 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCocoaBench: Evaluating Unified Digital Agents in the Wild
Apr 14, 2026LLM agents now perform strongly in software engineering, deep research, GUI automation, and various other applications, while recent agent scaffolds and models are increasingly integrating these capabilities into unified systems. Yet, most evaluations still test these capabilities in isolation, which leaves a gap for more diverse use cases that require agents to combine different capabilities. We introduce CocoaBench, a benchmark for unified digital agents built from human-designed, long-horizon tasks that require flexible composition of vision, search, and coding. Tasks are specified only by an instruction and an automatic evaluation function over the final output, enabling reliable and scalable evaluation across diverse agent infrastructures. We also present CocoaAgent, a lightweight shared scaffold for controlled comparison across model backbones. Experiments show that current agents remain far from reliable on CocoaBench, with the best evaluated system achieving only 45.1% success rate. Our analysis further points to substantial room for improvement in reasoning and planning, tool use and execution, and visual grounding.
IsoCompute Playbook: Optimally Scaling Sampling Compute for LLM RL
Mar 12, 2026While scaling laws guide compute allocation for LLM pre-training, analogous prescriptions for reinforcement learning (RL) post-training of large language models (LLMs) remain poorly understood. We study the compute-optimal allocation of sampling compute for on-policy RL methods in LLMs, framing scaling as a compute-constrained optimization over three resources: parallel rollouts per problem, number of problems per batch, and number of update steps. We find that the compute-optimal number of parallel rollouts per problem increases predictably with compute budget and then saturates. This trend holds across both easy and hard problems, though driven by different mechanisms: solution sharpening on easy problems and coverage expansion on hard problems. We further show that increasing the number of parallel rollouts mitigates interference across problems, while the number of problems per batch primarily affects training stability and can be chosen within a broad range. Validated across base models and data distributions, our results recast RL scaling laws as prescriptive allocation rules and provide practical guidance for compute-efficient LLM RL post-training.
Learning Modal-Mixed Chain-of-Thought Reasoning with Latent Embeddings
Jan 31, 2026We study how to extend chain-of-thought (CoT) beyond language to better handle multimodal reasoning. While CoT helps LLMs and VLMs articulate intermediate steps, its text-only form often fails on vision-intensive problems where key intermediate states are inherently visual. We introduce modal-mixed CoT, which interleaves textual tokens with compact visual sketches represented as latent embeddings. To bridge the modality gap without eroding the original knowledge and capability of the VLM, we use the VLM itself as an encoder and train the language backbone to reconstruct its own intermediate vision embeddings, to guarantee the semantic alignment of the visual latent space. We further attach a diffusion-based latent decoder, invoked by a special control token and conditioned on hidden states from the VLM. In this way, the diffusion head carries fine-grained perceptual details while the VLM specifies high-level intent, which cleanly disentangles roles and reduces the optimization pressure of the VLM. Training proceeds in two stages: supervised fine-tuning on traces that interleave text and latents with a joint next-token and latent-reconstruction objective, followed by reinforcement learning that teaches when to switch modalities and how to compose long reasoning chains. Extensive experiments across 11 diverse multimodal reasoning tasks, demonstrate that our method yields better performance than language-only and other CoT methods. Our code will be publicly released.
K2-Think: A Parameter-Efficient Reasoning System
Sep 09, 2025K2-Think is a reasoning system that achieves state-of-the-art performance with a 32B parameter model, matching or surpassing much larger models like GPT-OSS 120B and DeepSeek v3.1. Built on the Qwen2.5 base model, our system shows that smaller models can compete at the highest levels by combining advanced post-training and test-time computation techniques. The approach is based on six key technical pillars: Long Chain-of-thought Supervised Finetuning, Reinforcement Learning with Verifiable Rewards (RLVR), Agentic planning prior to reasoning, Test-time Scaling, Speculative Decoding, and Inference-optimized Hardware, all using publicly available open-source datasets. K2-Think excels in mathematical reasoning, achieving state-of-the-art scores on public benchmarks for open-source models, while also performing strongly in other areas such as Code and Science. Our results confirm that a more parameter-efficient model like K2-Think 32B can compete with state-of-the-art systems through an integrated post-training recipe that includes long chain-of-thought training and strategic inference-time enhancements, making open-source reasoning systems more accessible and affordable. K2-Think is freely available at k2think.ai, offering best-in-class inference speeds of over 2,000 tokens per second per request via the Cerebras Wafer-Scale Engine.
Vision-G1: Towards General Vision Language Reasoning with Multi-Domain Data Curation
Aug 18, 2025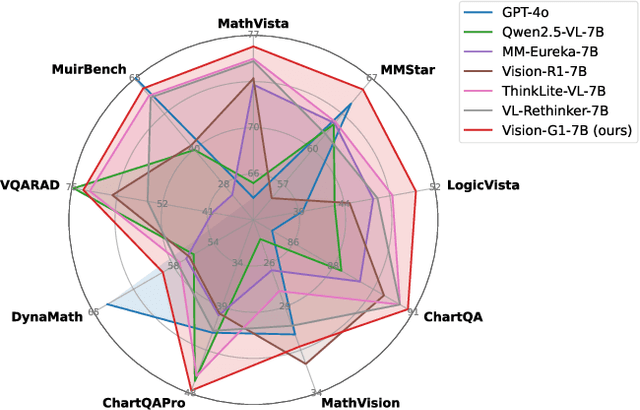
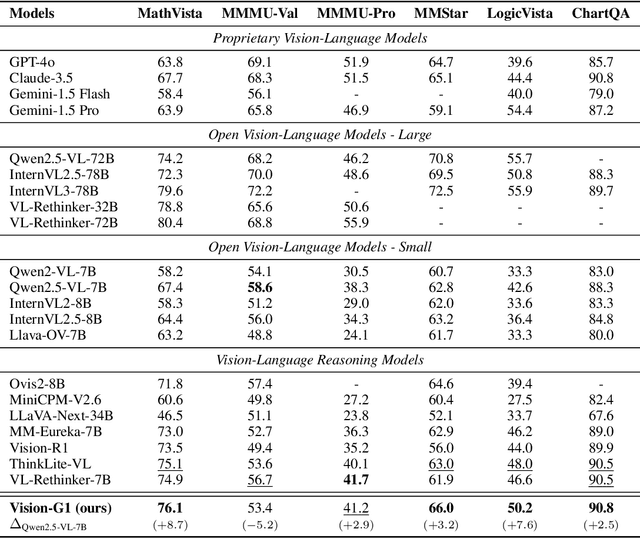
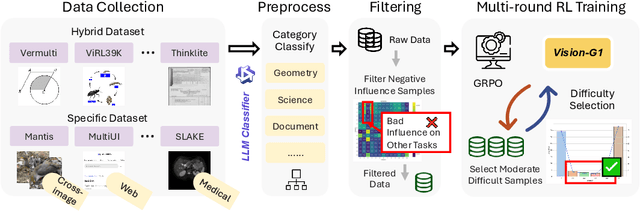
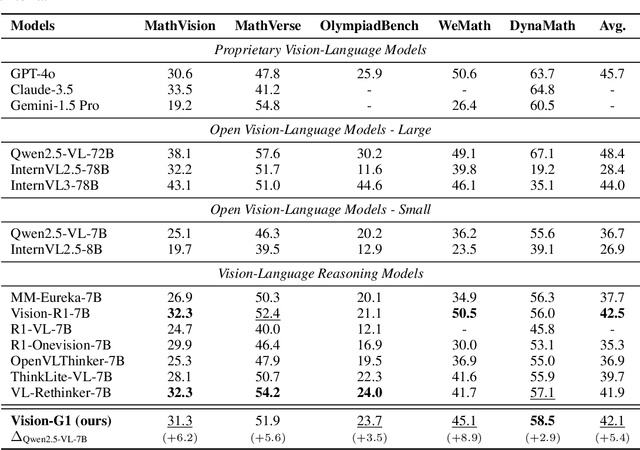
Despite their success, current training pipelines for reasoning VLMs focus on a limited range of tasks, such as mathematical and logical reasoning. As a result, these models face difficulties in generalizing their reasoning capabilities to a wide range of domains, primarily due to the scarcity of readily available and verifiable reward data beyond these narrowly defined areas. Moreover, integrating data from multiple domains is challenging, as the compatibility between domain-specific datasets remains uncertain. To address these limitations, we build a comprehensive RL-ready visual reasoning dataset from 46 data sources across 8 dimensions, covering a wide range of tasks such as infographic, mathematical, spatial, cross-image, graphic user interface, medical, common sense and general science. We propose an influence function based data selection and difficulty based filtering strategy to identify high-quality training samples from this dataset. Subsequently, we train the VLM, referred to as Vision-G1, using multi-round RL with a data curriculum to iteratively improve its visual reasoning capabilities. Our model achieves state-of-the-art performance across various visual reasoning benchmarks, outperforming similar-sized VLMs and even proprietary models like GPT-4o and Gemini-1.5 Flash. The model, code and dataset are publicly available at https://github.com/yuh-zha/Vision-G1.
Revisiting Reinforcement Learning for LLM Reasoning from A Cross-Domain Perspective
Jun 17, 2025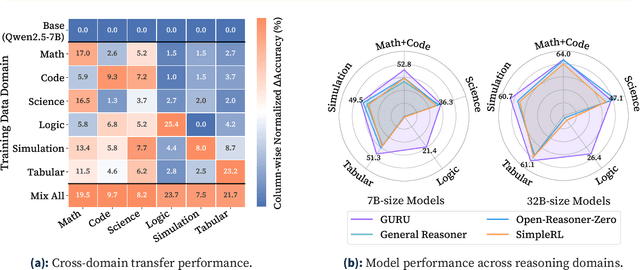
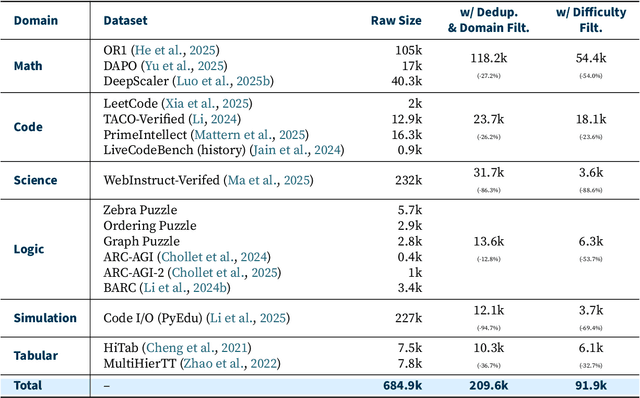
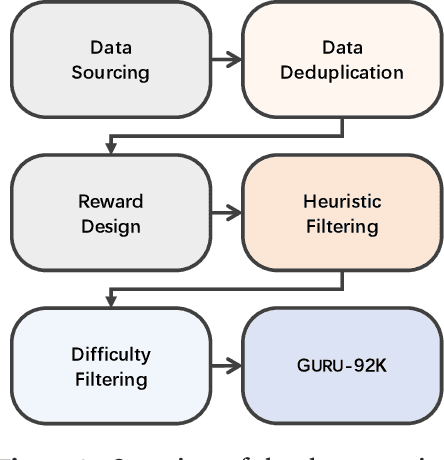

Reinforcement learning (RL) has emerged as a promising approach to improve large language model (LLM) reasoning, yet most open efforts focus narrowly on math and code, limiting our understanding of its broader applicability to general reasoning. A key challenge lies in the lack of reliable, scalable RL reward signals across diverse reasoning domains. We introduce Guru, a curated RL reasoning corpus of 92K verifiable examples spanning six reasoning domains--Math, Code, Science, Logic, Simulation, and Tabular--each built through domain-specific reward design, deduplication, and filtering to ensure reliability and effectiveness for RL training. Based on Guru, we systematically revisit established findings in RL for LLM reasoning and observe significant variation across domains. For example, while prior work suggests that RL primarily elicits existing knowledge from pretrained models, our results reveal a more nuanced pattern: domains frequently seen during pretraining (Math, Code, Science) easily benefit from cross-domain RL training, while domains with limited pretraining exposure (Logic, Simulation, and Tabular) require in-domain training to achieve meaningful performance gains, suggesting that RL is likely to facilitate genuine skill acquisition. Finally, we present Guru-7B and Guru-32B, two models that achieve state-of-the-art performance among open models RL-trained with publicly available data, outperforming best baselines by 7.9% and 6.7% on our 17-task evaluation suite across six reasoning domains. We also show that our models effectively improve the Pass@k performance of their base models, particularly on complex tasks less likely to appear in pretraining data. We release data, models, training and evaluation code to facilitate general-purpose reasoning at: https://github.com/LLM360/Reasoning360
Decentralized Arena: Towards Democratic and Scalable Automatic Evaluation of Language Models
May 19, 2025



The recent explosion of large language models (LLMs), each with its own general or specialized strengths, makes scalable, reliable benchmarking more urgent than ever. Standard practices nowadays face fundamental trade-offs: closed-ended question-based benchmarks (eg MMLU) struggle with saturation as newer models emerge, while crowd-sourced leaderboards (eg Chatbot Arena) rely on costly and slow human judges. Recently, automated methods (eg LLM-as-a-judge) shed light on the scalability, but risk bias by relying on one or a few "authority" models. To tackle these issues, we propose Decentralized Arena (dearena), a fully automated framework leveraging collective intelligence from all LLMs to evaluate each other. It mitigates single-model judge bias by democratic, pairwise evaluation, and remains efficient at scale through two key components: (1) a coarse-to-fine ranking algorithm for fast incremental insertion of new models with sub-quadratic complexity, and (2) an automatic question selection strategy for the construction of new evaluation dimensions. Across extensive experiments across 66 LLMs, dearena attains up to 97% correlation with human judgements, while significantly reducing the cost. Our code and data will be publicly released on https://github.com/maitrix-org/de-arena.
Reasoning by Superposition: A Theoretical Perspective on Chain of Continuous Thought
May 18, 2025Large Language Models (LLMs) have demonstrated remarkable performance in many applications, including challenging reasoning problems via chain-of-thoughts (CoTs) techniques that generate ``thinking tokens'' before answering the questions. While existing theoretical works demonstrate that CoTs with discrete tokens boost the capability of LLMs, recent work on continuous CoTs lacks a theoretical understanding of why it outperforms discrete counterparts in various reasoning tasks such as directed graph reachability, a fundamental graph reasoning problem that includes many practical domain applications as special cases. In this paper, we prove that a two-layer transformer with $D$ steps of continuous CoTs can solve the directed graph reachability problem, where $D$ is the diameter of the graph, while the best known result of constant-depth transformers with discrete CoTs requires $O(n^2)$ decoding steps where $n$ is the number of vertices ($D<n$). In our construction, each continuous thought vector is a superposition state that encodes multiple search frontiers simultaneously (i.e., parallel breadth-first search (BFS)), while discrete CoTs must choose a single path sampled from the superposition state, which leads to sequential search that requires many more steps and may be trapped into local solutions. We also performed extensive experiments to verify that our theoretical construction aligns well with the empirical solution obtained via training dynamics. Notably, encoding of multiple search frontiers as a superposition state automatically emerges in training continuous CoTs, without explicit supervision to guide the model to explore multiple paths simultaneously.
LLM Pretraining with Continuous Concepts
Feb 12, 2025



Next token prediction has been the standard training objective used in large language model pretraining. Representations are learned as a result of optimizing for token-level perplexity. We propose Continuous Concept Mixing (CoCoMix), a novel pretraining framework that combines discrete next token prediction with continuous concepts. Specifically, CoCoMix predicts continuous concepts learned from a pretrained sparse autoencoder and mixes them into the model's hidden state by interleaving with token hidden representations. Through experiments on multiple benchmarks, including language modeling and downstream reasoning tasks, we show that CoCoMix is more sample efficient and consistently outperforms standard next token prediction, knowledge distillation and inserting pause tokens. We find that combining both concept learning and interleaving in an end-to-end framework is critical to performance gains. Furthermore, CoCoMix enhances interpretability and steerability by allowing direct inspection and modification of the predicted concept, offering a transparent way to guide the model's internal reasoning process.
Linear Correlation in LM's Compositional Generalization and Hallucination
Feb 06, 2025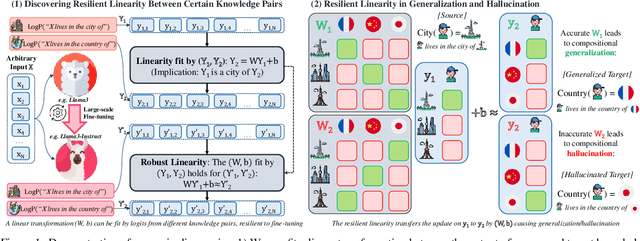

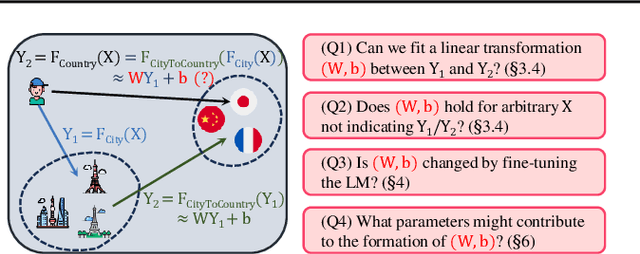

The generalization of language models (LMs) is undergoing active debates, contrasting their potential for general intelligence with their struggles with basic knowledge composition (e.g., reverse/transition curse). This paper uncovers the phenomenon of linear correlations in LMs during knowledge composition. For explanation, there exists a linear transformation between certain related knowledge that maps the next token prediction logits from one prompt to another, e.g., "X lives in the city of" $\rightarrow$ "X lives in the country of" for every given X. This mirrors the linearity in human knowledge composition, such as Paris $\rightarrow$ France. Our findings indicate that the linear transformation is resilient to large-scale fine-tuning, generalizing updated knowledge when aligned with real-world relationships, but causing hallucinations when it deviates. Empirical results suggest that linear correlation can serve as a potential identifier of LM's generalization. Finally, we show such linear correlations can be learned with a single feedforward network and pre-trained vocabulary representations, indicating LM generalization heavily relies on the latter.