 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiV-GS: LiDAR-Vision Integration for 3D Gaussian Splatting SLAM in Outdoor Environments
Nov 19, 2024We present LiV-GS, a LiDAR-visual SLAM system in outdoor environments that leverages 3D Gaussian as a differentiable spatial representation. Notably, LiV-GS is the first method that directly aligns discrete and sparse LiDAR data with continuous differentiable Gaussian maps in large-scale outdoor scenes, overcoming the limitation of fixed resolution in traditional LiDAR mapping. The system aligns point clouds with Gaussian maps using shared covariance attributes for front-end tracking and integrates the normal orientation into the loss function to refines the Gaussian map. To reliably and stably update Gaussians outside the LiDAR field of view, we introduce a novel conditional Gaussian constraint that aligns these Gaussians closely with the nearest reliable ones. The targeted adjustment enables LiV-GS to achieve fast and accurate mapping with novel view synthesis at a rate of 7.98 FPS. Extensive comparative experiments demonstrate LiV-GS's superior performance in SLAM, image rendering and mapping. The successful cross-modal radar-LiDAR localization highlights the potential of LiV-GS for applications in cross-modal semantic positioning and object segmentation with Gaussian maps.
Get It For Free: Radar Segmentation without Expert Labels and Its Application in Odometry and Localization
Sep 27, 2024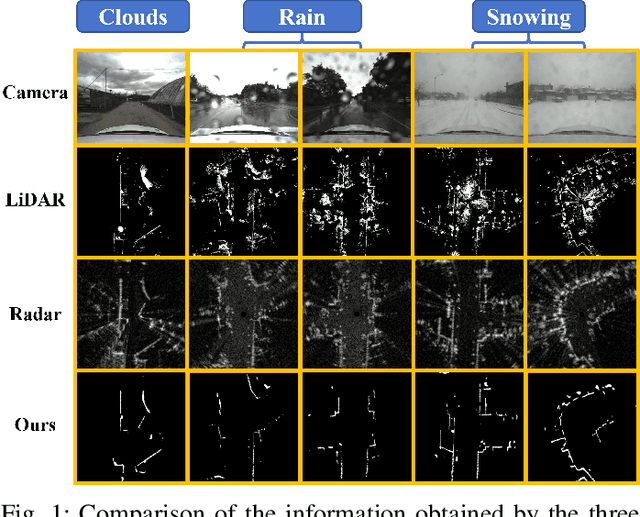


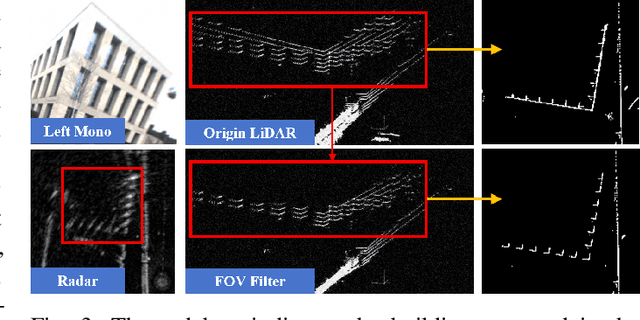
This paper presents a novel weakly supervised semantic segmentation method for radar segmentation, where the existing LiDAR semantic segmentation models are employed to generate semantic labels, which then serve as supervision signals for training a radar semantic segmentation model. The obtained radar semantic segmentation model outperforms LiDAR-based models, providing more consistent and robust segmentation under all-weather conditions, particularly in the snow, rain and fog. To mitigate potential errors in LiDAR semantic labels, we design a dedicated refinement scheme that corrects erroneous labels based on structural features and distribution patterns. The semantic information generated by our radar segmentation model is used in two downstream tasks, achieving significant performance improvements. In large-scale radar-based localization using OpenStreetMap, it leads to localization error reduction by 20.55\% over prior methods. For the odometry task, it improves translation accuracy by 16.4\% compared to the second-best method, securing the first place in the radar odometry competition at the Radar in Robotics workshop of ICRA 2024, Japan
EFEAR-4D: Ego-Velocity Filtering for Efficient and Accurate 4D radar Odometry
May 16, 2024
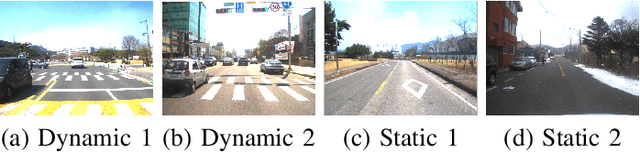
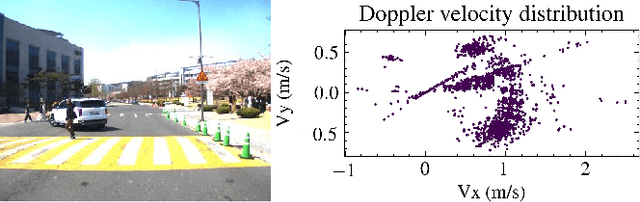

Odometry is a crucial component for successfully implementing autonomous navigation, relying on sensors such as cameras, LiDARs and IMUs. However, these sensors may encounter challenges in extreme weather conditions, such as snowfall and fog. The emergence of FMCW radar technology offers the potential for robust perception in adverse conditions. As the latest generation of FWCW radars, the 4D mmWave radar provides point cloud with range, azimuth, elevation, and Doppler velocity information, despite inherent sparsity and noises in the point cloud. In this paper, we propose EFEAR-4D, an accurate, highly efficient, and learning-free method for large-scale 4D radar odometry estimation. EFEAR-4D exploits Doppler velocity information delicately for robust ego-velocity estimation, resulting in a highly accurate prior guess. EFEAR-4D maintains robustness against point-cloud sparsity and noises across diverse environments through dynamic object removal and effective region-wise feature extraction. Extensive experiments on two publicly available 4D radar datasets demonstrate state-of-the-art reliability and localization accuracy of EFEAR-4D under various conditions. Furthermore, we have collected a dataset following the same route but varying installation heights of the 4D radar, emphasizing the significant impact of radar height on point cloud quality - a crucial consideration for real-world deployments. Our algorithm and dataset will be available soon at https://github.com/CLASS-Lab/EFEAR-4D.