 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompositional Planning with Jumpy World Models
Feb 23, 2026The ability to plan with temporal abstractions is central to intelligent decision-making. Rather than reasoning over primitive actions, we study agents that compose pre-trained policies as temporally extended actions, enabling solutions to complex tasks that no constituent alone can solve. Such compositional planning remains elusive as compounding errors in long-horizon predictions make it challenging to estimate the visitation distribution induced by sequencing policies. Motivated by the geometric policy composition framework introduced in arXiv:2206.08736, we address these challenges by learning predictive models of multi-step dynamics -- so-called jumpy world models -- that capture state occupancies induced by pre-trained policies across multiple timescales in an off-policy manner. Building on Temporal Difference Flows (arXiv:2503.09817), we enhance these models with a novel consistency objective that aligns predictions across timescales, improving long-horizon predictive accuracy. We further demonstrate how to combine these generative predictions to estimate the value of executing arbitrary sequences of policies over varying timescales. Empirically, we find that compositional planning with jumpy world models significantly improves zero-shot performance across a wide range of base policies on challenging manipulation and navigation tasks, yielding, on average, a 200% relative improvement over planning with primitive actions on long-horizon tasks.
BFM-Zero: A Promptable Behavioral Foundation Model for Humanoid Control Using Unsupervised Reinforcement Learning
Nov 06, 2025Building Behavioral Foundation Models (BFMs) for humanoid robots has the potential to unify diverse control tasks under a single, promptable generalist policy. However, existing approaches are either exclusively deployed on simulated humanoid characters, or specialized to specific tasks such as tracking. We propose BFM-Zero, a framework that learns an effective shared latent representation that embeds motions, goals, and rewards into a common space, enabling a single policy to be prompted for multiple downstream tasks without retraining. This well-structured latent space in BFM-Zero enables versatile and robust whole-body skills on a Unitree G1 humanoid in the real world, via diverse inference methods, including zero-shot motion tracking, goal reaching, and reward optimization, and few-shot optimization-based adaptation. Unlike prior on-policy reinforcement learning (RL) frameworks, BFM-Zero builds upon recent advancements in unsupervised RL and Forward-Backward (FB) models, which offer an objective-centric, explainable, and smooth latent representation of whole-body motions. We further extend BFM-Zero with critical reward shaping, domain randomization, and history-dependent asymmetric learning to bridge the sim-to-real gap. Those key design choices are quantitatively ablated in simulation. A first-of-its-kind model, BFM-Zero establishes a step toward scalable, promptable behavioral foundation models for whole-body humanoid control.
TD-JEPA: Latent-predictive Representations for Zero-Shot Reinforcement Learning
Oct 01, 2025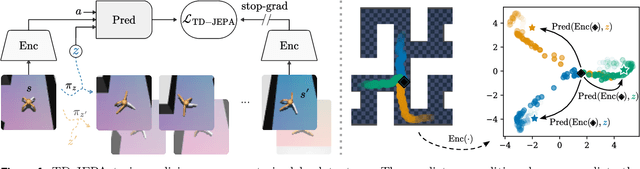



Latent prediction--where agents learn by predicting their own latents--has emerged as a powerful paradigm for training general representations in machine learning. In reinforcement learning (RL), this approach has been explored to define auxiliary losses for a variety of settings, including reward-based and unsupervised RL, behavior cloning, and world modeling. While existing methods are typically limited to single-task learning, one-step prediction, or on-policy trajectory data, we show that temporal difference (TD) learning enables learning representations predictive of long-term latent dynamics across multiple policies from offline, reward-free transitions. Building on this, we introduce TD-JEPA, which leverages TD-based latent-predictive representations into unsupervised RL. TD-JEPA trains explicit state and task encoders, a policy-conditioned multi-step predictor, and a set of parameterized policies directly in latent space. This enables zero-shot optimization of any reward function at test time. Theoretically, we show that an idealized variant of TD-JEPA avoids collapse with proper initialization, and learns encoders that capture a low-rank factorization of long-term policy dynamics, while the predictor recovers their successor features in latent space. Empirically, TD-JEPA matches or outperforms state-of-the-art baselines on locomotion, navigation, and manipulation tasks across 13 datasets in ExoRL and OGBench, especially in the challenging setting of zero-shot RL from pixels.
Zero-Shot Whole-Body Humanoid Control via Behavioral Foundation Models
Apr 15, 2025Unsupervised reinforcement learning (RL) aims at pre-training agents that can solve a wide range of downstream tasks in complex environments. Despite recent advancements, existing approaches suffer from several limitations: they may require running an RL process on each downstream task to achieve a satisfactory performance, they may need access to datasets with good coverage or well-curated task-specific samples, or they may pre-train policies with unsupervised losses that are poorly correlated with the downstream tasks of interest. In this paper, we introduce a novel algorithm regularizing unsupervised RL towards imitating trajectories from unlabeled behavior datasets. The key technical novelty of our method, called Forward-Backward Representations with Conditional-Policy Regularization, is to train forward-backward representations to embed the unlabeled trajectories to the same latent space used to represent states, rewards, and policies, and use a latent-conditional discriminator to encourage policies to ``cover'' the states in the unlabeled behavior dataset. As a result, we can learn policies that are well aligned with the behaviors in the dataset, while retaining zero-shot generalization capabilities for reward-based and imitation tasks. We demonstrate the effectiveness of this new approach in a challenging humanoid control problem: leveraging observation-only motion capture datasets, we train Meta Motivo, the first humanoid behavioral foundation model that can be prompted to solve a variety of whole-body tasks, including motion tracking, goal reaching, and reward optimization. The resulting model is capable of expressing human-like behaviors and it achieves competitive performance with task-specific methods while outperforming state-of-the-art unsupervised RL and model-based baselines.
Fast Adaptation with Behavioral Foundation Models
Apr 10, 2025Unsupervised zero-shot reinforcement learning (RL) has emerged as a powerful paradigm for pretraining behavioral foundation models (BFMs), enabling agents to solve a wide range of downstream tasks specified via reward functions in a zero-shot fashion, i.e., without additional test-time learning or planning. This is achieved by learning self-supervised task embeddings alongside corresponding near-optimal behaviors and incorporating an inference procedure to directly retrieve the latent task embedding and associated policy for any given reward function. Despite promising results, zero-shot policies are often suboptimal due to errors induced by the unsupervised training process, the embedding, and the inference procedure. In this paper, we focus on devising fast adaptation strategies to improve the zero-shot performance of BFMs in a few steps of online interaction with the environment while avoiding any performance drop during the adaptation process. Notably, we demonstrate that existing BFMs learn a set of skills containing more performant policies than those identified by their inference procedure, making them well-suited for fast adaptation. Motivated by this observation, we propose both actor-critic and actor-only fast adaptation strategies that search in the low-dimensional task-embedding space of the pre-trained BFM to rapidly improve the performance of its zero-shot policies on any downstream task. Notably, our approach mitigates the initial "unlearning" phase commonly observed when fine-tuning pre-trained RL models. We evaluate our fast adaptation strategies on top of four state-of-the-art zero-shot RL methods in multiple navigation and locomotion domains. Our results show that they achieve 10-40% improvement over their zero-shot performance in a few tens of episodes, outperforming existing baselines.
Temporal Difference Flows
Mar 12, 2025Predictive models of the future are fundamental for an agent's ability to reason and plan. A common strategy learns a world model and unrolls it step-by-step at inference, where small errors can rapidly compound. Geometric Horizon Models (GHMs) offer a compelling alternative by directly making predictions of future states, avoiding cumulative inference errors. While GHMs can be conveniently learned by a generative analog to temporal difference (TD) learning, existing methods are negatively affected by bootstrapping predictions at train time and struggle to generate high-quality predictions at long horizons. This paper introduces Temporal Difference Flows (TD-Flow), which leverages the structure of a novel Bellman equation on probability paths alongside flow-matching techniques to learn accurate GHMs at over 5x the horizon length of prior methods. Theoretically, we establish a new convergence result and primarily attribute TD-Flow's efficacy to reduced gradient variance during training. We further show that similar arguments can be extended to diffusion-based methods. Empirically, we validate TD-Flow across a diverse set of domains on both generative metrics and downstream tasks including policy evaluation. Moreover, integrating TD-Flow with recent behavior foundation models for planning over pre-trained policies demonstrates substantial performance gains, underscoring its promise for long-horizon decision-making.
Simple Ingredients for Offline Reinforcement Learning
Mar 19, 2024



Offline reinforcement learning algorithms have proven effective on datasets highly connected to the target downstream task. Yet, leveraging a novel testbed (MOOD) in which trajectories come from heterogeneous sources, we show that existing methods struggle with diverse data: their performance considerably deteriorates as data collected for related but different tasks is simply added to the offline buffer. In light of this finding, we conduct a large empirical study where we formulate and test several hypotheses to explain this failure. Surprisingly, we find that scale, more than algorithmic considerations, is the key factor influencing performance. We show that simple methods like AWAC and IQL with increased network size overcome the paradoxical failure modes from the inclusion of additional data in MOOD, and notably outperform prior state-of-the-art algorithms on the canonical D4RL benchmark.
Layered State Discovery for Incremental Autonomous Exploration
Feb 07, 2023

We study the autonomous exploration (AX) problem proposed by Lim & Auer (2012). In this setting, the objective is to discover a set of $\epsilon$-optimal policies reaching a set $\mathcal{S}_L^{\rightarrow}$ of incrementally $L$-controllable states. We introduce a novel layered decomposition of the set of incrementally $L$-controllable states that is based on the iterative application of a state-expansion operator. We leverage these results to design Layered Autonomous Exploration (LAE), a novel algorithm for AX that attains a sample complexity of $\tilde{\mathcal{O}}(LS^{\rightarrow}_{L(1+\epsilon)}\Gamma_{L(1+\epsilon)} A \ln^{12}(S^{\rightarrow}_{L(1+\epsilon)})/\epsilon^2)$, where $S^{\rightarrow}_{L(1+\epsilon)}$ is the number of states that are incrementally $L(1+\epsilon)$-controllable, $A$ is the number of actions, and $\Gamma_{L(1+\epsilon)}$ is the branching factor of the transitions over such states. LAE improves over the algorithm of Tarbouriech et al. (2020a) by a factor of $L^2$ and it is the first algorithm for AX that works in a countably-infinite state space. Moreover, we show that, under a certain identifiability assumption, LAE achieves minimax-optimal sample complexity of $\tilde{\mathcal{O}}(LS^{\rightarrow}_{L}A\ln^{12}(S^{\rightarrow}_{L})/\epsilon^2)$, outperforming existing algorithms and matching for the first time the lower bound proved by Cai et al. (2022) up to logarithmic factors.
On the Complexity of Representation Learning in Contextual Linear Bandits
Dec 19, 2022
In contextual linear bandits, the reward function is assumed to be a linear combination of an unknown reward vector and a given embedding of context-arm pairs. In practice, the embedding is often learned at the same time as the reward vector, thus leading to an online representation learning problem. Existing approaches to representation learning in contextual bandits are either very generic (e.g., model-selection techniques or algorithms for learning with arbitrary function classes) or specialized to particular structures (e.g., nested features or representations with certain spectral properties). As a result, the understanding of the cost of representation learning in contextual linear bandit is still limited. In this paper, we take a systematic approach to the problem and provide a comprehensive study through an instance-dependent perspective. We show that representation learning is fundamentally more complex than linear bandits (i.e., learning with a given representation). In particular, learning with a given set of representations is never simpler than learning with the worst realizable representation in the set, while we show cases where it can be arbitrarily harder. We complement this result with an extensive discussion of how it relates to existing literature and we illustrate positive instances where representation learning is as complex as learning with a fixed representation and where sub-logarithmic regret is achievable.
Improved Adaptive Algorithm for Scalable Active Learning with Weak Labeler
Nov 04, 2022



Active learning with strong and weak labelers considers a practical setting where we have access to both costly but accurate strong labelers and inaccurate but cheap predictions provided by weak labelers. We study this problem in the streaming setting, where decisions must be taken \textit{online}. We design a novel algorithmic template, Weak Labeler Active Cover (WL-AC), that is able to robustly leverage the lower quality weak labelers to reduce the query complexity while retaining the desired level of accuracy. Prior active learning algorithms with access to weak labelers learn a difference classifier which predicts where the weak labels differ from strong labelers; this requires the strong assumption of realizability of the difference classifier (Zhang and Chaudhuri,2015). WL-AC bypasses this \textit{realizability} assumption and thus is applicable to many real-world scenarios such as random corrupted weak labels and high dimensional family of difference classifiers (\textit{e.g.,} deep neural nets). Moreover, WL-AC cleverly trades off evaluating the quality with full exploitation of weak labelers, which allows to convert any active learning strategy to one that can leverage weak labelers. We provide an instantiation of this template that achieves the optimal query complexity for any given weak labeler, without knowing its accuracy a-priori. Empirically, we propose an instantiation of the WL-AC template that can be efficiently implemented for large-scale models (\textit{e.g}., deep neural nets) and show its effectiveness on the corrupted-MNIST dataset by significantly reducing the number of labels while keeping the same accuracy as in passive learning.