 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Optimize Package Picking for Large-Scale, Real-World Robot Induction
Jun 11, 2025


Warehouse automation plays a pivotal role in enhancing operational efficiency, minimizing costs, and improving resilience to workforce variability. While prior research has demonstrated the potential of machine learning (ML) models to increase picking success rates in large-scale robotic fleets by prioritizing high-probability picks and packages, these efforts primarily focused on predicting success probabilities for picks sampled using heuristic methods. Limited attention has been given, however, to leveraging data-driven approaches to directly optimize sampled picks for better performance at scale. In this study, we propose an ML-based framework that predicts transform adjustments as well as improving the selection of suction cups for multi-suction end effectors for sampled picks to enhance their success probabilities. The framework was integrated and evaluated in test workcells that resemble the operations of Amazon Robotics' Robot Induction (Robin) fleet, which is used for package manipulation. Evaluated on over 2 million picks, the proposed method achieves a 20\% reduction in pick failure rates compared to a heuristic-based pick sampling baseline, demonstrating its effectiveness in large-scale warehouse automation scenarios.
Pick Planning Strategies for Large-Scale Package Manipulation
Sep 23, 2023



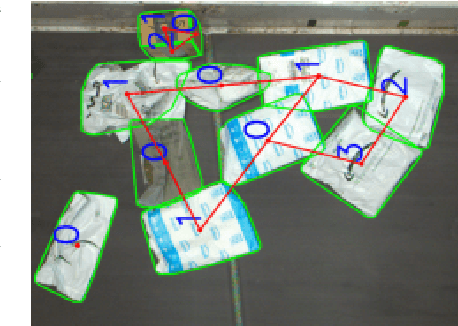
Automating warehouse operations can reduce logistics overhead costs, ultimately driving down the final price for consumers, increasing the speed of delivery, and enhancing the resiliency to market fluctuations. This extended abstract showcases a large-scale package manipulation from unstructured piles in Amazon Robotics' Robot Induction (Robin) fleet, which is used for picking and singulating up to 6 million packages per day and so far has manipulated over 2 billion packages. It describes the various heuristic methods developed over time and their successor, which utilizes a pick success predictor trained on real production data. To the best of the authors' knowledge, this work is the first large-scale deployment of learned pick quality estimation methods in a real production system.
Large-Scale Package Manipulation via Learned Metrics of Pick Success
May 17, 2023



Automating warehouse operations can reduce logistics overhead costs, ultimately driving down the final price for consumers, increasing the speed of delivery, and enhancing the resiliency to workforce fluctuations. The past few years have seen increased interest in automating such repeated tasks but mostly in controlled settings. Tasks such as picking objects from unstructured, cluttered piles have only recently become robust enough for large-scale deployment with minimal human intervention. This paper demonstrates a large-scale package manipulation from unstructured piles in Amazon Robotics' Robot Induction (Robin) fleet, which utilizes a pick success predictor trained on real production data. Specifically, the system was trained on over 394K picks. It is used for singulating up to 5~million packages per day and has manipulated over 200~million packages during this paper's evaluation period. The developed learned pick quality measure ranks various pick alternatives in real-time and prioritizes the most promising ones for execution. The pick success predictor aims to estimate from prior experience the success probability of a desired pick by the deployed industrial robotic arms in cluttered scenes containing deformable and rigid objects with partially known properties. It is a shallow machine learning model, which allows us to evaluate which features are most important for the prediction. An online pick ranker leverages the learned success predictor to prioritize the most promising picks for the robotic arm, which are then assessed for collision avoidance. This learned ranking process is demonstrated to overcome the limitations and outperform the performance of manually engineered and heuristic alternatives. To the best of the authors' knowledge, this paper presents the first large-scale deployment of learned pick quality estimation methods in a real production system.
A Simulator for Fully-Actuated UAVs
May 12, 2023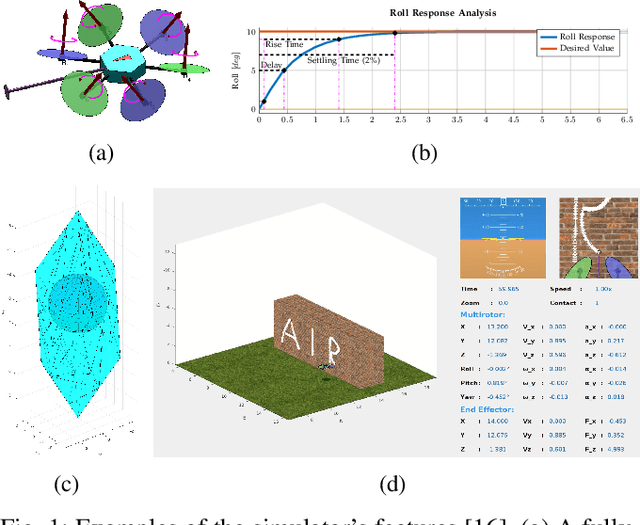
This workshop paper presents the challenges we encountered when simulating fully-actuated Unmanned Aerial Vehicles (UAVs) for our research and the solutions we developed to overcome the challenges. We describe the ARCAD simulator that has helped us rapidly implement and test different controllers ranging from Hybrid Force-Position Controllers to advanced Model Predictive Path Integrals and has allowed us to analyze the design and behavior of different fully-actuated UAVs. We used the simulator to enable real-world deployments of our fully-actuated UAV fleet for different applications. The simulator is further extended to support the physical interaction of UAVs with their environment and allow more UAV designs, such as hybrid VTOLs. The code for the simulator can be accessed from https://github.com/keipour/aircraft-simulator-matlab.
UAS Simulator for Modeling, Analysis and Control in Free Flight and Physical Interaction
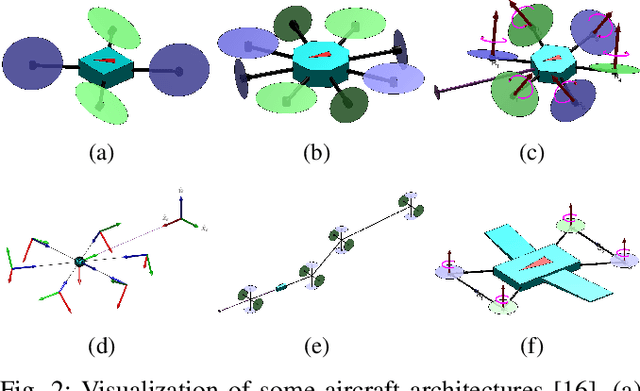
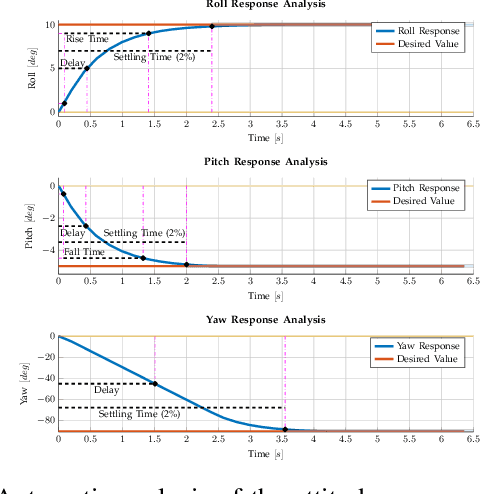
Dec 06, 2022

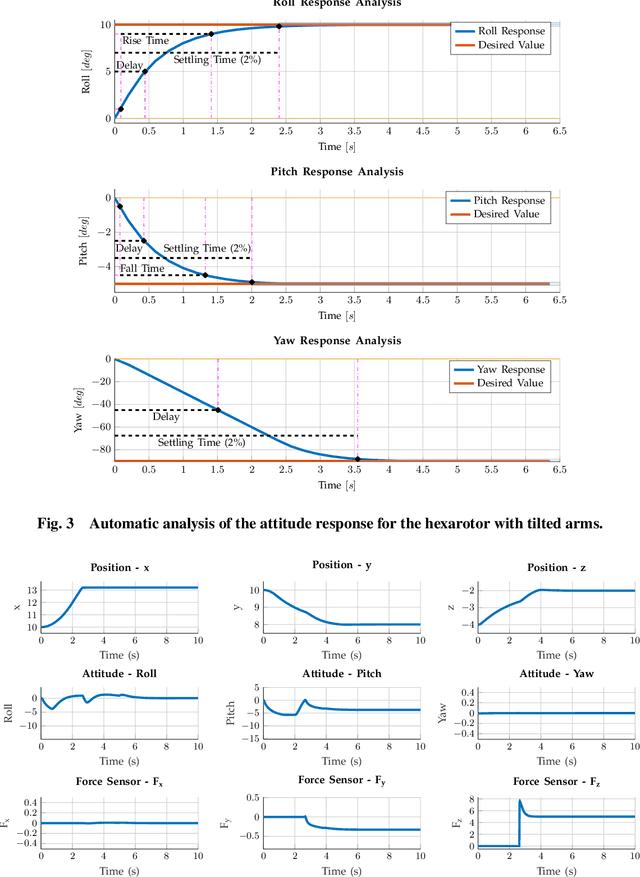

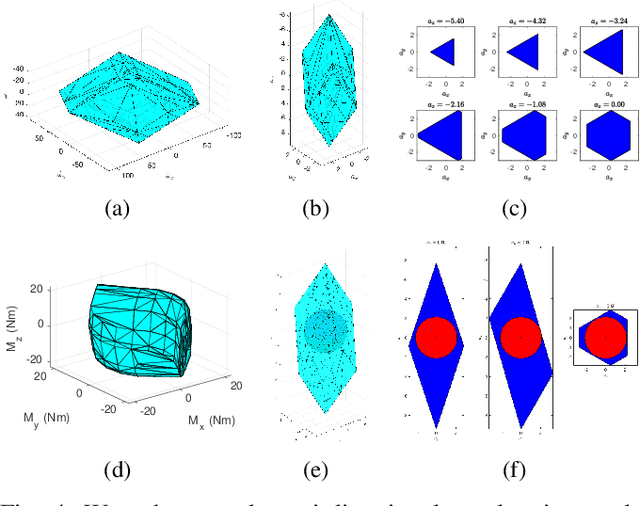
This paper presents the ARCAD simulator for the rapid development of Unmanned Aerial Systems (UAS), including underactuated and fully-actuated multirotors, fixed-wing aircraft, and Vertical Take-Off and Landing (VTOL) hybrid vehicles. The simulator is designed to accelerate these aircraft's modeling and control design. It provides various analyses of the design and operation, such as wrench-set computation, controller response, and flight optimization. In addition to simulating free flight, it can simulate the physical interaction of the aircraft with its environment. The simulator is written in MATLAB to allow rapid prototyping and is capable of generating graphical visualization of the aircraft and the environment in addition to generating the desired plots. It has been used to develop several real-world multirotor and VTOL applications. The source code is available at https://github.com/keipour/aircraft-simulator-matlab.
Physical Interaction and Manipulation of the Environment using Aerial Robots
Jul 06, 2022



The physical interaction of aerial robots with their environment has countless potential applications and is an emerging area with many open challenges. Fully-actuated multirotors have been introduced to tackle some of these challenges. They provide complete control over position and orientation and eliminate the need for attaching a multi-DoF manipulation arm to the robot. However, there are many open problems before they can be used in real-world applications. Researchers have introduced some methods for physical interaction in limited settings. Their experiments primarily use prototype-level software without an efficient path to integration with real-world applications. We describe a new cost-effective solution for integrating these robots with the existing software and hardware flight systems for real-world applications and expand it to physical interaction applications. On the other hand, the existing control approaches for fully-actuated robots assume conservative limits for the thrusts and moments available to the robot. Using conservative assumptions for these already-inefficient robots makes their interactions even less optimal and may even result in many feasible physical interaction applications becoming infeasible. This work proposes a real-time method for estimating the complete set of instantaneously available forces and moments that robots can use to optimize their physical interaction performance. Finally, many real-world applications where aerial robots can improve the existing manual solutions deal with deformable objects. However, the perception and planning for their manipulation is still challenging. This research explores how aerial physical interaction can be extended to deformable objects. It provides a detection method suitable for manipulating deformable one-dimensional objects and introduces a new perspective on planning the manipulation of these objects.
VTOL Failure Detection and Recovery by Utilizing Redundancy
Jun 01, 2022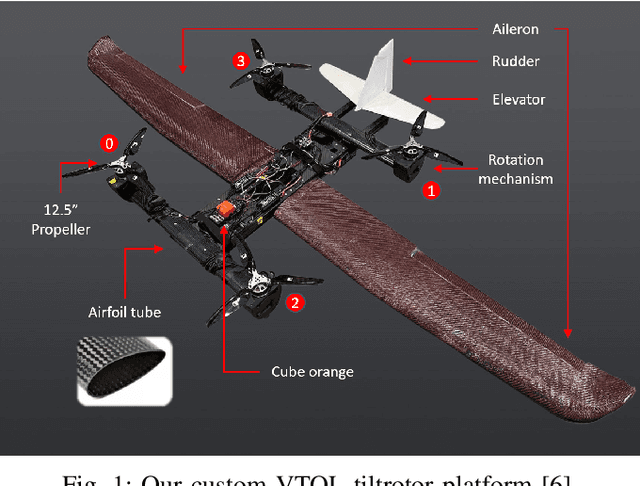
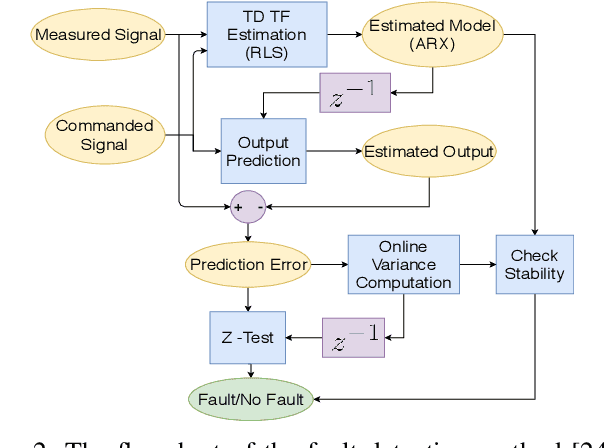
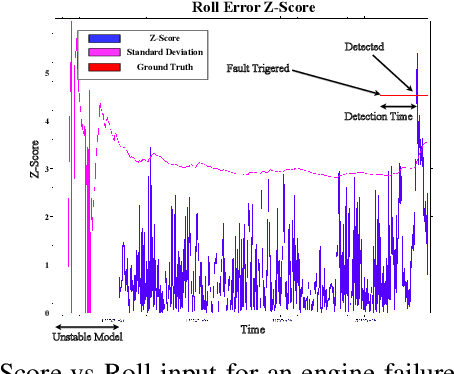
Offering vertical take-off and landing (VTOL) capabilities and the ability to travel great distances are crucial for Urban Air Mobility (UAM) vehicles. These capabilities make hybrid VTOLs the clear front-runners among UAM platforms. On the other hand, concerns regarding the safety and reliability of autonomous aircraft have grown in response to the recent growth in aerial vehicle usage. As a result, monitoring the aircraft status to report any failures and recovering to prevent the loss of control when a failure happens are becoming increasingly important. Hybrid VTOLs can withstand some degree of actuator failure due to their intrinsic redundancy. Their aerodynamic performance, design, modeling, and control have all been addressed in the previous studies. However, research on their potential fault tolerance is still a less investigated field. In this workshop, we will present a summary of our work on aircraft fault detection and the recovery of our hybrid VTOL. First, we will go over our real-time aircraft-independent system for detecting actuator failures and abnormal behaviors. Then, in the context of our custom tiltrotor VTOL aircraft design, we talk about our optimization-based control allocation system, which utilizes the vehicle's configuration redundancy to recover from different actuation failures. Finally, we explore the ideas of how these parts can work together to provide a fail-safe system. We present our simulation and real-life experiments.
Detection and Physical Interaction with Deformable Linear Objects
May 17, 2022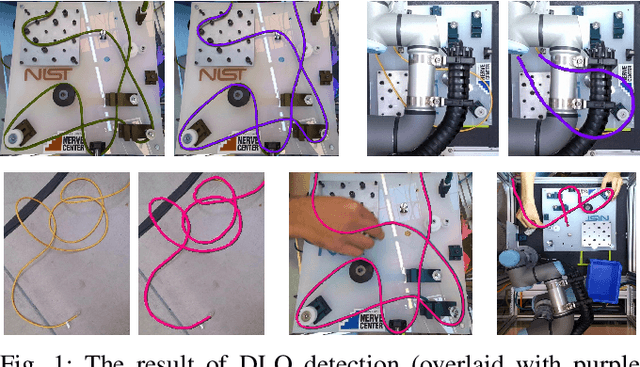
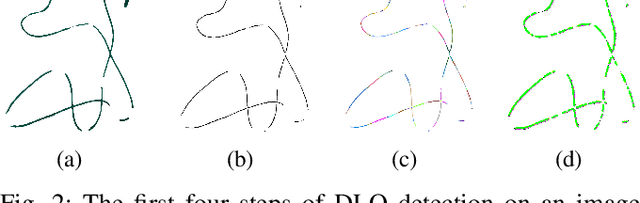
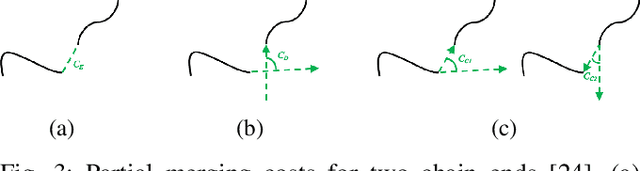
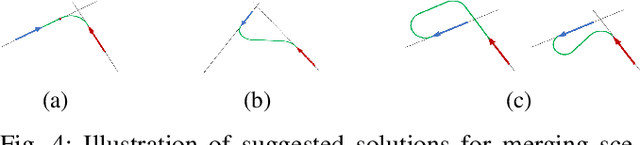
Deformable linear objects (e.g., cables, ropes, and threads) commonly appear in our everyday lives. However, perception of these objects and the study of physical interaction with them is still a growing area. There have already been successful methods to model and track deformable linear objects. However, the number of methods that can automatically extract the initial conditions in non-trivial situations for these methods has been limited, and they have been introduced to the community only recently. On the other hand, while physical interaction with these objects has been done with ground manipulators, there have not been any studies on physical interaction and manipulation of the deformable linear object with aerial robots. This workshop describes our recent work on detecting deformable linear objects, which uses the segmentation output of the existing methods to provide the initialization required by the tracking methods automatically. It works with crossings and can fill the gaps and occlusions in the segmentation and output the model desirable for physical interaction and simulation. Then we present our work on using the method for tasks such as routing and manipulation with the ground and aerial robots. We discuss our feasibility analysis on extending the physical interaction with these objects to aerial manipulation applications.
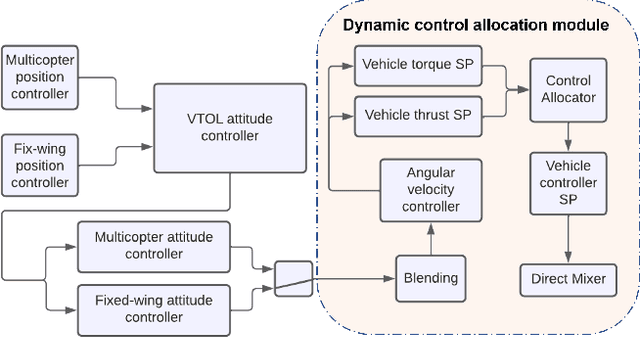
Design, Modeling and Control for a Tilt-rotor VTOL UAV in the Presence of Actuator Failure
May 11, 2022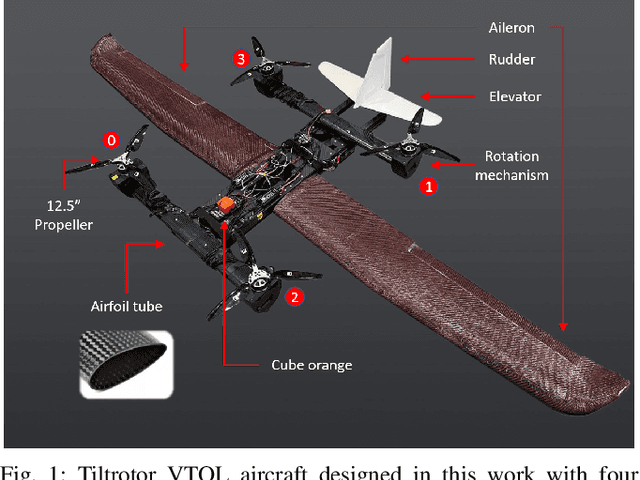
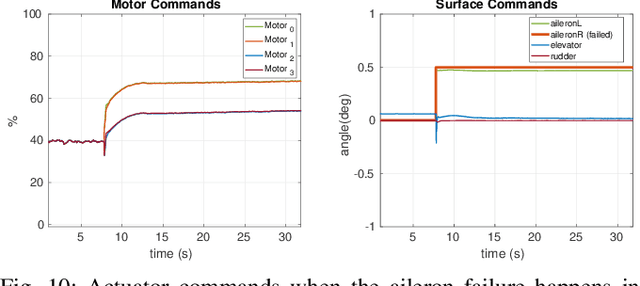
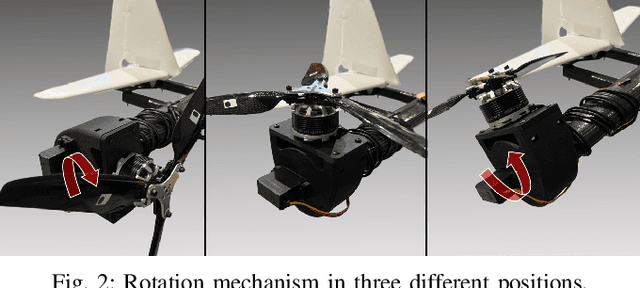
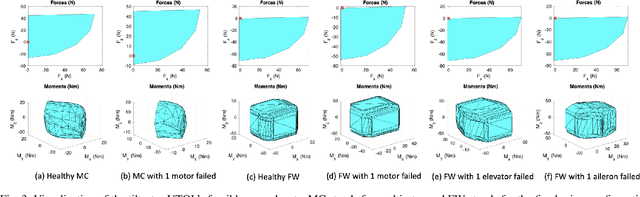
Providing both the vertical take-off and landing capabilities and the ability to fly long distances to aircraft opens the door to a wide range of new real-world aircraft applications while improving many existing applications. Tiltrotor vertical take-off and landing (VTOL) unmanned aerial vehicles (UAVs) are a better choice than fixed-wing and multirotor aircraft for such applications. Prior work on these aircraft has addressed the aerodynamic performance, design, modeling, and control. However, a less explored area is the study of their potential fault tolerance due to their inherent redundancy, which allows them to sustain some degree of actuator failure. This work introduces tolerance to several types of actuator failures in a tiltrotor VTOL aircraft. We discuss the design and model of a custom tiltrotor VTOL UAV, which is a combination of a fixed-wing aircraft and a quadrotor with tilting rotors, where the four propellers can be rotated individually. Then, we analyze the feasible wrench space the vehicle can generate and design the dynamic control allocation so that the system can adapt to actuator failure, benefiting from the configuration redundancy. The proposed approach is lightweight and is implemented as an extension to an already existing flight control stack. Extensive experiments are performed to validate that the system can maintain the controlled flight under different actuator failures. To the best of our knowledge, this work is the first study of the tiltrotor VTOL's fault-tolerance that exploits the configuration redundancy.
Omnifont Persian OCR System Using Primitives
Feb 13, 2022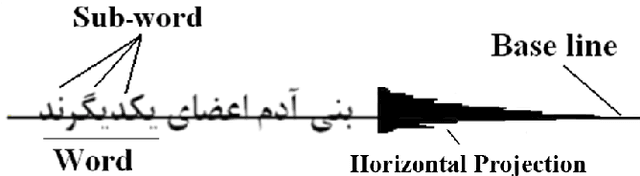
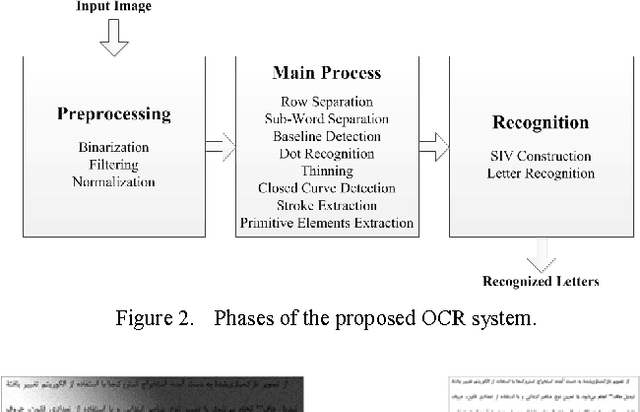
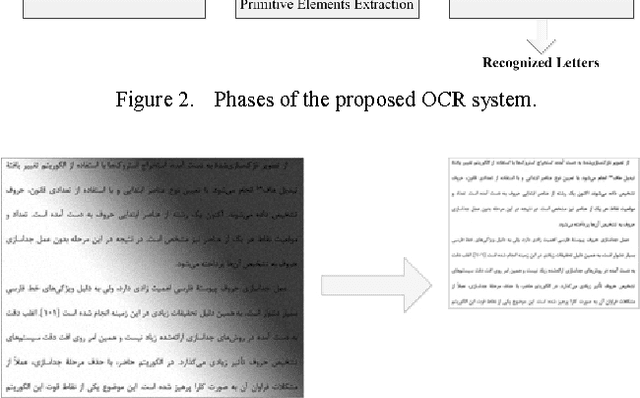
In this paper, we introduce a model-based omnifont Persian OCR system. The system uses a set of 8 primitive elements as structural features for recognition. First, the scanned document is preprocessed. After normalizing the preprocessed image, text rows and sub-words are separated and then thinned. After recognition of dots in sub-words, strokes are extracted and primitive elements of each sub-word are recognized using the strokes. Finally, the primitives are compared with a predefined set of character identification vectors in order to identify sub-word characters. The separation and recognition steps of the system are concurrent, eliminating unavoidable errors of independent separation of letters. The system has been tested on documents with 14 standard Persian fonts in 6 sizes. The achieved precision is 97.06%.