 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynchronous Signal Temporal Logic for Decidable Verification of Cyber-Physical Systems
Mar 26, 2026Many Cyber Physical System (CPS) work in a safety-critical environment, where correct execution, reliability and trustworthiness are essential. Signal Temporal Logic (STL) provides a formal framework for checking safety-critical CPS. However, static verification of STL is undecidable in general, except when we want to verify using run-time-based methods, which have limitations. We propose Synchronous Signal Temporal Logic (SSTL), a decidable fragment of STL, which admits static safety and liveness property verification. In SSTL, we assume that a signal is sampled at fixed discrete steps, called ticks, and then propose a hypothesis, called the Signal Invariance Hypothesis (SIH), which is inspired by a similar hypothesis for synchronous programs. We define the syntax and semantics of SSTL and show that SIH is a necessary and sufficient condition for equivalence between an STL formula and its SSTL counterpart. By translating SSTL to LTL_P (LTL defined over predicates), we enable decidable model checking using the SPIN model checker. We demonstrate the approach on a 33-node human heart model and other case studies.
The Future of Software Engineering in an AI-Driven World
Jun 11, 2024
A paradigm shift is underway in Software Engineering, with AI systems such as LLMs gaining increasing importance for improving software development productivity. This trend is anticipated to persist. In the next five years, we will likely see an increasing symbiotic partnership between human developers and AI. The Software Engineering research community cannot afford to overlook this trend; we must address the key research challenges posed by the integration of AI into the software development process. In this paper, we present our vision of the future of software development in an AI-Driven world and explore the key challenges that our research community should address to realize this vision.
S-T CRF: Spatial-Temporal Conditional Random Field for Human Trajectory Prediction
Nov 30, 2023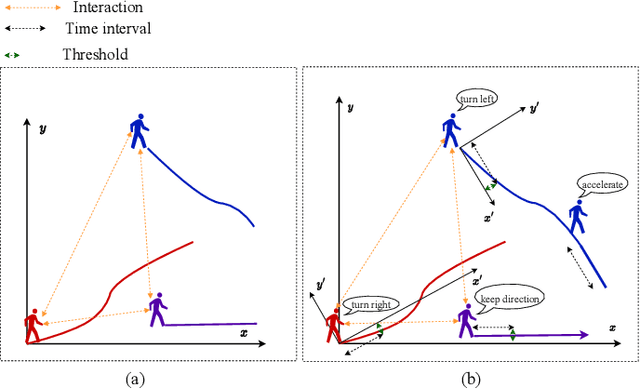
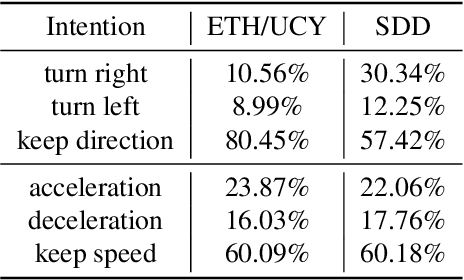
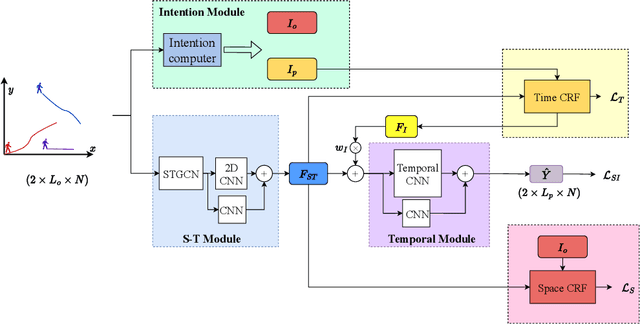
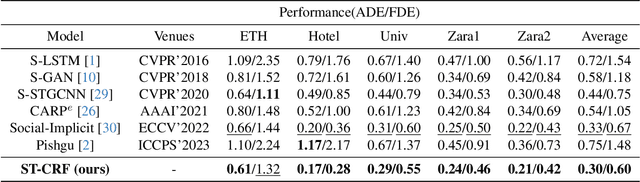
Trajectory prediction is of significant importance in computer vision. Accurate pedestrian trajectory prediction benefits autonomous vehicles and robots in planning their motion. Pedestrians' trajectories are greatly influenced by their intentions. Prior studies having introduced various deep learning methods only pay attention to the spatial and temporal information of trajectory, overlooking the explicit intention information. In this study, we introduce a novel model, termed the \textbf{S-T CRF}: \textbf{S}patial-\textbf{T}emporal \textbf{C}onditional \textbf{R}andom \textbf{F}ield, which judiciously incorporates intention information besides spatial and temporal information of trajectory. This model uses a Conditional Random Field (CRF) to generate a representation of future intentions, greatly improving the prediction of subsequent trajectories when combined with spatial-temporal representation. Furthermore, the study innovatively devises a space CRF loss and a time CRF loss, meticulously designed to enhance interaction constraints and temporal dynamics, respectively. Extensive experimental evaluations on dataset ETH/UCY and SDD demonstrate that the proposed method surpasses existing baseline approaches.
STF: Spatial Temporal Fusion for Trajectory Prediction
Nov 29, 2023



Trajectory prediction is a challenging task that aims to predict the future trajectory of vehicles or pedestrians over a short time horizon based on their historical positions. The main reason is that the trajectory is a kind of complex data, including spatial and temporal information, which is crucial for accurate prediction. Intuitively, the more information the model can capture, the more precise the future trajectory can be predicted. However, previous works based on deep learning methods processed spatial and temporal information separately, leading to inadequate spatial information capture, which means they failed to capture the complete spatial information. Therefore, it is of significance to capture information more fully and effectively on vehicle interactions. In this study, we introduced an integrated 3D graph that incorporates both spatial and temporal edges. Based on this, we proposed the integrated 3D graph, which considers the cross-time interaction information. In specific, we design a Spatial-Temporal Fusion (STF) model including Multi-layer perceptions (MLP) and Graph Attention (GAT) to capture the spatial and temporal information historical trajectories simultaneously on the 3D graph. Our experiment on the ApolloScape Trajectory Datasets shows that the proposed STF outperforms several baseline methods, especially on the long-time-horizon trajectory prediction.
Runtime Monitoring and Statistical Approaches for Correlation Analysis of ECG and PPG
Jan 20, 2022Biophysical signals such as Electrocardiogram (ECG) and Photoplethysmogram (PPG) are key to the sensing of vital parameters for wellbeing. Coincidentally, ECG and PPG are signals, which provide a "different window" into the same phenomena, namely the cardiac cycle. While they are used separately, there are no studies regarding the exact correction of the different ECG and PPG events. Such correlation would be helpful in many fronts such as sensor fusion for improved accuracy using cheaper sensors and attack detection and mitigation methods using multiple signals to enhance the robustness, for example. Considering this, we present the first approach in formally establishing the key relationships between ECG and PPG signals. We combine formal run-time monitoring with statistical analysis and regression analysis for our results.