 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Feedback-Guided Optimal Learning for Wireless Interactive Panoramic Scene Delivery
Feb 06, 2026Immersive applications such as virtual and augmented reality impose stringent requirements on frame rate, latency, and synchronization between physical and virtual environments. To meet these requirements, an edge server must render panoramic content, predict user head motion, and transmit a portion of the scene that is large enough to cover the user viewport while remaining within wireless bandwidth constraints. Each portion produces two feedback signals: prediction feedback, indicating whether the selected portion covers the actual viewport, and transmission feedback, indicating whether the corresponding packets are successfully delivered. Prior work models this problem as a multi-armed bandit with two-level bandit feedback, but fails to exploit the fact that prediction feedback can be retrospectively computed for all candidate portions once the user head pose is observed. As a result, prediction feedback constitutes full-information feedback rather than bandit feedback. Motivated by this observation, we introduce a two-level hybrid feedback model that combines full-information and bandit feedback, and formulate the portion selection problem as an online learning task under this setting. We derive an instance-dependent regret lower bound for the hybrid feedback model and propose AdaPort, a hybrid learning algorithm that leverages both feedback types to improve learning efficiency. We further establish an instance-dependent regret upper bound that matches the lower bound asymptotically, and demonstrate through real-world trace driven simulations that AdaPort consistently outperforms state-of-the-art baseline methods.
On the Regularity and Fairness of Combinatorial Multi-Armed Bandit
Sep 15, 2025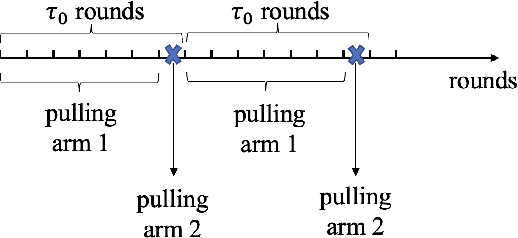
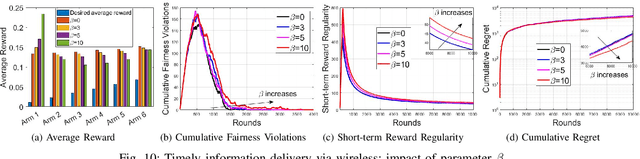
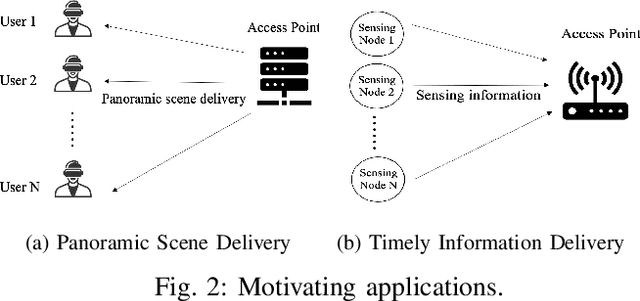
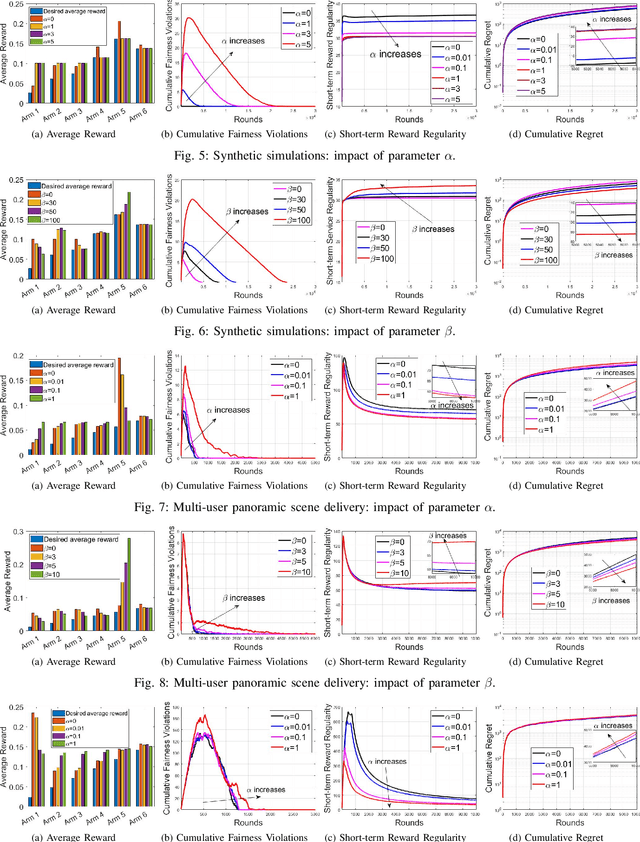
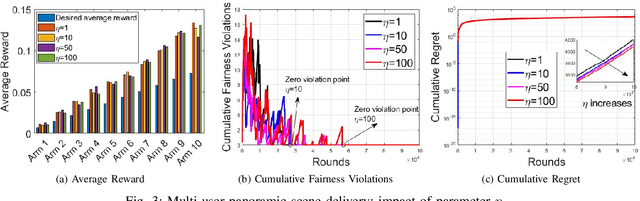
The combinatorial multi-armed bandit model is designed to maximize cumulative rewards in the presence of uncertainty by activating a subset of arms in each round. This paper is inspired by two critical applications in wireless networks, where it's not only essential to maximize cumulative rewards but also to guarantee fairness among arms (i.e., the minimum average reward required by each arm) and ensure reward regularity (i.e., how often each arm receives the reward). In this paper, we propose a parameterized regular and fair learning algorithm to achieve these three objectives. In particular, the proposed algorithm linearly combines virtual queue-lengths (tracking the fairness violations), Time-Since-Last-Reward (TSLR) metrics, and Upper Confidence Bound (UCB) estimates in its weight measure. Here, TSLR is similar to age-of-information and measures the elapsed number of rounds since the last time an arm received a reward, capturing the reward regularity performance, and UCB estimates are utilized to balance the tradeoff between exploration and exploitation in online learning. By exploring a key relationship between virtual queue-lengths and TSLR metrics and utilizing several non-trivial Lyapunov functions, we analytically characterize zero cumulative fairness violation, reward regularity, and cumulative regret performance under our proposed algorithm. These theoretical outcomes are verified by simulations based on two real-world datasets.
4D-ROLLS: 4D Radar Occupancy Learning via LiDAR Supervision
May 20, 2025



A comprehensive understanding of 3D scenes is essential for autonomous vehicles (AVs), and among various perception tasks, occupancy estimation plays a central role by providing a general representation of drivable and occupied space. However, most existing occupancy estimation methods rely on LiDAR or cameras, which perform poorly in degraded environments such as smoke, rain, snow, and fog. In this paper, we propose 4D-ROLLS, the first weakly supervised occupancy estimation method for 4D radar using the LiDAR point cloud as the supervisory signal. Specifically, we introduce a method for generating pseudo-LiDAR labels, including occupancy queries and LiDAR height maps, as multi-stage supervision to train the 4D radar occupancy estimation model. Then the model is aligned with the occupancy map produced by LiDAR, fine-tuning its accuracy in occupancy estimation. Extensive comparative experiments validate the exceptional performance of 4D-ROLLS. Its robustness in degraded environments and effectiveness in cross-dataset training are qualitatively demonstrated. The model is also seamlessly transferred to downstream tasks BEV segmentation and point cloud occupancy prediction, highlighting its potential for broader applications. The lightweight network enables 4D-ROLLS model to achieve fast inference speeds at about 30 Hz on a 4060 GPU. The code of 4D-ROLLS will be made available at https://github.com/CLASS-Lab/4D-ROLLS.
Deep Reinforcement Learning for Day-to-day Dynamic Tolling in Tradable Credit Schemes
Apr 10, 2025Tradable credit schemes (TCS) are an increasingly studied alternative to congestion pricing, given their revenue neutrality and ability to address issues of equity through the initial credit allocation. Modeling TCS to aid future design and implementation is associated with challenges involving user and market behaviors, demand-supply dynamics, and control mechanisms. In this paper, we focus on the latter and address the day-to-day dynamic tolling problem under TCS, which is formulated as a discrete-time Markov Decision Process and solved using reinforcement learning (RL) algorithms. Our results indicate that RL algorithms achieve travel times and social welfare comparable to the Bayesian optimization benchmark, with generalization across varying capacities and demand levels. We further assess the robustness of RL under different hyperparameters and apply regularization techniques to mitigate action oscillation, which generates practical tolling strategies that are transferable under day-to-day demand and supply variability. Finally, we discuss potential challenges such as scaling to large networks, and show how transfer learning can be leveraged to improve computational efficiency and facilitate the practical deployment of RL-based TCS solutions.
LLMER: Crafting Interactive Extended Reality Worlds with JSON Data Generated by Large Language Models
Feb 04, 2025



The integration of Large Language Models (LLMs) like GPT-4 with Extended Reality (XR) technologies offers the potential to build truly immersive XR environments that interact with human users through natural language, e.g., generating and animating 3D scenes from audio inputs. However, the complexity of XR environments makes it difficult to accurately extract relevant contextual data and scene/object parameters from an overwhelming volume of XR artifacts. It leads to not only increased costs with pay-per-use models, but also elevated levels of generation errors. Moreover, existing approaches focusing on coding script generation are often prone to generation errors, resulting in flawed or invalid scripts, application crashes, and ultimately a degraded user experience. To overcome these challenges, we introduce LLMER, a novel framework that creates interactive XR worlds using JSON data generated by LLMs. Unlike prior approaches focusing on coding script generation, LLMER translates natural language inputs into JSON data, significantly reducing the likelihood of application crashes and processing latency. It employs a multi-stage strategy to supply only the essential contextual information adapted to the user's request and features multiple modules designed for various XR tasks. Our preliminary user study reveals the effectiveness of the proposed system, with over 80% reduction in consumed tokens and around 60% reduction in task completion time compared to state-of-the-art approaches. The analysis of users' feedback also illuminates a series of directions for further optimization.
On the Low-Complexity of Fair Learning for Combinatorial Multi-Armed Bandit
Jan 04, 2025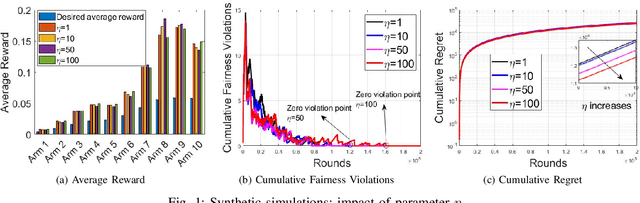
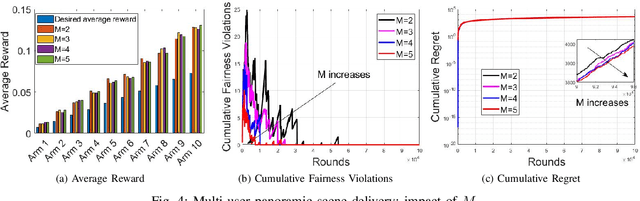
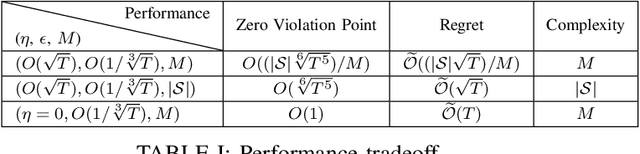
Combinatorial Multi-Armed Bandit with fairness constraints is a framework where multiple arms form a super arm and can be pulled in each round under uncertainty to maximize cumulative rewards while ensuring the minimum average reward required by each arm. The existing pessimistic-optimistic algorithm linearly combines virtual queue-lengths (tracking the fairness violations) and Upper Confidence Bound estimates as a weight for each arm and selects a super arm with the maximum total weight. The number of super arms could be exponential to the number of arms in many scenarios. In wireless networks, interference constraints can cause the number of super arms to grow exponentially with the number of arms. Evaluating all the feasible super arms to find the one with the maximum total weight can incur extremely high computational complexity in the pessimistic-optimistic algorithm. To avoid this, we develop a low-complexity fair learning algorithm based on the so-called pick-and-compare approach that involves randomly picking $M$ feasible super arms to evaluate. By setting $M$ to a constant, the number of comparison steps in the pessimistic-optimistic algorithm can be reduced to a constant, thereby significantly reducing the computational complexity. Our theoretical proof shows this low-complexity design incurs only a slight sacrifice in fairness and regret performance. Finally, we validate the theoretical result by extensive simulations.
EFEAR-4D: Ego-Velocity Filtering for Efficient and Accurate 4D radar Odometry
May 16, 2024
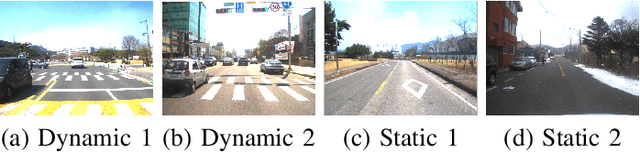
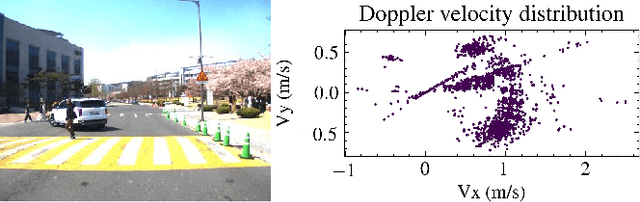

Odometry is a crucial component for successfully implementing autonomous navigation, relying on sensors such as cameras, LiDARs and IMUs. However, these sensors may encounter challenges in extreme weather conditions, such as snowfall and fog. The emergence of FMCW radar technology offers the potential for robust perception in adverse conditions. As the latest generation of FWCW radars, the 4D mmWave radar provides point cloud with range, azimuth, elevation, and Doppler velocity information, despite inherent sparsity and noises in the point cloud. In this paper, we propose EFEAR-4D, an accurate, highly efficient, and learning-free method for large-scale 4D radar odometry estimation. EFEAR-4D exploits Doppler velocity information delicately for robust ego-velocity estimation, resulting in a highly accurate prior guess. EFEAR-4D maintains robustness against point-cloud sparsity and noises across diverse environments through dynamic object removal and effective region-wise feature extraction. Extensive experiments on two publicly available 4D radar datasets demonstrate state-of-the-art reliability and localization accuracy of EFEAR-4D under various conditions. Furthermore, we have collected a dataset following the same route but varying installation heights of the 4D radar, emphasizing the significant impact of radar height on point cloud quality - a crucial consideration for real-world deployments. Our algorithm and dataset will be available soon at https://github.com/CLASS-Lab/EFEAR-4D.
RH-Map: Online Map Construction Framework of Dynamic Objects Removal Based on Region-wise Hash Map Structure
Jul 02, 2023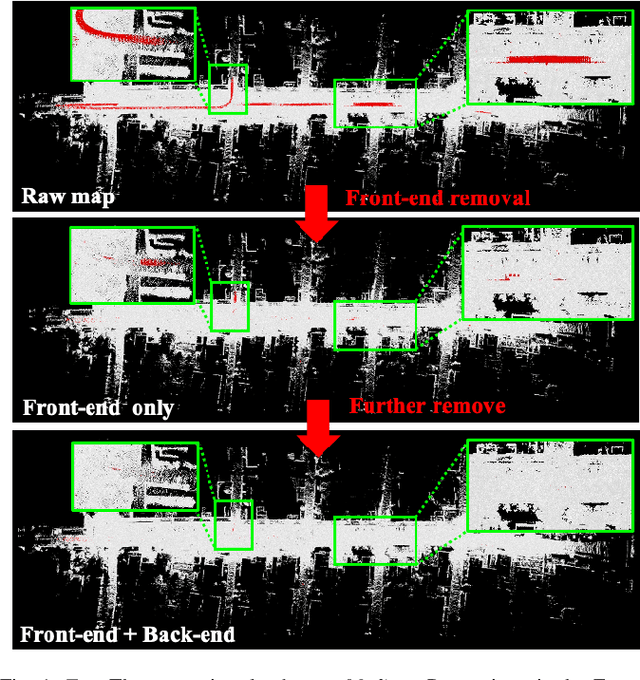
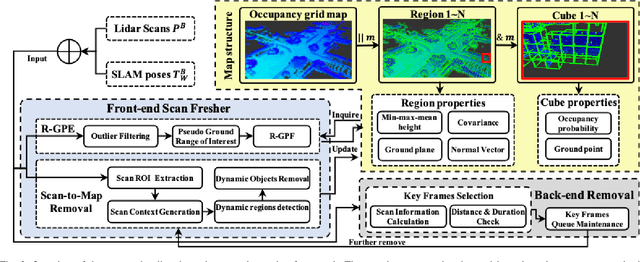
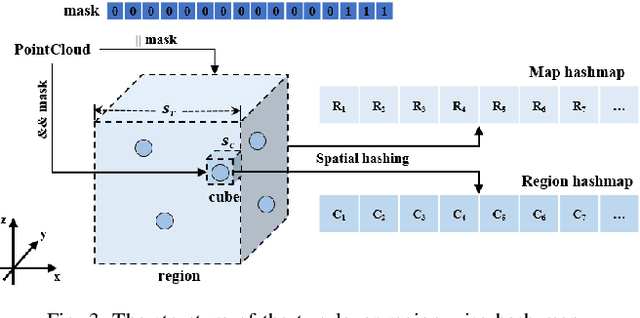
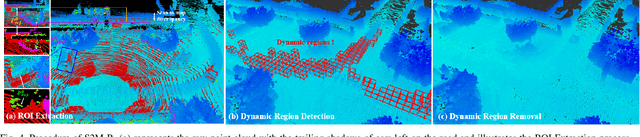
Mobile robots operating in outdoor environments frequently encounter the issue of undesired traces left by dynamic objects and manifested as obstacles on the map, impeding the robot's ability to achieve accurate localization and navigation performance. To address this problem, we present a novel online map construction framework called RH-Map. Our framework leverages a newly proposed 3D region-wise hash map data structure for efficiently removing dynamic objects in real-time. It comprises a real-time dynamic object removal front-end module S2M-R and a lightweight back-end module for further removal. We conducted extensive experiments on the SemanticKITTI dataset, and the results demonstrate that our proposed method performs favorably compared to state-of-the-art approaches, and we further validated the proposed framework in real-world environment. The source code is released and available for the community.