 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeveScale-FSDP: Flexible and High-Performance FSDP at Scale
Feb 25, 2026Fully Sharded Data Parallel (FSDP), also known as ZeRO, is widely used for training large-scale models, featuring its flexibility and minimal intrusion on model code. However, current FSDP systems struggle with structure-aware training methods (e.g., block-wise quantized training) and with non-element-wise optimizers (e.g., Shampoo and Muon) used in cutting-edge models (e.g., Gemini, Kimi K2). FSDP's fixed element- or row-wise sharding formats conflict with the block-structured computations. In addition, today's implementations fall short in communication and memory efficiency, limiting scaling to tens of thousands of GPUs. We introduce veScale-FSDP, a redesigned FSDP system that couples a flexible sharding format, RaggedShard, with a structure-aware planning algorithm to deliver both flexibility and performance at scale. veScale-FSDP natively supports efficient data placement required by FSDP, empowering block-wise quantization and non-element-wise optimizers. As a result, veScale-FSDP achieves 5~66% higher throughput and 16~30% lower memory usage than existing FSDP systems, while scaling efficiently to tens of thousands of GPUs.
Mesh-Attention: A New Communication-Efficient Distributed Attention with Improved Data Locality
Dec 24, 2025Distributed attention is a fundamental problem for scaling context window for Large Language Models (LLMs). The state-of-the-art method, Ring-Attention, suffers from scalability limitations due to its excessive communication traffic. This paper proposes a new distributed attention algorithm, Mesh-Attention, by rethinking the design space of distributed attention with a new matrix-based model. Our method assigns a two-dimensional tile -- rather than one-dimensional row or column -- of computation blocks to each GPU to achieve higher efficiency through lower communication-computation (CommCom) ratio. The general approach covers Ring-Attention as a special case, and allows the tuning of CommCom ratio with different tile shapes. Importantly, we propose a greedy algorithm that can efficiently search the scheduling space within the tile with restrictions that ensure efficient communication among GPUs. The theoretical analysis shows that Mesh-Attention leads to a much lower communication complexity and exhibits good scalability comparing to other current algorithms. Our extensive experiment results show that Mesh-Attention can achieve up to 3.4x speedup (2.9x on average) and reduce the communication volume by up to 85.4% (79.0% on average) on 256 GPUs. Our scalability results further demonstrate that Mesh-Attention sustains superior performance as the system scales, substantially reducing overhead in large-scale deployments. The results convincingly confirm the advantage of Mesh-Attention.
Seedance 1.5 pro: A Native Audio-Visual Joint Generation Foundation Model
Dec 23, 2025Recent strides in video generation have paved the way for unified audio-visual generation. In this work, we present Seedance 1.5 pro, a foundational model engineered specifically for native, joint audio-video generation. Leveraging a dual-branch Diffusion Transformer architecture, the model integrates a cross-modal joint module with a specialized multi-stage data pipeline, achieving exceptional audio-visual synchronization and superior generation quality. To ensure practical utility, we implement meticulous post-training optimizations, including Supervised Fine-Tuning (SFT) on high-quality datasets and Reinforcement Learning from Human Feedback (RLHF) with multi-dimensional reward models. Furthermore, we introduce an acceleration framework that boosts inference speed by over 10X. Seedance 1.5 pro distinguishes itself through precise multilingual and dialect lip-syncing, dynamic cinematic camera control, and enhanced narrative coherence, positioning it as a robust engine for professional-grade content creation. Seedance 1.5 pro is now accessible on Volcano Engine at https://console.volcengine.com/ark/region:ark+cn-beijing/experience/vision?type=GenVideo.
Virtual Width Networks
Nov 17, 2025



We introduce Virtual Width Networks (VWN), a framework that delivers the benefits of wider representations without incurring the quadratic cost of increasing the hidden size. VWN decouples representational width from backbone width, expanding the embedding space while keeping backbone compute nearly constant. In our large-scale experiment, an 8-times expansion accelerates optimization by over 2 times for next-token and 3 times for next-2-token prediction. The advantage amplifies over training as both the loss gap grows and the convergence-speedup ratio increases, showing that VWN is not only token-efficient but also increasingly effective with scale. Moreover, we identify an approximately log-linear scaling relation between virtual width and loss reduction, offering an initial empirical basis and motivation for exploring virtual-width scaling as a new dimension of large-model efficiency.
Laminar: A Scalable Asynchronous RL Post-Training Framework
Oct 14, 2025Reinforcement learning (RL) post-training for Large Language Models (LLMs) is now scaling to large clusters and running for extended durations to enhance model reasoning performance. However, the scalability of existing RL frameworks is limited, as extreme long-tail skewness in RL trajectory generation causes severe GPU underutilization. Current asynchronous RL systems attempt to mitigate this, but they rely on global weight synchronization between the actor and all rollouts, which creates a rigid model update schedule. This global synchronization is ill-suited for the highly skewed and evolving distribution of trajectory generation latency in RL training, crippling training efficiency. Our key insight is that efficient scaling requires breaking this lockstep through trajectory-level asynchrony, which generates and consumes each trajectory independently. We propose Laminar, a scalable and robust RL post-training system built on a fully decoupled architecture. First, we replace global updates with a tier of relay workers acting as a distributed parameter service. This enables asynchronous and fine-grained weight synchronization, allowing rollouts to pull the latest weight anytime without stalling the actor's training loop. Second, a dynamic repack mechanism consolidates long-tail trajectories onto a few dedicated rollouts, maximizing generation throughput. The fully decoupled design also isolates failures, ensuring robustness for long-running jobs. Our evaluation on a 1024-GPU cluster shows that Laminar achieves up to 5.48$\times$ training throughput speedup over state-of-the-art systems, while reducing model convergence time.
MegaScale-MoE: Large-Scale Communication-Efficient Training of Mixture-of-Experts Models in Production
May 19, 2025We present MegaScale-MoE, a production system tailored for the efficient training of large-scale mixture-of-experts (MoE) models. MoE emerges as a promising architecture to scale large language models (LLMs) to unprecedented sizes, thereby enhancing model performance. However, existing MoE training systems experience a degradation in training efficiency, exacerbated by the escalating scale of MoE models and the continuous evolution of hardware. Recognizing the pivotal role of efficient communication in enhancing MoE training, MegaScale-MoE customizes communication-efficient parallelism strategies for attention and FFNs in each MoE layer and adopts a holistic approach to overlap communication with computation at both inter- and intra-operator levels. Additionally, MegaScale-MoE applies communication compression with adjusted communication patterns to lower precision, further improving training efficiency. When training a 352B MoE model on 1,440 NVIDIA Hopper GPUs, MegaScale-MoE achieves a training throughput of 1.41M tokens/s, improving the efficiency by 1.88$\times$ compared to Megatron-LM. We share our operational experience in accelerating MoE training and hope that by offering our insights in system design, this work will motivate future research in MoE systems.
Seed1.5-VL Technical Report
May 11, 2025



We present Seed1.5-VL, a vision-language foundation model designed to advance general-purpose multimodal understanding and reasoning. Seed1.5-VL is composed with a 532M-parameter vision encoder and a Mixture-of-Experts (MoE) LLM of 20B active parameters. Despite its relatively compact architecture, it delivers strong performance across a wide spectrum of public VLM benchmarks and internal evaluation suites, achieving the state-of-the-art performance on 38 out of 60 public benchmarks. Moreover, in agent-centric tasks such as GUI control and gameplay, Seed1.5-VL outperforms leading multimodal systems, including OpenAI CUA and Claude 3.7. Beyond visual and video understanding, it also demonstrates strong reasoning abilities, making it particularly effective for multimodal reasoning challenges such as visual puzzles. We believe these capabilities will empower broader applications across diverse tasks. In this report, we mainly provide a comprehensive review of our experiences in building Seed1.5-VL across model design, data construction, and training at various stages, hoping that this report can inspire further research. Seed1.5-VL is now accessible at https://www.volcengine.com/ (Volcano Engine Model ID: doubao-1-5-thinking-vision-pro-250428)
OVERLORD: Ultimate Scaling of DataLoader for Multi-Source Large Foundation Model Training
Apr 14, 2025Modern frameworks for training large foundation models (LFMs) employ data loaders in a data parallel paradigm. While this design offers implementation simplicity, it introduces two fundamental challenges. First, due to the quadratic computational complexity of the attention operator, the non-uniform sample distribution over data-parallel ranks leads to a significant workload imbalance among loaders, which degrades the training efficiency. This paradigm also impedes the implementation of data mixing algorithms (e.g., curriculum learning) over different datasets. Second, to acquire a broad range of capability, LFMs training ingests data from diverse sources, each with distinct file access states. Colocating massive datasets within loader instances can easily exceed local pod memory capacity. Additionally, heavy sources with higher transformation latency require larger worker pools, further exacerbating memory consumption. We present OVERLORD, an industrial-grade distributed data loading architecture with three innovations: (1) A centralized and declarative data plane, which facilitates elastic data orchestration strategy, such as long-short context, multimodal, and curriculum learning; (2) Disaggregated multisource preprocessing through role-specific actors, i.e., Source Loaders and Data Constructors, leveraging autoscaling for Source Loaders towards heterogeneous and evolving source preprocessing cost; (3) Shadow Loaders with differential checkpointing for uninterrupted fault recovery. Deployed on production clusters scaling to multi-thousand GPU, OVERLORD achieves: (1) 4.5x end-to-end training throughput improvement, (2) a minimum 3.6x reduction in CPU memory usage, with further improvements to be added in later experiments.
Seaweed-7B: Cost-Effective Training of Video Generation Foundation Model
Apr 11, 2025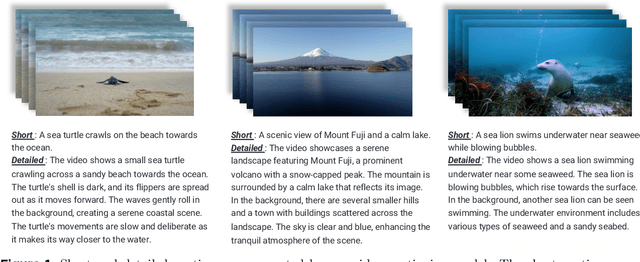
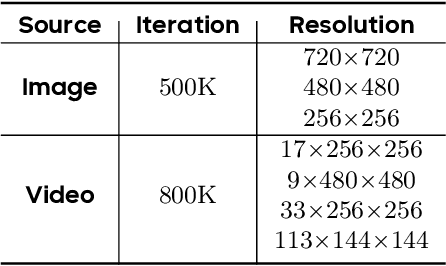
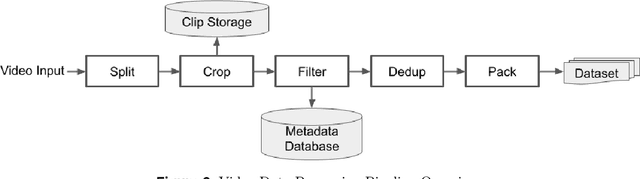

This technical report presents a cost-efficient strategy for training a video generation foundation model. We present a mid-sized research model with approximately 7 billion parameters (7B) called Seaweed-7B trained from scratch using 665,000 H100 GPU hours. Despite being trained with moderate computational resources, Seaweed-7B demonstrates highly competitive performance compared to contemporary video generation models of much larger size. Design choices are especially crucial in a resource-constrained setting. This technical report highlights the key design decisions that enhance the performance of the medium-sized diffusion model. Empirically, we make two observations: (1) Seaweed-7B achieves performance comparable to, or even surpasses, larger models trained on substantially greater GPU resources, and (2) our model, which exhibits strong generalization ability, can be effectively adapted across a wide range of downstream applications either by lightweight fine-tuning or continue training. See the project page at https://seaweed.video/
Goku: Flow Based Video Generative Foundation Models
Feb 10, 2025



This paper introduces Goku, a state-of-the-art family of joint image-and-video generation models leveraging rectified flow Transformers to achieve industry-leading performance. We detail the foundational elements enabling high-quality visual generation, including the data curation pipeline, model architecture design, flow formulation, and advanced infrastructure for efficient and robust large-scale training. The Goku models demonstrate superior performance in both qualitative and quantitative evaluations, setting new benchmarks across major tasks. Specifically, Goku achieves 0.76 on GenEval and 83.65 on DPG-Bench for text-to-image generation, and 84.85 on VBench for text-to-video tasks. We believe that this work provides valuable insights and practical advancements for the research community in developing joint image-and-video generation models.