 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeS-T CRF: Spatial-Temporal Conditional Random Field for Human Trajectory Prediction
Nov 30, 2023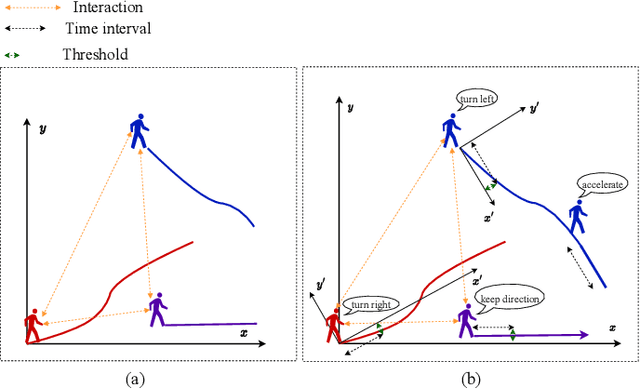
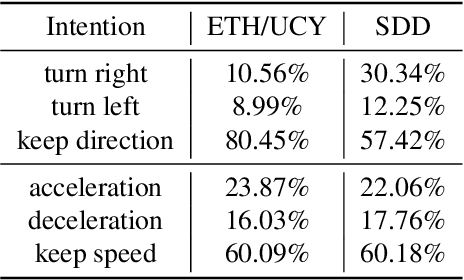
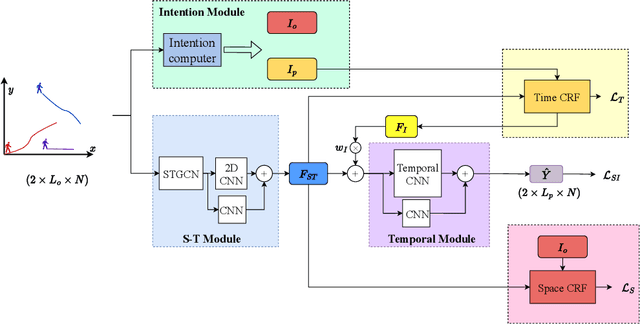
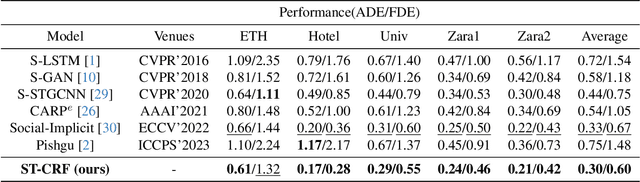
Trajectory prediction is of significant importance in computer vision. Accurate pedestrian trajectory prediction benefits autonomous vehicles and robots in planning their motion. Pedestrians' trajectories are greatly influenced by their intentions. Prior studies having introduced various deep learning methods only pay attention to the spatial and temporal information of trajectory, overlooking the explicit intention information. In this study, we introduce a novel model, termed the \textbf{S-T CRF}: \textbf{S}patial-\textbf{T}emporal \textbf{C}onditional \textbf{R}andom \textbf{F}ield, which judiciously incorporates intention information besides spatial and temporal information of trajectory. This model uses a Conditional Random Field (CRF) to generate a representation of future intentions, greatly improving the prediction of subsequent trajectories when combined with spatial-temporal representation. Furthermore, the study innovatively devises a space CRF loss and a time CRF loss, meticulously designed to enhance interaction constraints and temporal dynamics, respectively. Extensive experimental evaluations on dataset ETH/UCY and SDD demonstrate that the proposed method surpasses existing baseline approaches.
Graph Federated Learning Based on the Decentralized Framework
Jul 19, 2023



Graph learning has a wide range of applications in many scenarios, which require more need for data privacy. Federated learning is an emerging distributed machine learning approach that leverages data from individual devices or data centers to improve the accuracy and generalization of the model, while also protecting the privacy of user data. Graph-federated learning is mainly based on the classical federated learning framework i.e., the Client-Server framework. However, the Client-Server framework faces problems such as a single point of failure of the central server and poor scalability of network topology. First, we introduce the decentralized framework to graph-federated learning. Second, determine the confidence among nodes based on the similarity of data among nodes, subsequently, the gradient information is then aggregated by linear weighting based on confidence. Finally, the proposed method is compared with FedAvg, Fedprox, GCFL, and GCFL+ to verify the effectiveness of the proposed method. Experiments demonstrate that the proposed method outperforms other methods.