 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unified MPC Strategy for a Tilt-rotor VTOL UAV Towards Seamless Mode Transitioning
Feb 12, 2024


Capabilities of long-range flight and vertical take-off and landing (VTOL) are essential for Urban Air Mobility (UAM). Tiltrotor VTOLs have the advantage of balancing control simplicity and system complexity due to their redundant control authority. Prior work on controlling these aircraft either requires separate controllers and switching modes for different vehicle configurations or performs the control allocation on separate actuator sets, which cannot fully use the potential of the redundancy of tiltrotor. This paper introduces a unified MPC-based control strategy for a customized tiltrotor VTOL Unmanned Aerial Vehicle (UAV), which does not require mode-switching and can perform the control allocation in a consistent way. The incorporation of four independently controllable rotors in VTOL design offers an extra level of redundancy, allowing the VTOL to accommodate actuator failures. The result shows that our approach outperforms PID controllers while maintaining unified control. It allows the VTOL to perform smooth acceleration/deceleration, and precise coordinated turns. In addition, the independently controlled tilts enable the vehicle to handle actuator failures, ensuring that the aircraft remains operational even in the event of a servo or motor malfunction.
* In proceedings of the 2024 AIAA SciTech Forum, Session: Guidance, Navigation, and Control GNC-49
Image-based Visual Servo Control for Aerial Manipulation Using a Fully-Actuated UAV
Jun 28, 2023



Using Unmanned Aerial Vehicles (UAVs) to perform high-altitude manipulation tasks beyond just passive visual application can reduce the time, cost, and risk of human workers. Prior research on aerial manipulation has relied on either ground truth state estimate or GPS/total station with some Simultaneous Localization and Mapping (SLAM) algorithms, which may not be practical for many applications close to infrastructure with degraded GPS signal or featureless environments. Visual servo can avoid the need to estimate robot pose. Existing works on visual servo for aerial manipulation either address solely end-effector position control or rely on precise velocity measurement and pre-defined visual visual marker with known pattern. Furthermore, most of previous work used under-actuated UAVs, resulting in complicated mechanical and hence control design for the end-effector. This paper develops an image-based visual servo control strategy for bridge maintenance using a fully-actuated UAV. The main components are (1) a visual line detection and tracking system, (2) a hybrid impedance force and motion control system. Our approach does not rely on either robot pose/velocity estimation from an external localization system or pre-defined visual markers. The complexity of the mechanical system and controller architecture is also minimized due to the fully-actuated nature. Experiments show that the system can effectively execute motion tracking and force holding using only the visual guidance for the bridge painting. To the best of our knowledge, this is one of the first studies on aerial manipulation using visual servo that is capable of achieving both motion and force control without the need of external pose/velocity information or pre-defined visual guidance.
UAS Simulator for Modeling, Analysis and Control in Free Flight and Physical Interaction
Dec 06, 2022


This paper presents the ARCAD simulator for the rapid development of Unmanned Aerial Systems (UAS), including underactuated and fully-actuated multirotors, fixed-wing aircraft, and Vertical Take-Off and Landing (VTOL) hybrid vehicles. The simulator is designed to accelerate these aircraft's modeling and control design. It provides various analyses of the design and operation, such as wrench-set computation, controller response, and flight optimization. In addition to simulating free flight, it can simulate the physical interaction of the aircraft with its environment. The simulator is written in MATLAB to allow rapid prototyping and is capable of generating graphical visualization of the aircraft and the environment in addition to generating the desired plots. It has been used to develop several real-world multirotor and VTOL applications. The source code is available at https://github.com/keipour/aircraft-simulator-matlab.
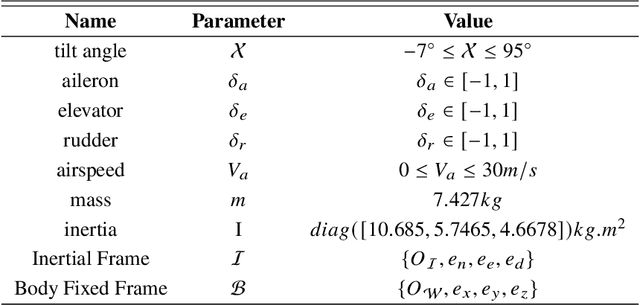
Design, Modeling and Control for a Tilt-rotor VTOL UAV in the Presence of Actuator Failure
May 11, 2022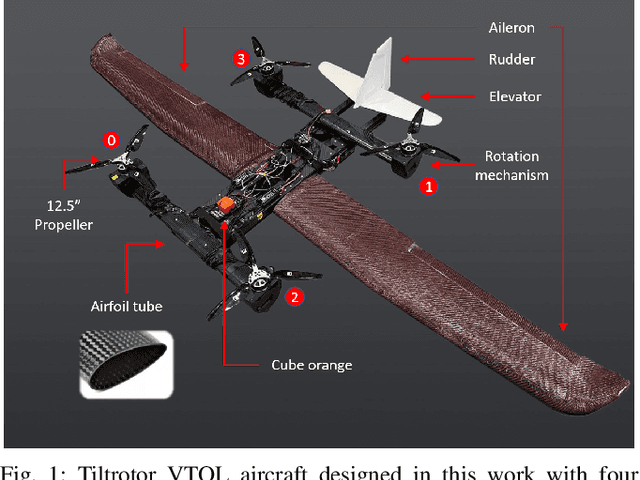
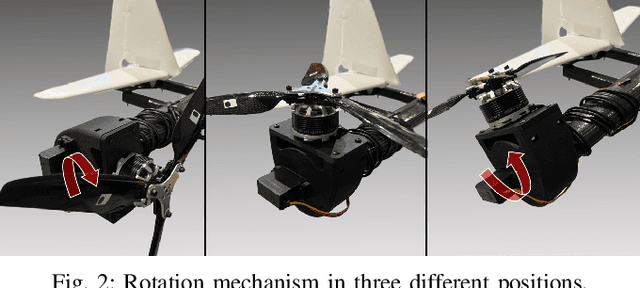
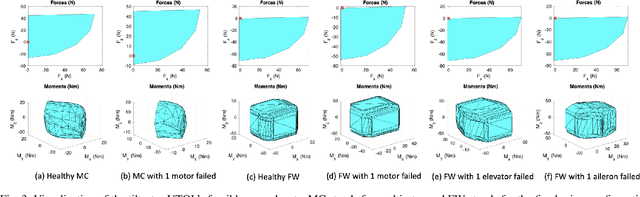
Providing both the vertical take-off and landing capabilities and the ability to fly long distances to aircraft opens the door to a wide range of new real-world aircraft applications while improving many existing applications. Tiltrotor vertical take-off and landing (VTOL) unmanned aerial vehicles (UAVs) are a better choice than fixed-wing and multirotor aircraft for such applications. Prior work on these aircraft has addressed the aerodynamic performance, design, modeling, and control. However, a less explored area is the study of their potential fault tolerance due to their inherent redundancy, which allows them to sustain some degree of actuator failure. This work introduces tolerance to several types of actuator failures in a tiltrotor VTOL aircraft. We discuss the design and model of a custom tiltrotor VTOL UAV, which is a combination of a fixed-wing aircraft and a quadrotor with tilting rotors, where the four propellers can be rotated individually. Then, we analyze the feasible wrench space the vehicle can generate and design the dynamic control allocation so that the system can adapt to actuator failure, benefiting from the configuration redundancy. The proposed approach is lightweight and is implemented as an extension to an already existing flight control stack. Extensive experiments are performed to validate that the system can maintain the controlled flight under different actuator failures. To the best of our knowledge, this work is the first study of the tiltrotor VTOL's fault-tolerance that exploits the configuration redundancy.