 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Spatial Representation and Routing of Deformable One-Dimensional Objects for Manipulation
Paper and Code
Feb 13, 2022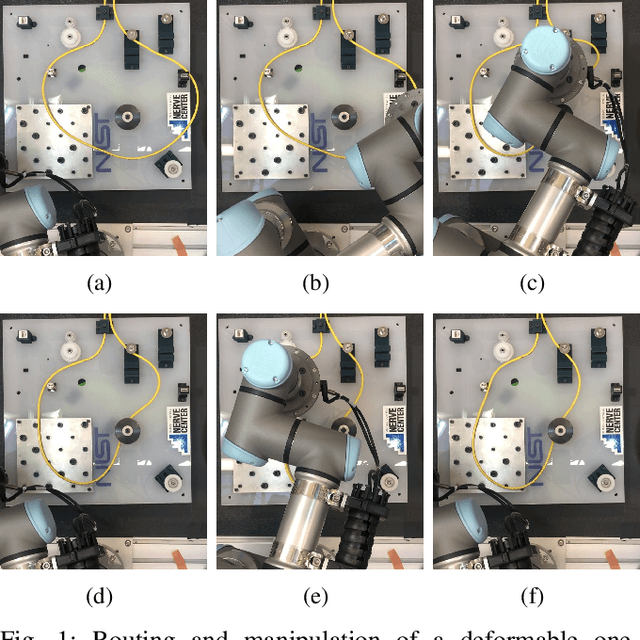

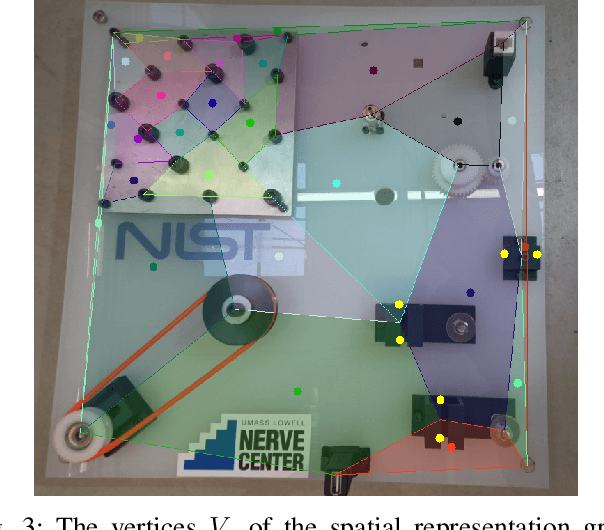
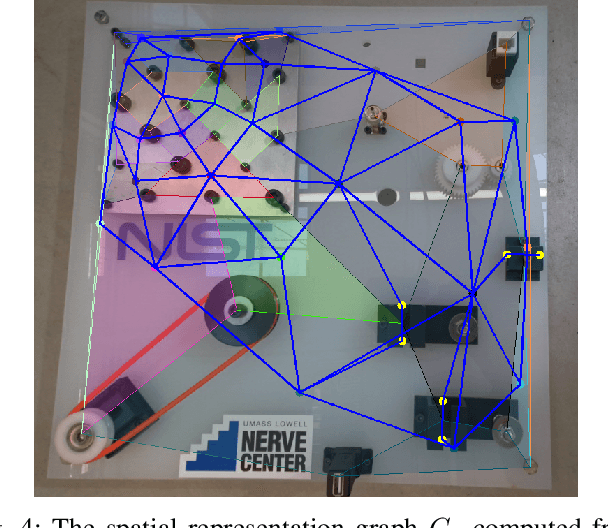
With the field of rigid-body robotics having matured in the last fifty years, routing, planning, and manipulation of deformable objects have emerged in recent years as a more untouched research area in many fields ranging from surgical robotics to industrial assembly and construction. Routing approaches for deformable objects which rely on learned implicit spatial representations (e.g., Learning-from-Demonstration methods) make them vulnerable to changes in the environment and the specific setup. On the other hand, algorithms that entirely separate the spatial representation of the deformable object from the routing and manipulation, often using a representation approach independent of planning, result in slow planning in high dimensional space. This paper proposes a novel approach to spatial representation combined with route planning that allows efficient routing of deformable one-dimensional objects (e.g., wires, cables, ropes, threads). The spatial representation is based on the geometrical decomposition of the space into convex subspaces, which allows an efficient coding of the configuration. Having such a configuration, the routing problem can be solved using a dynamic programming matching method with a quadratic time and space complexity. The proposed method couples the routing and efficient configuration for improved planning time. Our tests and experiments show the method correctly computing the next manipulation action in sub-millisecond time and accomplishing various routing and manipulation tasks.