 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent Forensics in Next-Generation Mobile Networks: Evidence, Methods, and Applications
Mar 31, 2026This survey examines intelligent forensics in next-generation mobile networks, arguing that future wireless security must move beyond real-time detection toward accountable post-incident reconstruction. Unlike traditional digital forensics, wireless investigations rely on short-lived, distributed, and heterogeneous evidence, including radio waveforms, channel measurements, device-side artifacts, and network telemetry, affected by calibration, timing uncertainty, privacy constraints, and adversarial manipulation. To address this limitation, this paper develops an evidence-centric framework that treats wireless measurements as first-class forensic artifacts and organizes the field through a unified taxonomy spanning physical-layer, device-layer, network-layer, and cross-layer forensics. We further systematize the forensic workflow into readiness and preservation-by-design, acquisition, correlation and analysis, and reporting and reproducibility, while comparing the complementary roles of traditional methods and artificial intelligence-assisted techniques. Subsequently, we review major application areas, including anomaly discovery, attribution, provenance and localization, authenticity verification, and timeline reconstruction. Finally, we identify key open challenges, including domain shift, resource-aware evidence capture, and the benefits and admissibility risks of generative evidence. Overall, this paper positions wireless forensics as a foundational capability for trustworthy, auditable, and reproducible security in next-generation wireless systems. Readers can understand and streamline wireless forensics processes for specific applications, such as low-altitude wireless networks, vehicular communications, and edge general intelligence.
Disrupting Vision-Language Model-Driven Navigation Services via Adversarial Object Fusion
May 29, 2025We present Adversarial Object Fusion (AdvOF), a novel attack framework targeting vision-and-language navigation (VLN) agents in service-oriented environments by generating adversarial 3D objects. While foundational models like Large Language Models (LLMs) and Vision Language Models (VLMs) have enhanced service-oriented navigation systems through improved perception and decision-making, their integration introduces vulnerabilities in mission-critical service workflows. Existing adversarial attacks fail to address service computing contexts, where reliability and quality-of-service (QoS) are paramount. We utilize AdvOF to investigate and explore the impact of adversarial environments on the VLM-based perception module of VLN agents. In particular, AdvOF first precisely aggregates and aligns the victim object positions in both 2D and 3D space, defining and rendering adversarial objects. Then, we collaboratively optimize the adversarial object with regularization between the adversarial and victim object across physical properties and VLM perceptions. Through assigning importance weights to varying views, the optimization is processed stably and multi-viewedly by iterative fusions from local updates and justifications. Our extensive evaluations demonstrate AdvOF can effectively degrade agent performance under adversarial conditions while maintaining minimal interference with normal navigation tasks. This work advances the understanding of service security in VLM-powered navigation systems, providing computational foundations for robust service composition in physical-world deployments.
OVERLORD: Ultimate Scaling of DataLoader for Multi-Source Large Foundation Model Training
Apr 14, 2025Modern frameworks for training large foundation models (LFMs) employ data loaders in a data parallel paradigm. While this design offers implementation simplicity, it introduces two fundamental challenges. First, due to the quadratic computational complexity of the attention operator, the non-uniform sample distribution over data-parallel ranks leads to a significant workload imbalance among loaders, which degrades the training efficiency. This paradigm also impedes the implementation of data mixing algorithms (e.g., curriculum learning) over different datasets. Second, to acquire a broad range of capability, LFMs training ingests data from diverse sources, each with distinct file access states. Colocating massive datasets within loader instances can easily exceed local pod memory capacity. Additionally, heavy sources with higher transformation latency require larger worker pools, further exacerbating memory consumption. We present OVERLORD, an industrial-grade distributed data loading architecture with three innovations: (1) A centralized and declarative data plane, which facilitates elastic data orchestration strategy, such as long-short context, multimodal, and curriculum learning; (2) Disaggregated multisource preprocessing through role-specific actors, i.e., Source Loaders and Data Constructors, leveraging autoscaling for Source Loaders towards heterogeneous and evolving source preprocessing cost; (3) Shadow Loaders with differential checkpointing for uninterrupted fault recovery. Deployed on production clusters scaling to multi-thousand GPU, OVERLORD achieves: (1) 4.5x end-to-end training throughput improvement, (2) a minimum 3.6x reduction in CPU memory usage, with further improvements to be added in later experiments.
Preventing Non-intrusive Load Monitoring Privacy Invasion: A Precise Adversarial Attack Scheme for Networked Smart Meters
Dec 22, 2024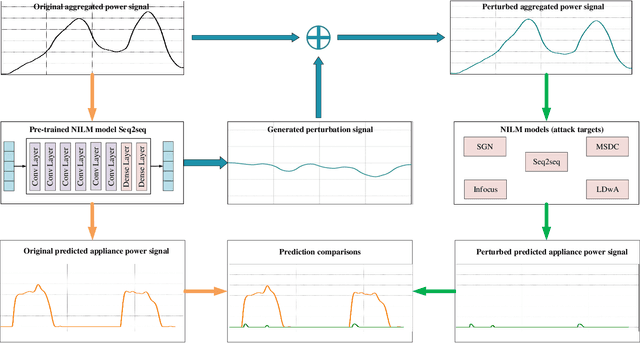

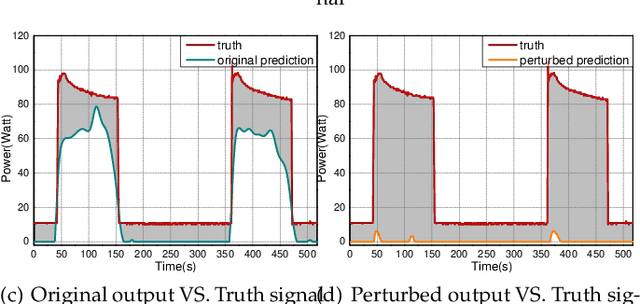
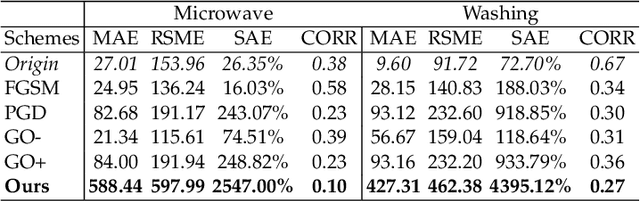
Smart grid, through networked smart meters employing the non-intrusive load monitoring (NILM) technique, can considerably discern the usage patterns of residential appliances. However, this technique also incurs privacy leakage. To address this issue, we propose an innovative scheme based on adversarial attack in this paper. The scheme effectively prevents NILM models from violating appliance-level privacy, while also ensuring accurate billing calculation for users. To achieve this objective, we overcome two primary challenges. First, as NILM models fall under the category of time-series regression models, direct application of traditional adversarial attacks designed for classification tasks is not feasible. To tackle this issue, we formulate a novel adversarial attack problem tailored specifically for NILM and providing a theoretical foundation for utilizing the Jacobian of the NILM model to generate imperceptible perturbations. Leveraging the Jacobian, our scheme can produce perturbations, which effectively misleads the signal prediction of NILM models to safeguard users' appliance-level privacy. The second challenge pertains to fundamental utility requirements, where existing adversarial attack schemes struggle to achieve accurate billing calculation for users. To handle this problem, we introduce an additional constraint, mandating that the sum of added perturbations within a billing period must be precisely zero. Experimental validation on real-world power datasets REDD and UK-DALE demonstrates the efficacy of our proposed solutions, which can significantly amplify the discrepancy between the output of the targeted NILM model and the actual power signal of appliances, and enable accurate billing at the same time. Additionally, our solutions exhibit transferability, making the generated perturbation signal from one target model applicable to other diverse NILM models.
TransTroj: Transferable Backdoor Attacks to Pre-trained Models via Embedding Indistinguishability
Jan 29, 2024Pre-trained models (PTMs) are extensively utilized in various downstream tasks. Adopting untrusted PTMs may suffer from backdoor attacks, where the adversary can compromise the downstream models by injecting backdoors into the PTM. However, existing backdoor attacks to PTMs can only achieve partially task-agnostic and the embedded backdoors are easily erased during the fine-tuning process. In this paper, we propose a novel transferable backdoor attack, TransTroj, to simultaneously meet functionality-preserving, durable, and task-agnostic. In particular, we first formalize transferable backdoor attacks as the indistinguishability problem between poisoned and clean samples in the embedding space. We decompose the embedding indistinguishability into pre- and post-indistinguishability, representing the similarity of the poisoned and reference embeddings before and after the attack. Then, we propose a two-stage optimization that separately optimizes triggers and victim PTMs to achieve embedding indistinguishability. We evaluate TransTroj on four PTMs and six downstream tasks. Experimental results show that TransTroj significantly outperforms SOTA task-agnostic backdoor attacks (18%$\sim$99%, 68% on average) and exhibits superior performance under various system settings. The code is available at https://github.com/haowang-cqu/TransTroj .
S-T CRF: Spatial-Temporal Conditional Random Field for Human Trajectory Prediction
Nov 30, 2023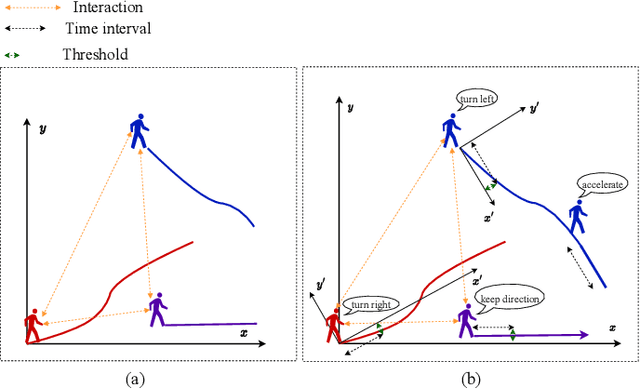
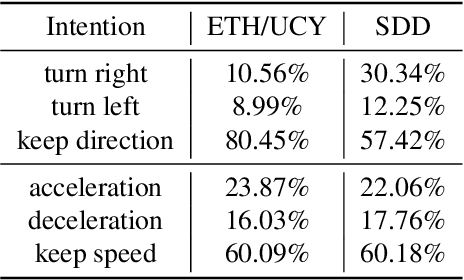
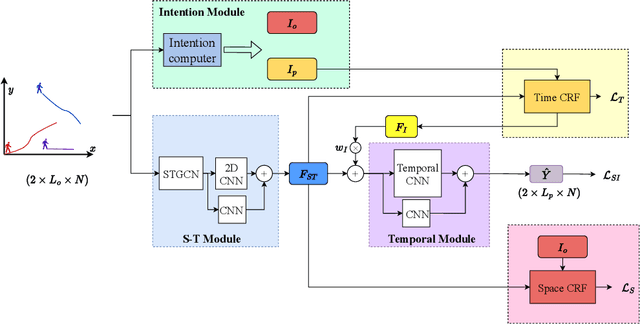
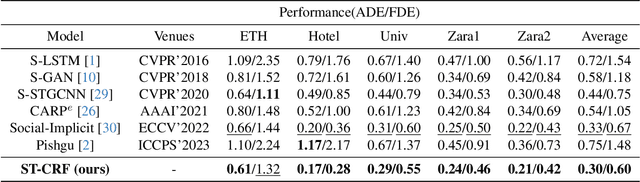
Trajectory prediction is of significant importance in computer vision. Accurate pedestrian trajectory prediction benefits autonomous vehicles and robots in planning their motion. Pedestrians' trajectories are greatly influenced by their intentions. Prior studies having introduced various deep learning methods only pay attention to the spatial and temporal information of trajectory, overlooking the explicit intention information. In this study, we introduce a novel model, termed the \textbf{S-T CRF}: \textbf{S}patial-\textbf{T}emporal \textbf{C}onditional \textbf{R}andom \textbf{F}ield, which judiciously incorporates intention information besides spatial and temporal information of trajectory. This model uses a Conditional Random Field (CRF) to generate a representation of future intentions, greatly improving the prediction of subsequent trajectories when combined with spatial-temporal representation. Furthermore, the study innovatively devises a space CRF loss and a time CRF loss, meticulously designed to enhance interaction constraints and temporal dynamics, respectively. Extensive experimental evaluations on dataset ETH/UCY and SDD demonstrate that the proposed method surpasses existing baseline approaches.
MSDC: Exploiting Multi-State Power Consumption in Non-intrusive Load Monitoring based on A Dual-CNN Model
Feb 11, 2023



Non-intrusive load monitoring (NILM) aims to decompose aggregated electrical usage signal into appliance-specific power consumption and it amounts to a classical example of blind source separation tasks. Leveraging recent progress on deep learning techniques, we design a new neural NILM model Multi-State Dual CNN (MSDC). Different from previous models, MSDC explicitly extracts information about the appliance's multiple states and state transitions, which in turn regulates the prediction of signals for appliances. More specifically, we employ a dual-CNN architecture: one CNN for outputting state distributions and the other for predicting the power of each state. A new technique is invented that utilizes conditional random fields (CRF) to capture state transitions. Experiments on two real-world datasets REDD and UK-DALE demonstrate that our model significantly outperform state-of-the-art models while having good generalization capacity, achieving 6%-10% MAE gain and 33%-51% SAE gain to unseen appliances.