in Industrial Assembly Tasks
Paper and Code
Mar 17, 2022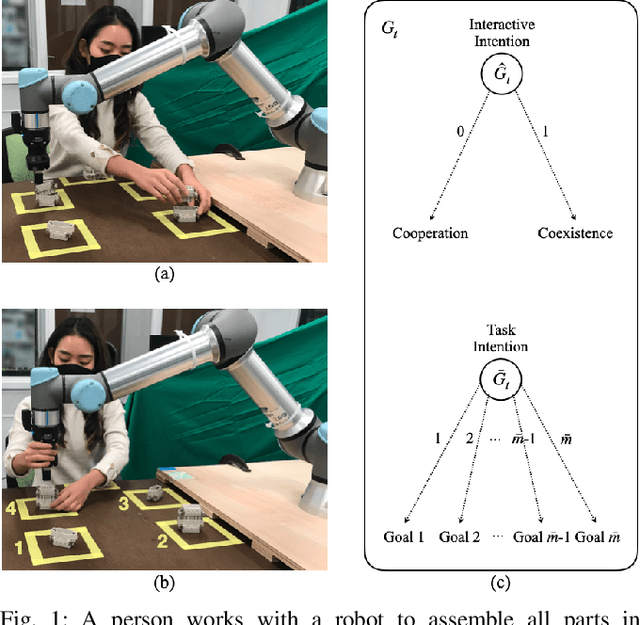
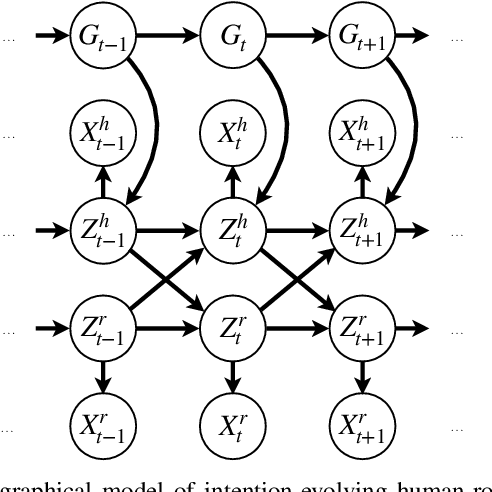
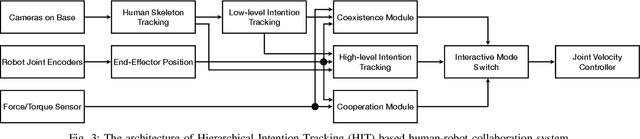

Collaborative robots require effective intention estimation to safely and smoothly work with humans in less structured tasks such as industrial assembly. During these tasks, human intention continuously changes across multiple steps, and is composed of a hierarchy including high-level interactive intention and low-level task intention. Thus, we propose the concept of intention tracking and introduce a collaborative robot system with a hierarchical framework that concurrently tracks intentions at both levels by observing force/torque measurements, robot state sequences, and tracked human trajectories. The high-level intention estimate enables the robot to both (1) safely avoid collision with the human to minimize interruption and (2) cooperatively approach the human and help recover from an assembly failure through admittance control. The low-level intention estimate provides the robot with task-specific information (e.g., which part the human is working on) for concurrent task execution. We implement the system on a UR5e robot, and demonstrate robust, seamless and ergonomic collaboration between the human and the robot in an assembly use case through an ablative pilot study.