 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unified MPC Strategy for a Tilt-rotor VTOL UAV Towards Seamless Mode Transitioning
Paper and Code
Feb 12, 2024
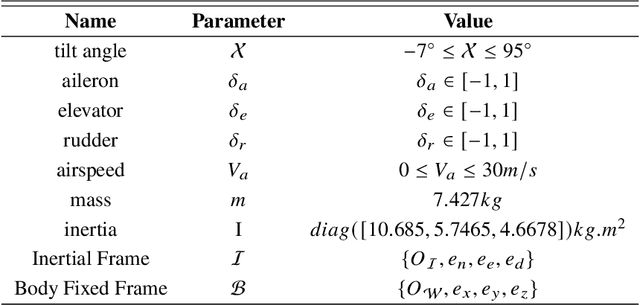


Capabilities of long-range flight and vertical take-off and landing (VTOL) are essential for Urban Air Mobility (UAM). Tiltrotor VTOLs have the advantage of balancing control simplicity and system complexity due to their redundant control authority. Prior work on controlling these aircraft either requires separate controllers and switching modes for different vehicle configurations or performs the control allocation on separate actuator sets, which cannot fully use the potential of the redundancy of tiltrotor. This paper introduces a unified MPC-based control strategy for a customized tiltrotor VTOL Unmanned Aerial Vehicle (UAV), which does not require mode-switching and can perform the control allocation in a consistent way. The incorporation of four independently controllable rotors in VTOL design offers an extra level of redundancy, allowing the VTOL to accommodate actuator failures. The result shows that our approach outperforms PID controllers while maintaining unified control. It allows the VTOL to perform smooth acceleration/deceleration, and precise coordinated turns. In addition, the independently controlled tilts enable the vehicle to handle actuator failures, ensuring that the aircraft remains operational even in the event of a servo or motor malfunction.