 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGet It For Free: Radar Segmentation without Expert Labels and Its Application in Odometry and Localization
Paper and Code
Sep 27, 2024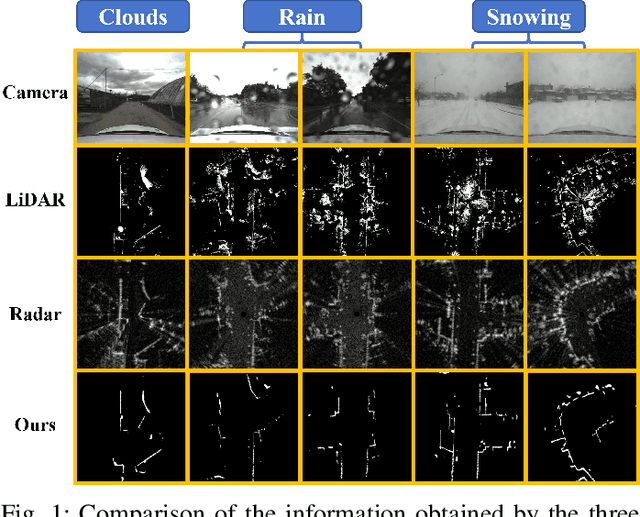


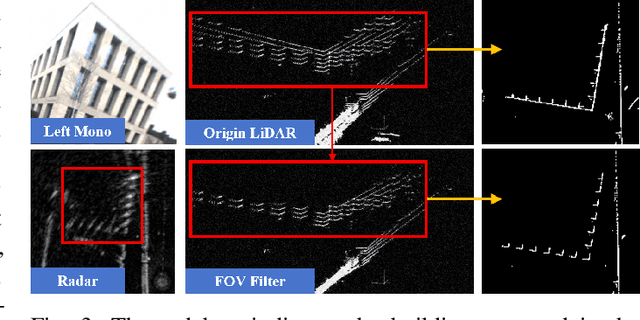
This paper presents a novel weakly supervised semantic segmentation method for radar segmentation, where the existing LiDAR semantic segmentation models are employed to generate semantic labels, which then serve as supervision signals for training a radar semantic segmentation model. The obtained radar semantic segmentation model outperforms LiDAR-based models, providing more consistent and robust segmentation under all-weather conditions, particularly in the snow, rain and fog. To mitigate potential errors in LiDAR semantic labels, we design a dedicated refinement scheme that corrects erroneous labels based on structural features and distribution patterns. The semantic information generated by our radar segmentation model is used in two downstream tasks, achieving significant performance improvements. In large-scale radar-based localization using OpenStreetMap, it leads to localization error reduction by 20.55\% over prior methods. For the odometry task, it improves translation accuracy by 16.4\% compared to the second-best method, securing the first place in the radar odometry competition at the Radar in Robotics workshop of ICRA 2024, Japan