 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBreaking the Reversal Curse in Autoregressive Language Models via Identity Bridge
Feb 02, 2026Autoregressive large language models (LLMs) have achieved remarkable success in many complex tasks, yet they can still fail in very simple logical reasoning such as the "reversal curse" -- when trained on forward knowledge data of the form "$A \rightarrow B$" (e.g., Alice's husband is Bob), the model is unable to deduce the reversal knowledge "$B \leftarrow A$" (e.g., Bob's wife is Alice) during test. Extensive prior research suggests that this failure is an inherent, fundamental limit of autoregressive causal LLMs, indicating that these models tend to memorize factual-level knowledge rather than capture higher-level rules. In this paper, we challenge this view by showing that this seemingly fundamental limit can be mitigated by slightly tweaking the training data with a simple regularization data recipe called the Identity Bridge of the form "$A \to A$" (e.g., The name of Alice is Alice). Theoretically, we prove that under this recipe, even a one-layer transformer can break the reversal curse by analyzing the implicit bias of gradient descent. Empirically, we show that a 1B pretrained language model finetuned with the proposed data recipe achieves a 40% success rate on reversal tasks, in stark contrast to a near-zero success rate when trained solely on forward-knowledge data. Our work provides a novel theoretical foundation for the reversal curse and offers a principled, low-cost path to encouraging LLMs to learn higher-level rules from data.
GSM-Agent: Understanding Agentic Reasoning Using Controllable Environments
Sep 26, 2025



As LLMs are increasingly deployed as agents, agentic reasoning - the ability to combine tool use, especially search, and reasoning - becomes a critical skill. However, it is hard to disentangle agentic reasoning when evaluated in complex environments and tasks. Current agent benchmarks often mix agentic reasoning with challenging math reasoning, expert-level knowledge, and other advanced capabilities. To fill this gap, we build a novel benchmark, GSM-Agent, where an LLM agent is required to solve grade-school-level reasoning problems, but is only presented with the question in the prompt without the premises that contain the necessary information to solve the task, and needs to proactively collect that information using tools. Although the original tasks are grade-school math problems, we observe that even frontier models like GPT-5 only achieve 67% accuracy. To understand and analyze the agentic reasoning patterns, we propose the concept of agentic reasoning graph: cluster the environment's document embeddings into nodes, and map each tool call to its nearest node to build a reasoning path. Surprisingly, we identify that the ability to revisit a previously visited node, widely taken as a crucial pattern in static reasoning, is often missing for agentic reasoning for many models. Based on the insight, we propose a tool-augmented test-time scaling method to improve LLM's agentic reasoning performance by adding tools to encourage models to revisit. We expect our benchmark and the agentic reasoning framework to aid future studies of understanding and pushing the boundaries of agentic reasoning.
Generalization or Hallucination? Understanding Out-of-Context Reasoning in Transformers
Jun 12, 2025Large language models (LLMs) can acquire new knowledge through fine-tuning, but this process exhibits a puzzling duality: models can generalize remarkably from new facts, yet are also prone to hallucinating incorrect information. However, the reasons for this phenomenon remain poorly understood. In this work, we argue that both behaviors stem from a single mechanism known as out-of-context reasoning (OCR): the ability to deduce implications by associating concepts, even those without a causal link. Our experiments across five prominent LLMs confirm that OCR indeed drives both generalization and hallucination, depending on whether the associated concepts are causally related. To build a rigorous theoretical understanding of this phenomenon, we then formalize OCR as a synthetic factual recall task. We empirically show that a one-layer single-head attention-only transformer with factorized output and value matrices can learn to solve this task, while a model with combined weights cannot, highlighting the crucial role of matrix factorization. Our theoretical analysis shows that the OCR capability can be attributed to the implicit bias of gradient descent, which favors solutions that minimize the nuclear norm of the combined output-value matrix. This mathematical structure explains why the model learns to associate facts and implications with high sample efficiency, regardless of whether the correlation is causal or merely spurious. Ultimately, our work provides a theoretical foundation for understanding the OCR phenomenon, offering a new lens for analyzing and mitigating undesirable behaviors from knowledge injection.
Auditing Black-Box LLM APIs with a Rank-Based Uniformity Test
Jun 08, 2025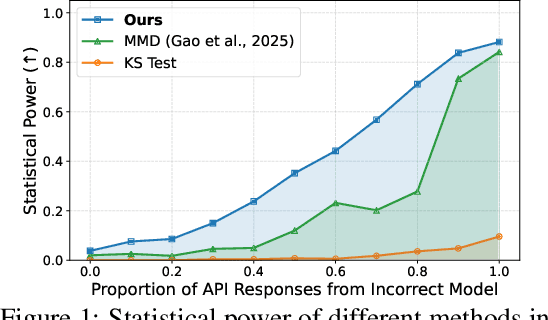
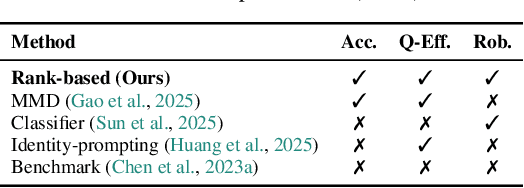
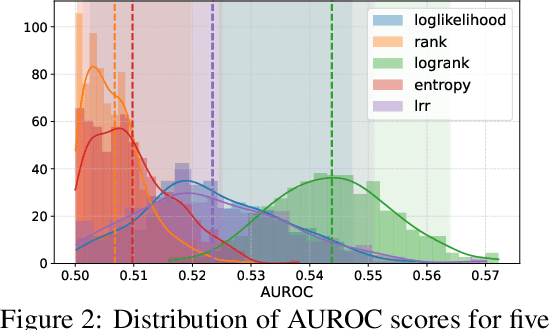
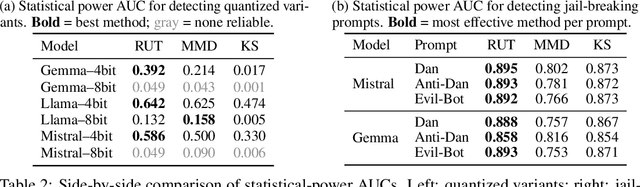
As API access becomes a primary interface to large language models (LLMs), users often interact with black-box systems that offer little transparency into the deployed model. To reduce costs or maliciously alter model behaviors, API providers may discreetly serve quantized or fine-tuned variants, which can degrade performance and compromise safety. Detecting such substitutions is difficult, as users lack access to model weights and, in most cases, even output logits. To tackle this problem, we propose a rank-based uniformity test that can verify the behavioral equality of a black-box LLM to a locally deployed authentic model. Our method is accurate, query-efficient, and avoids detectable query patterns, making it robust to adversarial providers that reroute or mix responses upon the detection of testing attempts. We evaluate the approach across diverse threat scenarios, including quantization, harmful fine-tuning, jailbreak prompts, and full model substitution, showing that it consistently achieves superior statistical power over prior methods under constrained query budgets.
Reasoning by Superposition: A Theoretical Perspective on Chain of Continuous Thought
May 18, 2025Large Language Models (LLMs) have demonstrated remarkable performance in many applications, including challenging reasoning problems via chain-of-thoughts (CoTs) techniques that generate ``thinking tokens'' before answering the questions. While existing theoretical works demonstrate that CoTs with discrete tokens boost the capability of LLMs, recent work on continuous CoTs lacks a theoretical understanding of why it outperforms discrete counterparts in various reasoning tasks such as directed graph reachability, a fundamental graph reasoning problem that includes many practical domain applications as special cases. In this paper, we prove that a two-layer transformer with $D$ steps of continuous CoTs can solve the directed graph reachability problem, where $D$ is the diameter of the graph, while the best known result of constant-depth transformers with discrete CoTs requires $O(n^2)$ decoding steps where $n$ is the number of vertices ($D<n$). In our construction, each continuous thought vector is a superposition state that encodes multiple search frontiers simultaneously (i.e., parallel breadth-first search (BFS)), while discrete CoTs must choose a single path sampled from the superposition state, which leads to sequential search that requires many more steps and may be trapped into local solutions. We also performed extensive experiments to verify that our theoretical construction aligns well with the empirical solution obtained via training dynamics. Notably, encoding of multiple search frontiers as a superposition state automatically emerges in training continuous CoTs, without explicit supervision to guide the model to explore multiple paths simultaneously.
How Do LLMs Perform Two-Hop Reasoning in Context?
Feb 19, 2025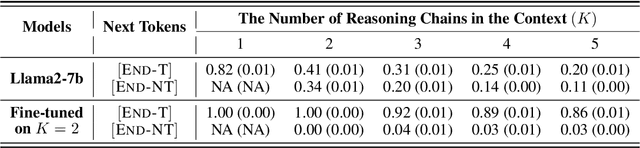
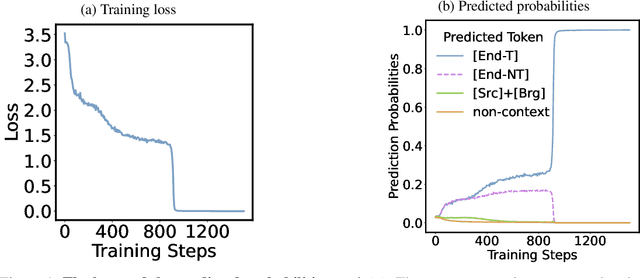
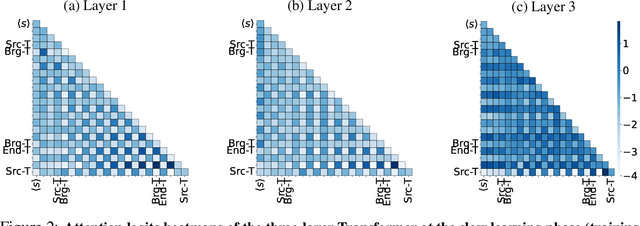
"Socrates is human. All humans are mortal. Therefore, Socrates is mortal." This classical example demonstrates two-hop reasoning, where a conclusion logically follows from two connected premises. While transformer-based Large Language Models (LLMs) can make two-hop reasoning, they tend to collapse to random guessing when faced with distracting premises. To understand the underlying mechanism, we train a three-layer transformer on synthetic two-hop reasoning tasks. The training dynamics show two stages: a slow learning phase, where the 3-layer transformer performs random guessing like LLMs, followed by an abrupt phase transitions, where the 3-layer transformer suddenly reaches $100%$ accuracy. Through reverse engineering, we explain the inner mechanisms for how models learn to randomly guess between distractions initially, and how they learn to ignore distractions eventually. We further propose a three-parameter model that supports the causal claims for the mechanisms to the training dynamics of the transformer. Finally, experiments on LLMs suggest that the discovered mechanisms generalize across scales. Our methodologies provide new perspectives for scientific understandings of LLMs and our findings provide new insights into how reasoning emerges during training.
Token Assorted: Mixing Latent and Text Tokens for Improved Language Model Reasoning
Feb 05, 2025



Large Language Models (LLMs) excel at reasoning and planning when trained on chainof-thought (CoT) data, where the step-by-step thought process is explicitly outlined by text tokens. However, this results in lengthy inputs where many words support textual coherence rather than core reasoning information, and processing these inputs consumes substantial computation resources. In this work, we propose a hybrid representation of the reasoning process, where we partially abstract away the initial reasoning steps using latent discrete tokens generated by VQ-VAE, significantly reducing the length of reasoning traces. We explore the use of latent trace abstractions in two scenarios: 1) training the model from scratch for the Keys-Finding Maze problem, 2) fine-tuning LLMs on this hybrid data with an extended vocabulary including unseen latent tokens, for both logical and mathematical reasoning problems. To facilitate effective learning, we introduce a simple training procedure that randomly mixes latent and text tokens, which enables fast adaptation to new latent tokens. Our approach consistently outperforms the baselines methods in various benchmarks.
Avoiding Catastrophe in Continuous Spaces by Asking for Help
Feb 12, 2024Most reinforcement learning algorithms with formal regret guarantees assume all mistakes are reversible and rely on essentially trying all possible options. This approach leads to poor outcomes when some mistakes are irreparable or even catastrophic. We propose a variant of the contextual bandit problem where the goal is to minimize the chance of catastrophe. Specifically, we assume that the payoff each round represents the chance of avoiding catastrophe that round, and try to maximize the product of payoffs (the overall chance of avoiding catastrophe). To give the agent some chance of success, we allow a limited number of queries to a mentor and assume a Lipschitz continuous payoff function. We present an algorithm whose regret and rate of querying the mentor both approach 0 as the time horizon grows, assuming a continuous 1D state space and a relatively "simple" payoff function. We also provide a matching lower bound: without the simplicity assumption: any algorithm either constantly asks for help or is nearly guaranteed to cause catastrophe. Finally, we identify the key obstacle to generalizing our algorithm to a multi-dimensional state space.
Efficient Prompt Caching via Embedding Similarity
Feb 02, 2024Large language models (LLMs) have achieved huge success in numerous natural language process (NLP) tasks. However, it faces the challenge of significant resource consumption during inference. In this paper, we aim to improve the inference efficiency of LLMs by prompt caching, i.e., if the current prompt can be answered by the same response of a previous prompt, one can directly utilize that previous response without calling the LLM. Specifically, we focus on the prediction accuracy of prompt caching for single-round question-answering tasks via embedding similarity. The existing embeddings of prompts mostly focus on whether two prompts are semantically similar, which is not necessarily equivalent to whether the same response can answer them. Therefore, we propose a distillation-based method to fine-tune the existing embeddings for better caching prediction. Theoretically, we provide finite-sample guarantees for the convergence of our method under different types of loss functions. Empirically, we carefully construct a hard dataset based on Kwiatkowski et al. (2019) where the existing embedding model (Wang et al., 2022) only achieves an AUC of 0.51. We then fine-tune the above embedding model, which significantly improves the AUC of caching prediction from 0.51 to 0.81. We also conduct simulations demonstrating that our trained models achieve better caching efficiency than the previous embedding model.
Towards Optimal Statistical Watermarking
Dec 13, 2023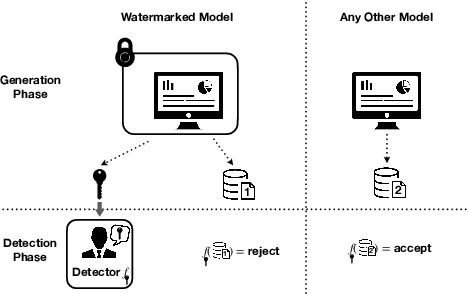
We study statistical watermarking by formulating it as a hypothesis testing problem, a general framework which subsumes all previous statistical watermarking methods. Key to our formulation is a coupling of the output tokens and the rejection region, realized by pseudo-random generators in practice, that allows non-trivial trade-off between the Type I error and Type II error. We characterize the Uniformly Most Powerful (UMP) watermark in this context. In the most common scenario where the output is a sequence of $n$ tokens, we establish matching upper and lower bounds on the number of i.i.d. tokens required to guarantee small Type I and Type II errors. Our rate scales as $\Theta(h^{-1} \log (1/h))$ with respect to the average entropy per token $h$ and thus greatly improves the $O(h^{-2})$ rate in the previous works. For scenarios where the detector lacks knowledge of the model's distribution, we introduce the concept of model-agnostic watermarking and establish the minimax bounds for the resultant increase in Type II error. Moreover, we formulate the robust watermarking problem where user is allowed to perform a class of perturbation on the generated texts, and characterize the optimal type II error of robust UMP tests via a linear programming problem. To the best of our knowledge, this is the first systematic statistical treatment on the watermarking problem with near-optimal rates in the i.i.d. setting, and might be of interest for future works.