 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMBD: A Model-Based Debiasing Framework Across User, Content, and Model Dimensions
Mar 15, 2026Modern recommendation systems rank candidates by aggregating multiple behavioral signals through a value model. However, many commonly used signals are inherently affected by heterogeneous biases. For example, watch time naturally favors long-form content, loop rate favors short - form content, and comment probability favors videos over images. Such biases introduce two critical issues: (1) value model scores may be systematically misaligned with users' relative preferences - for instance, a seemingly low absolute like probability may represent exceptionally strong interest for a user who rarely engages; and (2) changes in value modeling rules can trigger abrupt and undesirable ecosystem shifts. In this work, we ask a fundamental question: can biased behavioral signals be systematically transformed into unbiased signals, under a user - defined notion of ``unbiasedness'', that are both personalized and adaptive? We propose a general, model-based debiasing (MBD) framework that addresses this challenge by augmenting it with distributional modeling. By conditioning on a flexible subset of features (partial feature set), we explicitly estimate the contextual mean and variance of the engagement distribution for arbitrary cohorts (e.g., specific video lengths or user regions) directly alongside the main prediction. This integration allows the framework to convert biased raw signals into unbiased representations, enabling the construction of higher-level, calibrated signals (such as percentiles or z - scores) suitable for the value model. Importantly, the definition of unbiasedness is flexible and controllable, allowing the system to adapt to different personalization objectives and modeling preferences. Crucially, this is implemented as a lightweight, built-in branch of the existing MTML ranking model, requiring no separate serving infrastructure.
GRLoc: Geometric Representation Regression for Visual Localization
Nov 17, 2025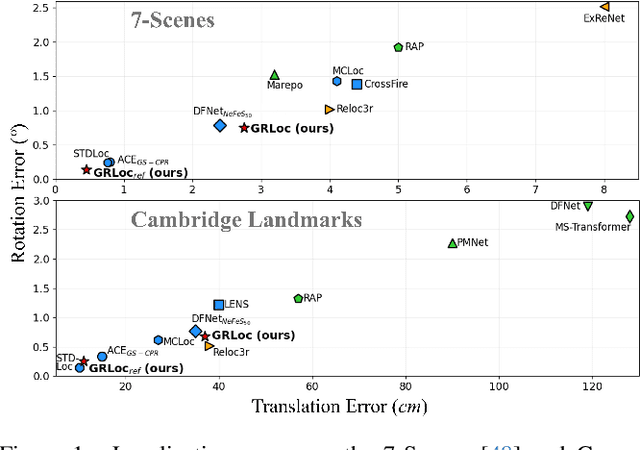
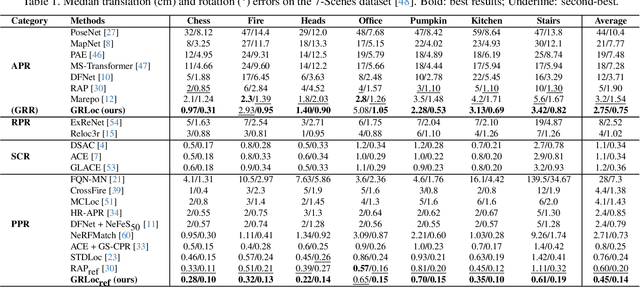
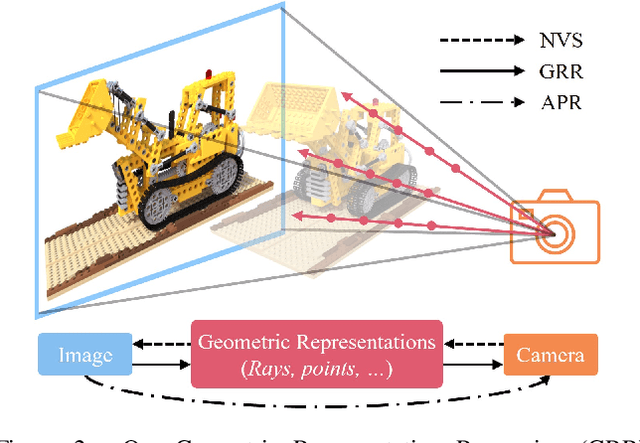
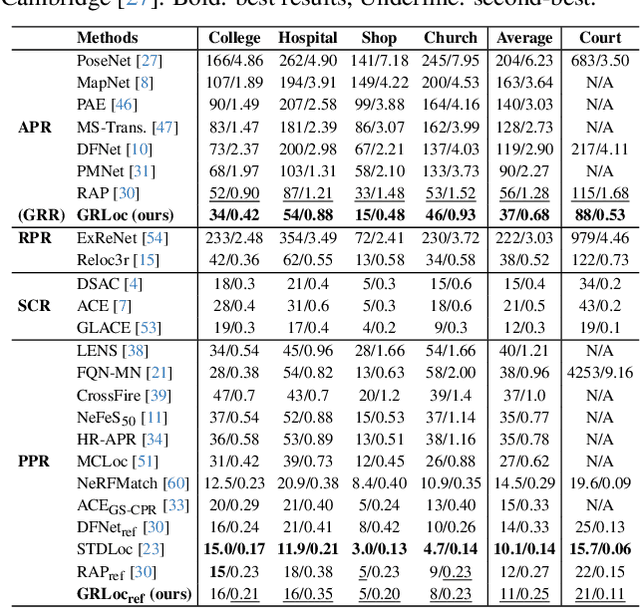
Absolute Pose Regression (APR) has emerged as a compelling paradigm for visual localization. However, APR models typically operate as black boxes, directly regressing a 6-DoF pose from a query image, which can lead to memorizing training views rather than understanding 3D scene geometry. In this work, we propose a geometrically-grounded alternative. Inspired by novel view synthesis, which renders images from intermediate geometric representations, we reformulate APR as its inverse that regresses the underlying 3D representations directly from the image, and we name this paradigm Geometric Representation Regression (GRR). Our model explicitly predicts two disentangled geometric representations in the world coordinate system: (1) a ray bundle's directions to estimate camera rotation, and (2) a corresponding pointmap to estimate camera translation. The final 6-DoF camera pose is then recovered from these geometric components using a differentiable deterministic solver. This disentangled approach, which separates the learned visual-to-geometry mapping from the final pose calculation, introduces a strong geometric prior into the network. We find that the explicit decoupling of rotation and translation predictions measurably boosts performance. We demonstrate state-of-the-art performance on 7-Scenes and Cambridge Landmarks datasets, validating that modeling the inverse rendering process is a more robust path toward generalizable absolute pose estimation.
RLGS: Reinforcement Learning-Based Adaptive Hyperparameter Tuning for Gaussian Splatting
Aug 06, 2025



Hyperparameter tuning in 3D Gaussian Splatting (3DGS) is a labor-intensive and expert-driven process, often resulting in inconsistent reconstructions and suboptimal results. We propose RLGS, a plug-and-play reinforcement learning framework for adaptive hyperparameter tuning in 3DGS through lightweight policy modules, dynamically adjusting critical hyperparameters such as learning rates and densification thresholds. The framework is model-agnostic and seamlessly integrates into existing 3DGS pipelines without architectural modifications. We demonstrate its generalization ability across multiple state-of-the-art 3DGS variants, including Taming-3DGS and 3DGS-MCMC, and validate its robustness across diverse datasets. RLGS consistently enhances rendering quality. For example, it improves Taming-3DGS by 0.7dB PSNR on the Tanks and Temple (TNT) dataset, under a fixed Gaussian budget, and continues to yield gains even when baseline performance saturates. Our results suggest that RLGS provides an effective and general solution for automating hyperparameter tuning in 3DGS training, bridging a gap in applying reinforcement learning to 3DGS.
HunyuanWorld 1.0: Generating Immersive, Explorable, and Interactive 3D Worlds from Words or Pixels
Jul 29, 2025



Creating immersive and playable 3D worlds from texts or images remains a fundamental challenge in computer vision and graphics. Existing world generation approaches typically fall into two categories: video-based methods that offer rich diversity but lack 3D consistency and rendering efficiency, and 3D-based methods that provide geometric consistency but struggle with limited training data and memory-inefficient representations. To address these limitations, we present HunyuanWorld 1.0, a novel framework that combines the best of both worlds for generating immersive, explorable, and interactive 3D scenes from text and image conditions. Our approach features three key advantages: 1) 360{\deg} immersive experiences via panoramic world proxies; 2) mesh export capabilities for seamless compatibility with existing computer graphics pipelines; 3) disentangled object representations for augmented interactivity. The core of our framework is a semantically layered 3D mesh representation that leverages panoramic images as 360{\deg} world proxies for semantic-aware world decomposition and reconstruction, enabling the generation of diverse 3D worlds. Extensive experiments demonstrate that our method achieves state-of-the-art performance in generating coherent, explorable, and interactive 3D worlds while enabling versatile applications in virtual reality, physical simulation, game development, and interactive content creation.
NTIRE 2025 Challenge on Image Super-Resolution ($\times$4): Methods and Results
Apr 20, 2025This paper presents the NTIRE 2025 image super-resolution ($\times$4) challenge, one of the associated competitions of the 10th NTIRE Workshop at CVPR 2025. The challenge aims to recover high-resolution (HR) images from low-resolution (LR) counterparts generated through bicubic downsampling with a $\times$4 scaling factor. The objective is to develop effective network designs or solutions that achieve state-of-the-art SR performance. To reflect the dual objectives of image SR research, the challenge includes two sub-tracks: (1) a restoration track, emphasizes pixel-wise accuracy and ranks submissions based on PSNR; (2) a perceptual track, focuses on visual realism and ranks results by a perceptual score. A total of 286 participants registered for the competition, with 25 teams submitting valid entries. This report summarizes the challenge design, datasets, evaluation protocol, the main results, and methods of each team. The challenge serves as a benchmark to advance the state of the art and foster progress in image SR.
The Tenth NTIRE 2025 Image Denoising Challenge Report
Apr 16, 2025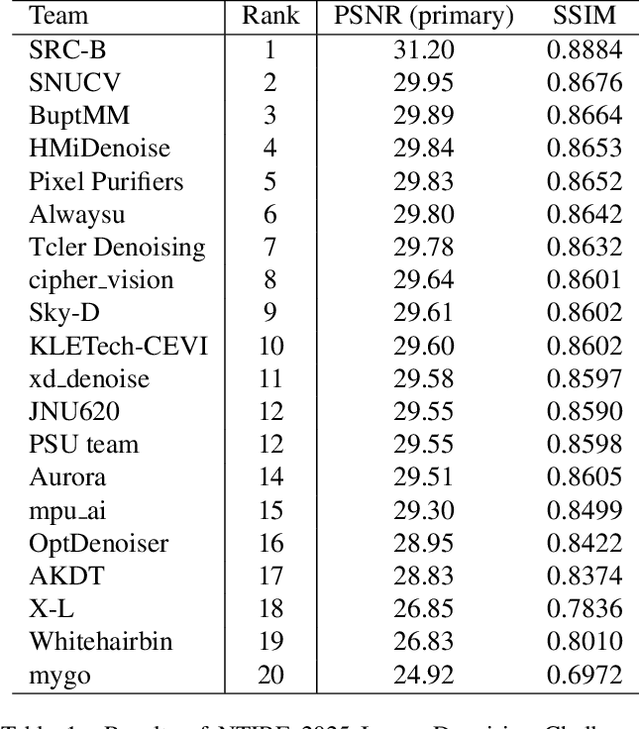


This paper presents an overview of the NTIRE 2025 Image Denoising Challenge ({\sigma} = 50), highlighting the proposed methodologies and corresponding results. The primary objective is to develop a network architecture capable of achieving high-quality denoising performance, quantitatively evaluated using PSNR, without constraints on computational complexity or model size. The task assumes independent additive white Gaussian noise (AWGN) with a fixed noise level of 50. A total of 290 participants registered for the challenge, with 20 teams successfully submitting valid results, providing insights into the current state-of-the-art in image denoising.
NTIRE 2025 Challenge on Event-Based Image Deblurring: Methods and Results
Apr 16, 2025This paper presents an overview of NTIRE 2025 the First Challenge on Event-Based Image Deblurring, detailing the proposed methodologies and corresponding results. The primary goal of the challenge is to design an event-based method that achieves high-quality image deblurring, with performance quantitatively assessed using Peak Signal-to-Noise Ratio (PSNR). Notably, there are no restrictions on computational complexity or model size. The task focuses on leveraging both events and images as inputs for single-image deblurring. A total of 199 participants registered, among whom 15 teams successfully submitted valid results, offering valuable insights into the current state of event-based image deblurring. We anticipate that this challenge will drive further advancements in event-based vision research.
The Tenth NTIRE 2025 Efficient Super-Resolution Challenge Report
Apr 14, 2025This paper presents a comprehensive review of the NTIRE 2025 Challenge on Single-Image Efficient Super-Resolution (ESR). The challenge aimed to advance the development of deep models that optimize key computational metrics, i.e., runtime, parameters, and FLOPs, while achieving a PSNR of at least 26.90 dB on the $\operatorname{DIV2K\_LSDIR\_valid}$ dataset and 26.99 dB on the $\operatorname{DIV2K\_LSDIR\_test}$ dataset. A robust participation saw \textbf{244} registered entrants, with \textbf{43} teams submitting valid entries. This report meticulously analyzes these methods and results, emphasizing groundbreaking advancements in state-of-the-art single-image ESR techniques. The analysis highlights innovative approaches and establishes benchmarks for future research in the field.
Hunyuan3D 2.0: Scaling Diffusion Models for High Resolution Textured 3D Assets Generation
Jan 21, 2025



We present Hunyuan3D 2.0, an advanced large-scale 3D synthesis system for generating high-resolution textured 3D assets. This system includes two foundation components: a large-scale shape generation model -- Hunyuan3D-DiT, and a large-scale texture synthesis model -- Hunyuan3D-Paint. The shape generative model, built on a scalable flow-based diffusion transformer, aims to create geometry that properly aligns with a given condition image, laying a solid foundation for downstream applications. The texture synthesis model, benefiting from strong geometric and diffusion priors, produces high-resolution and vibrant texture maps for either generated or hand-crafted meshes. Furthermore, we build Hunyuan3D-Studio -- a versatile, user-friendly production platform that simplifies the re-creation process of 3D assets. It allows both professional and amateur users to manipulate or even animate their meshes efficiently. We systematically evaluate our models, showing that Hunyuan3D 2.0 outperforms previous state-of-the-art models, including the open-source models and closed-source models in geometry details, condition alignment, texture quality, and etc. Hunyuan3D 2.0 is publicly released in order to fill the gaps in the open-source 3D community for large-scale foundation generative models. The code and pre-trained weights of our models are available at: https://github.com/Tencent/Hunyuan3D-2
Membership Inference Attacks against Large Vision-Language Models
Nov 05, 2024



Large vision-language models (VLLMs) exhibit promising capabilities for processing multi-modal tasks across various application scenarios. However, their emergence also raises significant data security concerns, given the potential inclusion of sensitive information, such as private photos and medical records, in their training datasets. Detecting inappropriately used data in VLLMs remains a critical and unresolved issue, mainly due to the lack of standardized datasets and suitable methodologies. In this study, we introduce the first membership inference attack (MIA) benchmark tailored for various VLLMs to facilitate training data detection. Then, we propose a novel MIA pipeline specifically designed for token-level image detection. Lastly, we present a new metric called MaxR\'enyi-K%, which is based on the confidence of the model output and applies to both text and image data. We believe that our work can deepen the understanding and methodology of MIAs in the context of VLLMs. Our code and datasets are available at https://github.com/LIONS-EPFL/VL-MIA.