 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-Shot Whole-Body Humanoid Control via Behavioral Foundation Models
Apr 15, 2025Unsupervised reinforcement learning (RL) aims at pre-training agents that can solve a wide range of downstream tasks in complex environments. Despite recent advancements, existing approaches suffer from several limitations: they may require running an RL process on each downstream task to achieve a satisfactory performance, they may need access to datasets with good coverage or well-curated task-specific samples, or they may pre-train policies with unsupervised losses that are poorly correlated with the downstream tasks of interest. In this paper, we introduce a novel algorithm regularizing unsupervised RL towards imitating trajectories from unlabeled behavior datasets. The key technical novelty of our method, called Forward-Backward Representations with Conditional-Policy Regularization, is to train forward-backward representations to embed the unlabeled trajectories to the same latent space used to represent states, rewards, and policies, and use a latent-conditional discriminator to encourage policies to ``cover'' the states in the unlabeled behavior dataset. As a result, we can learn policies that are well aligned with the behaviors in the dataset, while retaining zero-shot generalization capabilities for reward-based and imitation tasks. We demonstrate the effectiveness of this new approach in a challenging humanoid control problem: leveraging observation-only motion capture datasets, we train Meta Motivo, the first humanoid behavioral foundation model that can be prompted to solve a variety of whole-body tasks, including motion tracking, goal reaching, and reward optimization. The resulting model is capable of expressing human-like behaviors and it achieves competitive performance with task-specific methods while outperforming state-of-the-art unsupervised RL and model-based baselines.
Fast Adaptation with Behavioral Foundation Models
Apr 10, 2025Unsupervised zero-shot reinforcement learning (RL) has emerged as a powerful paradigm for pretraining behavioral foundation models (BFMs), enabling agents to solve a wide range of downstream tasks specified via reward functions in a zero-shot fashion, i.e., without additional test-time learning or planning. This is achieved by learning self-supervised task embeddings alongside corresponding near-optimal behaviors and incorporating an inference procedure to directly retrieve the latent task embedding and associated policy for any given reward function. Despite promising results, zero-shot policies are often suboptimal due to errors induced by the unsupervised training process, the embedding, and the inference procedure. In this paper, we focus on devising fast adaptation strategies to improve the zero-shot performance of BFMs in a few steps of online interaction with the environment while avoiding any performance drop during the adaptation process. Notably, we demonstrate that existing BFMs learn a set of skills containing more performant policies than those identified by their inference procedure, making them well-suited for fast adaptation. Motivated by this observation, we propose both actor-critic and actor-only fast adaptation strategies that search in the low-dimensional task-embedding space of the pre-trained BFM to rapidly improve the performance of its zero-shot policies on any downstream task. Notably, our approach mitigates the initial "unlearning" phase commonly observed when fine-tuning pre-trained RL models. We evaluate our fast adaptation strategies on top of four state-of-the-art zero-shot RL methods in multiple navigation and locomotion domains. Our results show that they achieve 10-40% improvement over their zero-shot performance in a few tens of episodes, outperforming existing baselines.
Token Assorted: Mixing Latent and Text Tokens for Improved Language Model Reasoning
Feb 05, 2025



Large Language Models (LLMs) excel at reasoning and planning when trained on chainof-thought (CoT) data, where the step-by-step thought process is explicitly outlined by text tokens. However, this results in lengthy inputs where many words support textual coherence rather than core reasoning information, and processing these inputs consumes substantial computation resources. In this work, we propose a hybrid representation of the reasoning process, where we partially abstract away the initial reasoning steps using latent discrete tokens generated by VQ-VAE, significantly reducing the length of reasoning traces. We explore the use of latent trace abstractions in two scenarios: 1) training the model from scratch for the Keys-Finding Maze problem, 2) fine-tuning LLMs on this hybrid data with an extended vocabulary including unseen latent tokens, for both logical and mathematical reasoning problems. To facilitate effective learning, we introduce a simple training procedure that randomly mixes latent and text tokens, which enables fast adaptation to new latent tokens. Our approach consistently outperforms the baselines methods in various benchmarks.
H-GAP: Humanoid Control with a Generalist Planner
Dec 05, 2023



Humanoid control is an important research challenge offering avenues for integration into human-centric infrastructures and enabling physics-driven humanoid animations. The daunting challenges in this field stem from the difficulty of optimizing in high-dimensional action spaces and the instability introduced by the bipedal morphology of humanoids. However, the extensive collection of human motion-captured data and the derived datasets of humanoid trajectories, such as MoCapAct, paves the way to tackle these challenges. In this context, we present Humanoid Generalist Autoencoding Planner (H-GAP), a state-action trajectory generative model trained on humanoid trajectories derived from human motion-captured data, capable of adeptly handling downstream control tasks with Model Predictive Control (MPC). For 56 degrees of freedom humanoid, we empirically demonstrate that H-GAP learns to represent and generate a wide range of motor behaviours. Further, without any learning from online interactions, it can also flexibly transfer these behaviors to solve novel downstream control tasks via planning. Notably, H-GAP excels established MPC baselines that have access to the ground truth dynamics model, and is superior or comparable to offline RL methods trained for individual tasks. Finally, we do a series of empirical studies on the scaling properties of H-GAP, showing the potential for performance gains via additional data but not computing. Code and videos are available at https://ycxuyingchen.github.io/hgap/.
IQL-TD-MPC: Implicit Q-Learning for Hierarchical Model Predictive Control
Jun 01, 2023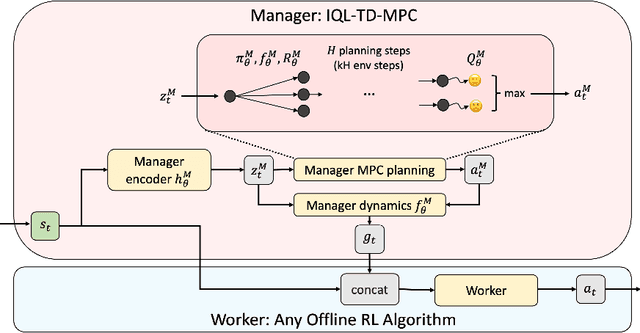
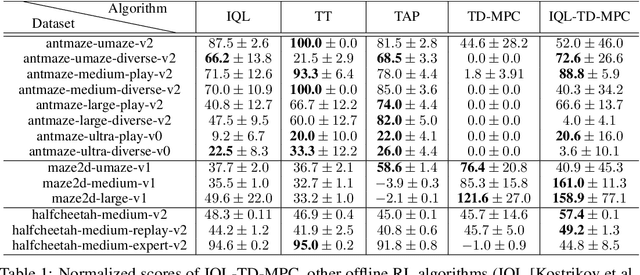

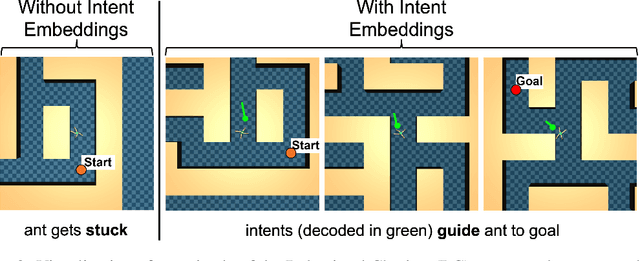
Model-based reinforcement learning (RL) has shown great promise due to its sample efficiency, but still struggles with long-horizon sparse-reward tasks, especially in offline settings where the agent learns from a fixed dataset. We hypothesize that model-based RL agents struggle in these environments due to a lack of long-term planning capabilities, and that planning in a temporally abstract model of the environment can alleviate this issue. In this paper, we make two key contributions: 1) we introduce an offline model-based RL algorithm, IQL-TD-MPC, that extends the state-of-the-art Temporal Difference Learning for Model Predictive Control (TD-MPC) with Implicit Q-Learning (IQL); 2) we propose to use IQL-TD-MPC as a Manager in a hierarchical setting with any off-the-shelf offline RL algorithm as a Worker. More specifically, we pre-train a temporally abstract IQL-TD-MPC Manager to predict "intent embeddings", which roughly correspond to subgoals, via planning. We empirically show that augmenting state representations with intent embeddings generated by an IQL-TD-MPC manager significantly improves off-the-shelf offline RL agents' performance on some of the most challenging D4RL benchmark tasks. For instance, the offline RL algorithms AWAC, TD3-BC, DT, and CQL all get zero or near-zero normalized evaluation scores on the medium and large antmaze tasks, while our modification gives an average score over 40.
Learning General World Models in a Handful of Reward-Free Deployments
Oct 23, 2022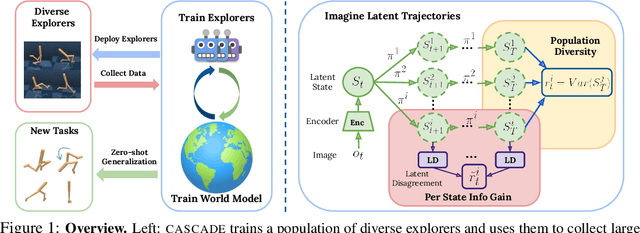
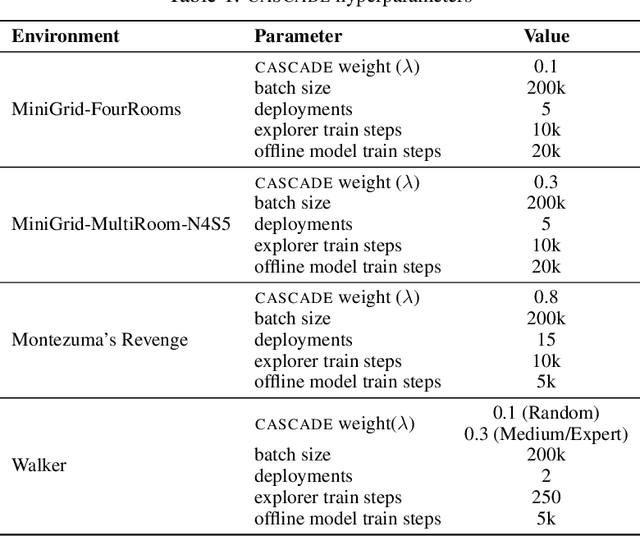
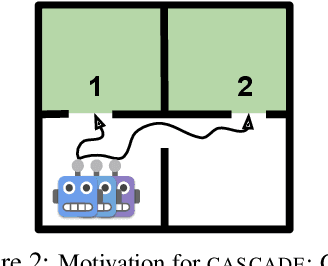
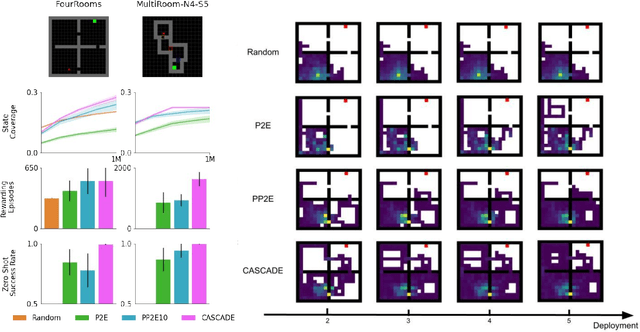
Building generally capable agents is a grand challenge for deep reinforcement learning (RL). To approach this challenge practically, we outline two key desiderata: 1) to facilitate generalization, exploration should be task agnostic; 2) to facilitate scalability, exploration policies should collect large quantities of data without costly centralized retraining. Combining these two properties, we introduce the reward-free deployment efficiency setting, a new paradigm for RL research. We then present CASCADE, a novel approach for self-supervised exploration in this new setting. CASCADE seeks to learn a world model by collecting data with a population of agents, using an information theoretic objective inspired by Bayesian Active Learning. CASCADE achieves this by specifically maximizing the diversity of trajectories sampled by the population through a novel cascading objective. We provide theoretical intuition for CASCADE which we show in a tabular setting improves upon na\"ive approaches that do not account for population diversity. We then demonstrate that CASCADE collects diverse task-agnostic datasets and learns agents that generalize zero-shot to novel, unseen downstream tasks on Atari, MiniGrid, Crafter and the DM Control Suite. Code and videos are available at https://ycxuyingchen.github.io/cascade/
Lsh-sampling Breaks the Computation Chicken-and-egg Loop in Adaptive Stochastic Gradient Estimation
Oct 30, 2019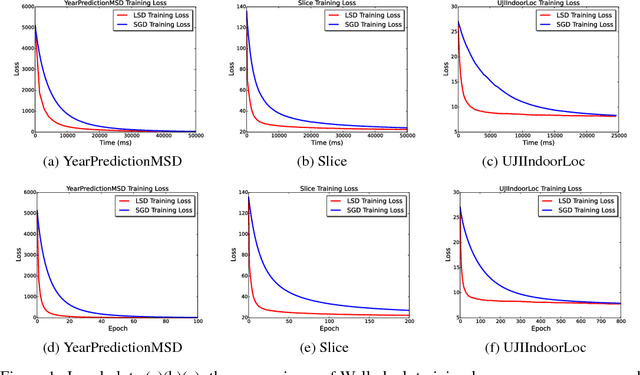
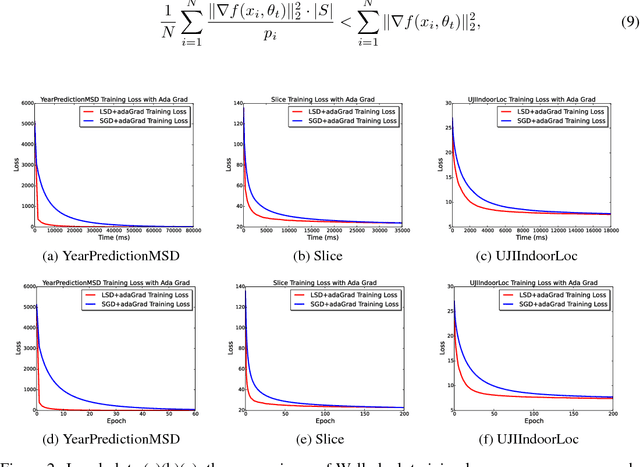
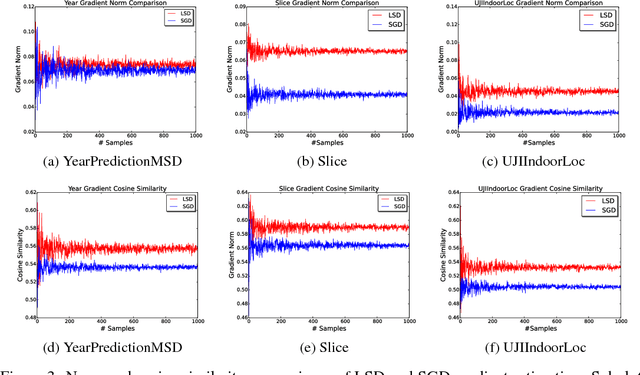
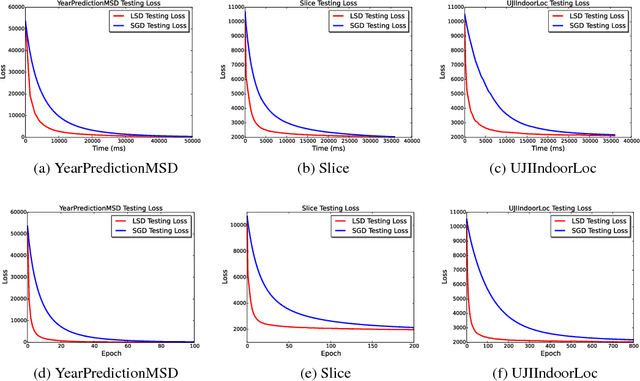
Stochastic Gradient Descent or SGD is the most popular optimization algorithm for large-scale problems. SGD estimates the gradient by uniform sampling with sample size one. There have been several other works that suggest faster epoch-wise convergence by using weighted non-uniform sampling for better gradient estimates. Unfortunately, the per-iteration cost of maintaining this adaptive distribution for gradient estimation is more than calculating the full gradient itself, which we call the chicken-and-the-egg loop. As a result, the false impression of faster convergence in iterations, in reality, leads to slower convergence in time. In this paper, we break this barrier by providing the first demonstration of a scheme, Locality sensitive hashing (LSH) sampled Stochastic Gradient Descent (LGD), which leads to superior gradient estimation while keeping the sampling cost per iteration similar to that of the uniform sampling. Such an algorithm is possible due to the sampling view of LSH, which came to light recently. As a consequence of superior and fast estimation, we reduce the running time of all existing gradient descent algorithms, that relies on gradient estimates including Adam, Ada-grad, etc. We demonstrate the effectiveness of our proposal with experiments on linear models as well as the non-linear BERT, which is a recent popular deep learning based language representation model.