 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlying Hand: End-Effector-Centric Framework for Versatile Aerial Manipulation Teleoperation and Policy Learning
Apr 14, 2025Aerial manipulation has recently attracted increasing interest from both industry and academia. Previous approaches have demonstrated success in various specific tasks. However, their hardware design and control frameworks are often tightly coupled with task specifications, limiting the development of cross-task and cross-platform algorithms. Inspired by the success of robot learning in tabletop manipulation, we propose a unified aerial manipulation framework with an end-effector-centric interface that decouples high-level platform-agnostic decision-making from task-agnostic low-level control. Our framework consists of a fully-actuated hexarotor with a 4-DoF robotic arm, an end-effector-centric whole-body model predictive controller, and a high-level policy. The high-precision end-effector controller enables efficient and intuitive aerial teleoperation for versatile tasks and facilitates the development of imitation learning policies. Real-world experiments show that the proposed framework significantly improves end-effector tracking accuracy, and can handle multiple aerial teleoperation and imitation learning tasks, including writing, peg-in-hole, pick and place, changing light bulbs, etc. We believe the proposed framework provides one way to standardize and unify aerial manipulation into the general manipulation community and to advance the field. Project website: https://lecar-lab.github.io/flying_hand/.
Flying Calligrapher: Contact-Aware Motion and Force Planning and Control for Aerial Manipulation
Jul 08, 2024



Aerial manipulation has gained interest in completing high-altitude tasks that are challenging for human workers, such as contact inspection and defect detection, etc. Previous research has focused on maintaining static contact points or forces. This letter addresses a more general and dynamic task: simultaneously tracking time-varying contact force in the surface normal direction and motion trajectories on tangential surfaces. We propose a pipeline that includes a contact-aware trajectory planner to generate dynamically feasible trajectories, and a hybrid motion-force controller to track such trajectories. We demonstrate the approach in an aerial calligraphy task using a novel sponge pen design as the end-effector, whose stroke width is proportional to the contact force. Additionally, we develop a touchscreen interface for flexible user input. Experiments show our method can effectively draw diverse letters, achieving an IoU of 0.59 and an end-effector position (force) tracking RMSE of 2.9 cm (0.7 N). Website: https://xiaofeng-guo.github.io/flying-calligrapher/
Aerial Interaction with Tactile Sensing
Sep 29, 2023While autonomous Uncrewed Aerial Vehicles (UAVs) have grown rapidly, most applications only focus on passive visual tasks. Aerial interaction aims to execute tasks involving physical interactions, which offers a way to assist humans in high-risk, high-altitude operations, thereby reducing cost, time, and potential hazards. The coupled dynamics between the aerial vehicle and manipulator, however, pose challenges for precision control. Previous research has typically employed either position control, which often fails to meet mission accuracy, or force control using expensive, heavy, and cumbersome force/torque sensors that also lack local semantic information. Conversely, tactile sensors, being both cost-effective and lightweight, are capable of sensing contact information including force distribution, as well as recognizing local textures. Existing work on tactile sensing mainly focuses on tabletop manipulation tasks within a quasi-static process. In this paper, we pioneer the use of vision-based tactile sensors on a fully-actuated UAV to improve the accuracy of the more dynamic aerial manipulation tasks. We introduce a pipeline utilizing tactile feedback for real-time force tracking via a hybrid motion-force controller and a method for wall texture detection during aerial interactions. Our experiments demonstrate that our system can effectively replace or complement traditional force/torque sensors, improving flight performance by approximately 16% in position tracking error when using the fused force estimate compared to relying on a single sensor. Our tactile sensor achieves 93.4% accuracy in real-time texture recognition and 100% post-contact. To the best of our knowledge, this is the first work to incorporate a vision-based tactile sensor into aerial interaction tasks.
Image-based Visual Servo Control for Aerial Manipulation Using a Fully-Actuated UAV
Jun 28, 2023



Using Unmanned Aerial Vehicles (UAVs) to perform high-altitude manipulation tasks beyond just passive visual application can reduce the time, cost, and risk of human workers. Prior research on aerial manipulation has relied on either ground truth state estimate or GPS/total station with some Simultaneous Localization and Mapping (SLAM) algorithms, which may not be practical for many applications close to infrastructure with degraded GPS signal or featureless environments. Visual servo can avoid the need to estimate robot pose. Existing works on visual servo for aerial manipulation either address solely end-effector position control or rely on precise velocity measurement and pre-defined visual visual marker with known pattern. Furthermore, most of previous work used under-actuated UAVs, resulting in complicated mechanical and hence control design for the end-effector. This paper develops an image-based visual servo control strategy for bridge maintenance using a fully-actuated UAV. The main components are (1) a visual line detection and tracking system, (2) a hybrid impedance force and motion control system. Our approach does not rely on either robot pose/velocity estimation from an external localization system or pre-defined visual markers. The complexity of the mechanical system and controller architecture is also minimized due to the fully-actuated nature. Experiments show that the system can effectively execute motion tracking and force holding using only the visual guidance for the bridge painting. To the best of our knowledge, this is one of the first studies on aerial manipulation using visual servo that is capable of achieving both motion and force control without the need of external pose/velocity information or pre-defined visual guidance.
A Simulator for Fully-Actuated UAVs
May 12, 2023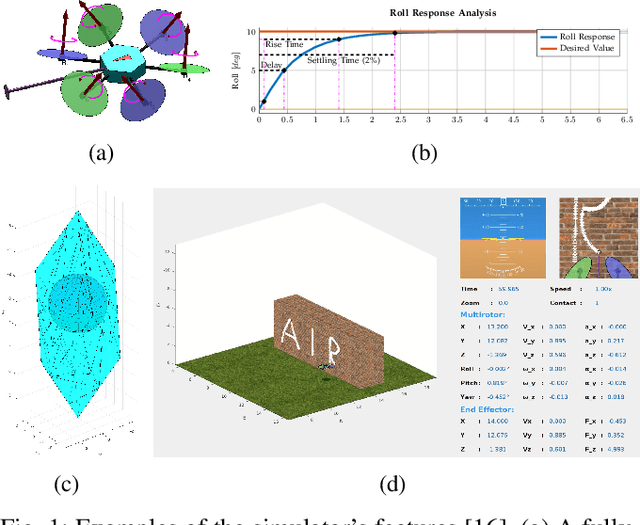
This workshop paper presents the challenges we encountered when simulating fully-actuated Unmanned Aerial Vehicles (UAVs) for our research and the solutions we developed to overcome the challenges. We describe the ARCAD simulator that has helped us rapidly implement and test different controllers ranging from Hybrid Force-Position Controllers to advanced Model Predictive Path Integrals and has allowed us to analyze the design and behavior of different fully-actuated UAVs. We used the simulator to enable real-world deployments of our fully-actuated UAV fleet for different applications. The simulator is further extended to support the physical interaction of UAVs with their environment and allow more UAV designs, such as hybrid VTOLs. The code for the simulator can be accessed from https://github.com/keipour/aircraft-simulator-matlab.
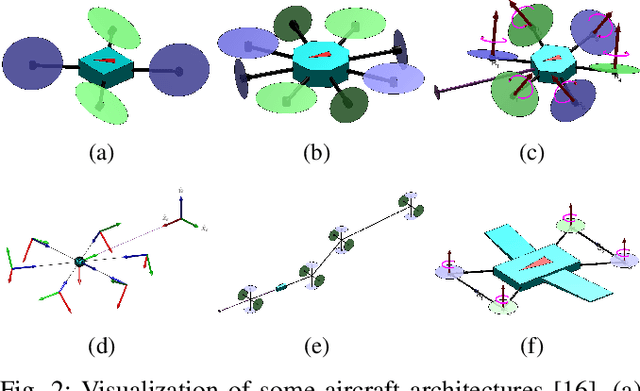
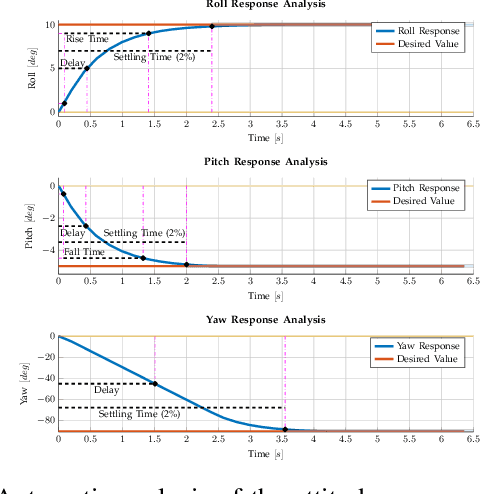
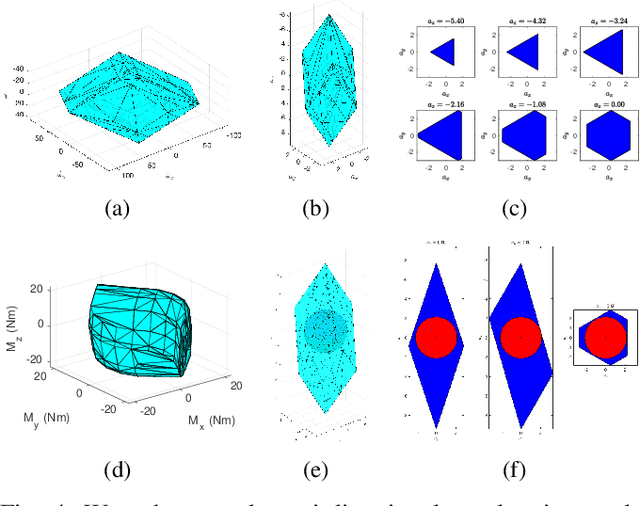
UAS Simulator for Modeling, Analysis and Control in Free Flight and Physical Interaction
Dec 06, 2022

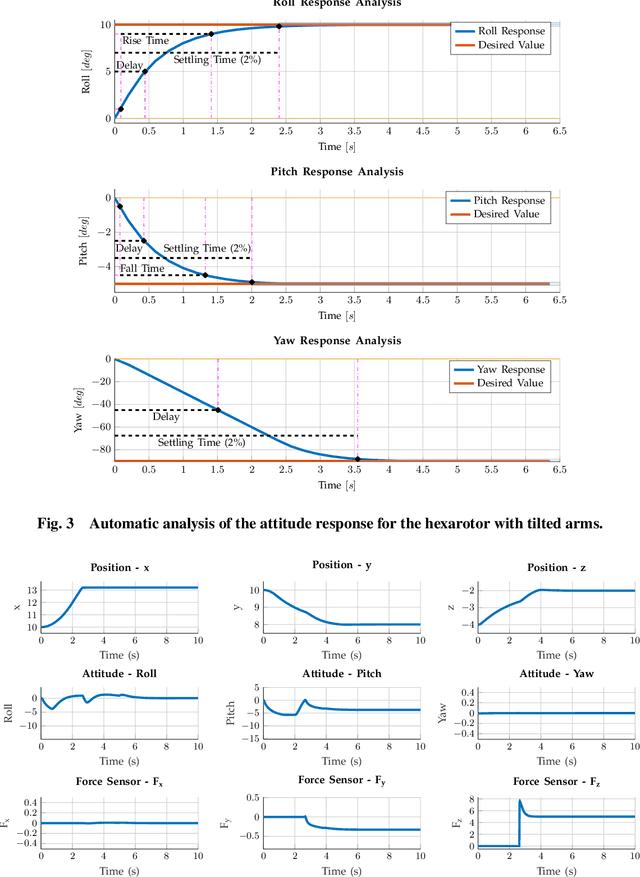

This paper presents the ARCAD simulator for the rapid development of Unmanned Aerial Systems (UAS), including underactuated and fully-actuated multirotors, fixed-wing aircraft, and Vertical Take-Off and Landing (VTOL) hybrid vehicles. The simulator is designed to accelerate these aircraft's modeling and control design. It provides various analyses of the design and operation, such as wrench-set computation, controller response, and flight optimization. In addition to simulating free flight, it can simulate the physical interaction of the aircraft with its environment. The simulator is written in MATLAB to allow rapid prototyping and is capable of generating graphical visualization of the aircraft and the environment in addition to generating the desired plots. It has been used to develop several real-world multirotor and VTOL applications. The source code is available at https://github.com/keipour/aircraft-simulator-matlab.
VTOL Failure Detection and Recovery by Utilizing Redundancy
Jun 01, 2022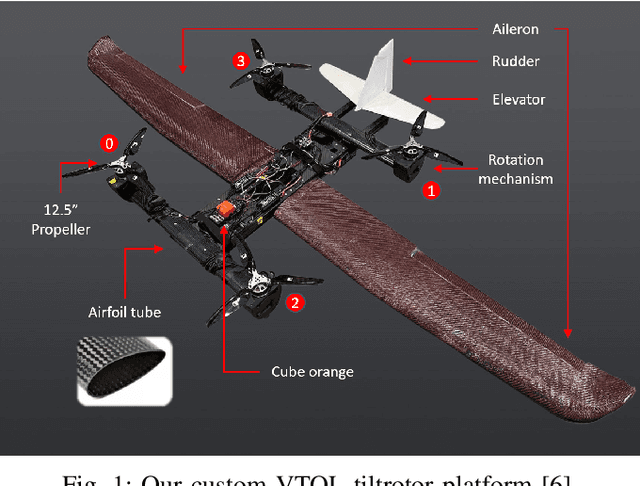
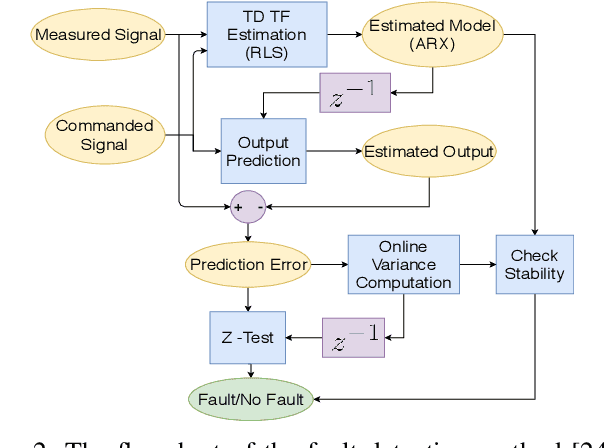
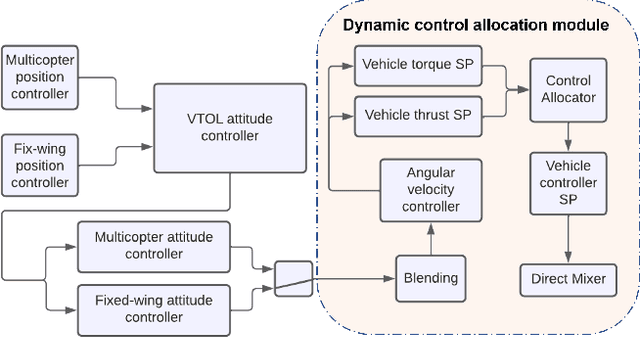
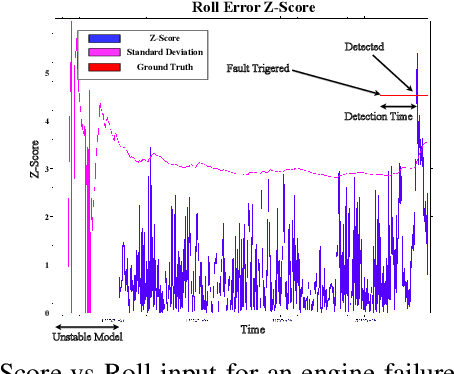
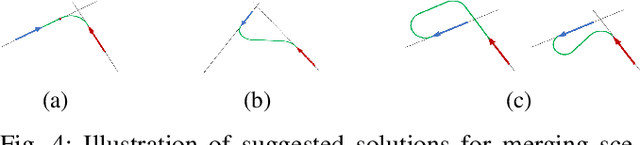
Offering vertical take-off and landing (VTOL) capabilities and the ability to travel great distances are crucial for Urban Air Mobility (UAM) vehicles. These capabilities make hybrid VTOLs the clear front-runners among UAM platforms. On the other hand, concerns regarding the safety and reliability of autonomous aircraft have grown in response to the recent growth in aerial vehicle usage. As a result, monitoring the aircraft status to report any failures and recovering to prevent the loss of control when a failure happens are becoming increasingly important. Hybrid VTOLs can withstand some degree of actuator failure due to their intrinsic redundancy. Their aerodynamic performance, design, modeling, and control have all been addressed in the previous studies. However, research on their potential fault tolerance is still a less investigated field. In this workshop, we will present a summary of our work on aircraft fault detection and the recovery of our hybrid VTOL. First, we will go over our real-time aircraft-independent system for detecting actuator failures and abnormal behaviors. Then, in the context of our custom tiltrotor VTOL aircraft design, we talk about our optimization-based control allocation system, which utilizes the vehicle's configuration redundancy to recover from different actuation failures. Finally, we explore the ideas of how these parts can work together to provide a fail-safe system. We present our simulation and real-life experiments.
Detection and Physical Interaction with Deformable Linear Objects
May 17, 2022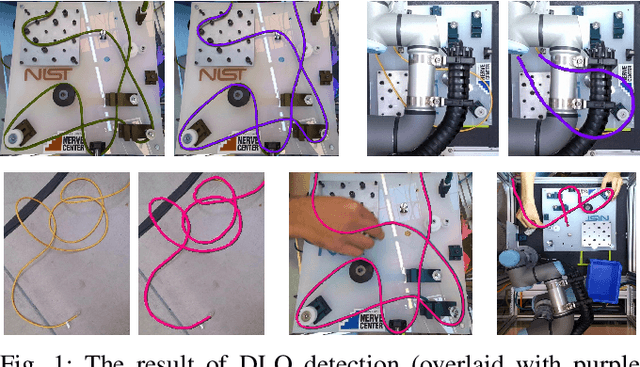
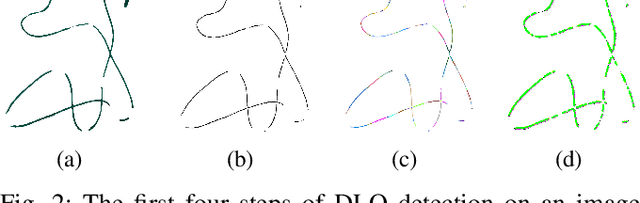
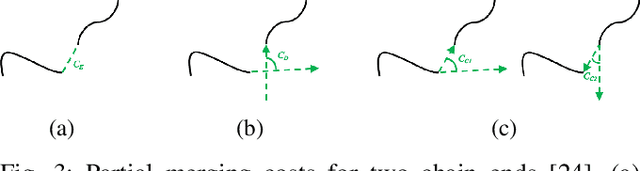
Deformable linear objects (e.g., cables, ropes, and threads) commonly appear in our everyday lives. However, perception of these objects and the study of physical interaction with them is still a growing area. There have already been successful methods to model and track deformable linear objects. However, the number of methods that can automatically extract the initial conditions in non-trivial situations for these methods has been limited, and they have been introduced to the community only recently. On the other hand, while physical interaction with these objects has been done with ground manipulators, there have not been any studies on physical interaction and manipulation of the deformable linear object with aerial robots. This workshop describes our recent work on detecting deformable linear objects, which uses the segmentation output of the existing methods to provide the initialization required by the tracking methods automatically. It works with crossings and can fill the gaps and occlusions in the segmentation and output the model desirable for physical interaction and simulation. Then we present our work on using the method for tasks such as routing and manipulation with the ground and aerial robots. We discuss our feasibility analysis on extending the physical interaction with these objects to aerial manipulation applications.
Design, Modeling and Control for a Tilt-rotor VTOL UAV in the Presence of Actuator Failure
May 11, 2022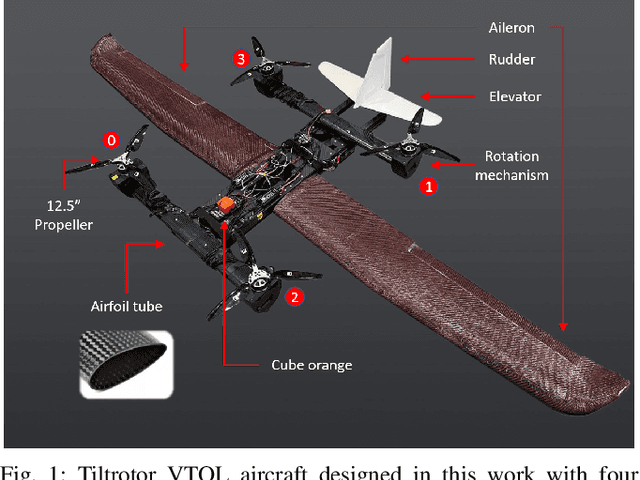
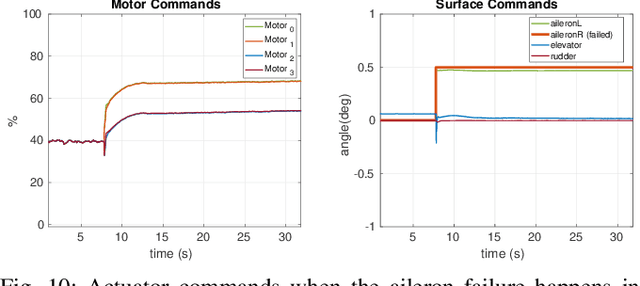
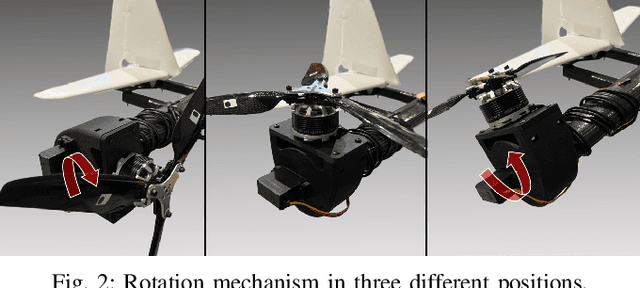
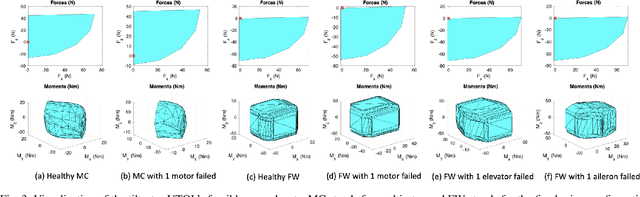
Providing both the vertical take-off and landing capabilities and the ability to fly long distances to aircraft opens the door to a wide range of new real-world aircraft applications while improving many existing applications. Tiltrotor vertical take-off and landing (VTOL) unmanned aerial vehicles (UAVs) are a better choice than fixed-wing and multirotor aircraft for such applications. Prior work on these aircraft has addressed the aerodynamic performance, design, modeling, and control. However, a less explored area is the study of their potential fault tolerance due to their inherent redundancy, which allows them to sustain some degree of actuator failure. This work introduces tolerance to several types of actuator failures in a tiltrotor VTOL aircraft. We discuss the design and model of a custom tiltrotor VTOL UAV, which is a combination of a fixed-wing aircraft and a quadrotor with tilting rotors, where the four propellers can be rotated individually. Then, we analyze the feasible wrench space the vehicle can generate and design the dynamic control allocation so that the system can adapt to actuator failure, benefiting from the configuration redundancy. The proposed approach is lightweight and is implemented as an extension to an already existing flight control stack. Extensive experiments are performed to validate that the system can maintain the controlled flight under different actuator failures. To the best of our knowledge, this work is the first study of the tiltrotor VTOL's fault-tolerance that exploits the configuration redundancy.
Attitude and Thrust Strategies for Fully-Actuated Multirotors: The Fast-Track to Real-World Applications
Nov 12, 2020
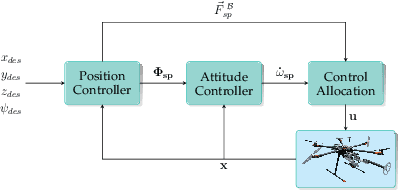
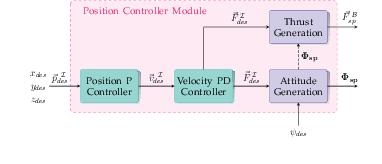
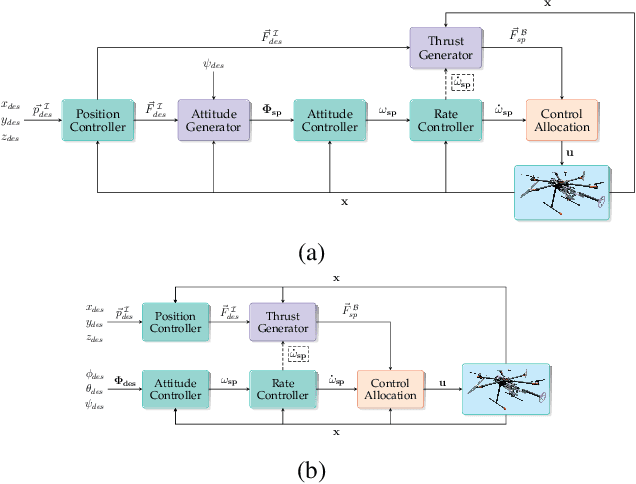
The introduction of fully-actuated multirotors has opened the door to new possibilities and more efficient solutions to many real-world applications. However, their integration had been slower than expected, partly due to the need for new tools to take full advantage of these robots. As far as we know, all the groups currently working on the fully-actuated multirotors develop new full-pose (6-D) tools and methods to use their robots, which is inefficient, time-consuming, and requires many resources. We propose methods that extend the existing flight controllers to support the new fully-actuated robots and bridge the gap between the tools already available for underactuated robots and the new fully-actuated vehicles. We introduce attitude strategies that work with the underactuated planners, controllers, tools, and remote control interfaces, all while allowing taking advantage of the full actuation. Moreover, new methods are proposed that can properly handle the limited lateral thrust suffered by many fully-actuated UAV designs. The strategies are lightweight, simple, and allow rapid integration of the available tools with these new vehicles for the fast development of new real-world applications. The real experiments on our robots and simulations on several UAV architectures show how the strategies can be utilized. The source code of the PX4 firmware enhanced with the proposed methods and its simulator with our fully-actuated hexarotor model are provided with this paper. For more information, please visit https://theairlab.org/fully-actuated/.