 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteracting Multiple Model Proprioceptive Odometry for Legged Robots
Mar 31, 2026State estimation for legged robots remains challenging because legged odometry generally suffers from limited observability and therefore depends critically on measurement constraints to suppress drift. When exteroceptive sensors are unreliable or degraded, such constraints are mainly derived from proprioceptive measurements, particularly contact-related leg kinematics information. However, most existing proprioceptive odometry methods rely on an idealized point-contact assumption, which is often violated during real locomotion. Consequently, the effectiveness of proprioceptive constraints may be significantly reduced, resulting in degraded estimation accuracy. To address these limitations, we propose an interacting multiple model (IMM)-based proprioceptive odometry framework for legged robots. By incorporating multiple contact hypotheses within a unified probabilistic framework, the proposed method enables online mode switching and probabilistic fusion under varying contact conditions. Extensive simulations and real-world experiments demonstrate that the proposed method achieves superior pose estimation accuracy over state-of-the-art methods while maintaining comparable computational efficiency.
AppleVLM: End-to-end Autonomous Driving with Advanced Perception and Planning-Enhanced Vision-Language Models
Feb 04, 2026End-to-end autonomous driving has emerged as a promising paradigm integrating perception, decision-making, and control within a unified learning framework. Recently, Vision-Language Models (VLMs) have gained significant attention for their potential to enhance the robustness and generalization of end-to-end driving models in diverse and unseen scenarios. However, existing VLM-based approaches still face challenges, including suboptimal lane perception, language understanding biases, and difficulties in handling corner cases. To address these issues, we propose AppleVLM, an advanced perception and planning-enhanced VLM model for robust end-to-end driving. AppleVLM introduces a novel vision encoder and a planning strategy encoder to improve perception and decision-making. Firstly, the vision encoder fuses spatial-temporal information from multi-view images across multiple timesteps using a deformable transformer mechanism, enhancing robustness to camera variations and facilitating scalable deployment across different vehicle platforms. Secondly, unlike traditional VLM-based approaches, AppleVLM introduces a dedicated planning modality that encodes explicit Bird's-Eye-View spatial information, mitigating language biases in navigation instructions. Finally, a VLM decoder fine-tuned by a hierarchical Chain-of-Thought integrates vision, language, and planning features to output robust driving waypoints. We evaluate AppleVLM in closed-loop experiments on two CARLA benchmarks, achieving state-of-the-art driving performance. Furthermore, we deploy AppleVLM on an AGV platform and successfully showcase real-world end-to-end autonomous driving in complex outdoor environments.
4D-ROLLS: 4D Radar Occupancy Learning via LiDAR Supervision
May 20, 2025



A comprehensive understanding of 3D scenes is essential for autonomous vehicles (AVs), and among various perception tasks, occupancy estimation plays a central role by providing a general representation of drivable and occupied space. However, most existing occupancy estimation methods rely on LiDAR or cameras, which perform poorly in degraded environments such as smoke, rain, snow, and fog. In this paper, we propose 4D-ROLLS, the first weakly supervised occupancy estimation method for 4D radar using the LiDAR point cloud as the supervisory signal. Specifically, we introduce a method for generating pseudo-LiDAR labels, including occupancy queries and LiDAR height maps, as multi-stage supervision to train the 4D radar occupancy estimation model. Then the model is aligned with the occupancy map produced by LiDAR, fine-tuning its accuracy in occupancy estimation. Extensive comparative experiments validate the exceptional performance of 4D-ROLLS. Its robustness in degraded environments and effectiveness in cross-dataset training are qualitatively demonstrated. The model is also seamlessly transferred to downstream tasks BEV segmentation and point cloud occupancy prediction, highlighting its potential for broader applications. The lightweight network enables 4D-ROLLS model to achieve fast inference speeds at about 30 Hz on a 4060 GPU. The code of 4D-ROLLS will be made available at https://github.com/CLASS-Lab/4D-ROLLS.
FreeDOM: Online Dynamic Object Removal Framework for Static Map Construction Based on Conservative Free Space Estimation
Apr 15, 2025Online map construction is essential for autonomous robots to navigate in unknown environments. However, the presence of dynamic objects may introduce artifacts into the map, which can significantly degrade the performance of localization and path planning. To tackle this problem, a novel online dynamic object removal framework for static map construction based on conservative free space estimation (FreeDOM) is proposed, consisting of a scan-removal front-end and a map-refinement back-end. First, we propose a multi-resolution map structure for fast computation and effective map representation. In the scan-removal front-end, we employ raycast enhancement to improve free space estimation and segment the LiDAR scan based on the estimated free space. In the map-refinement back-end, we further eliminate residual dynamic objects in the map by leveraging incremental free space information. As experimentally verified on SemanticKITTI, HeLiMOS, and indoor datasets with various sensors, our proposed framework overcomes the limitations of visibility-based methods and outperforms state-of-the-art methods with an average F1-score improvement of 9.7%.
Learning-Based Passive Fault-Tolerant Control of a Quadrotor with Rotor Failure
Mar 04, 2025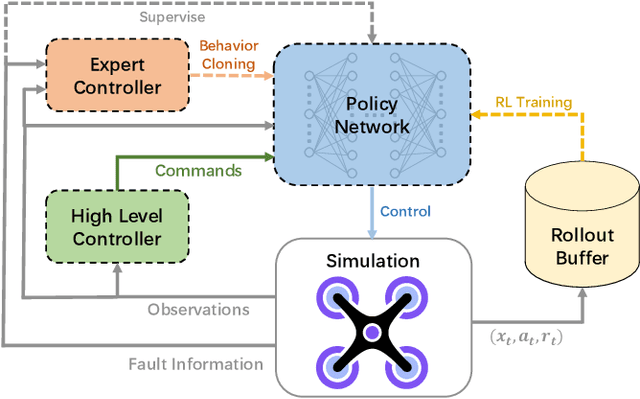
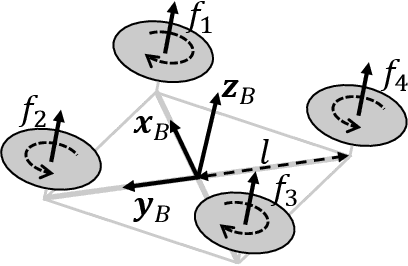
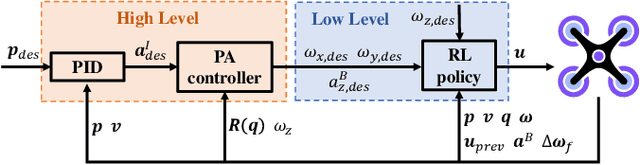
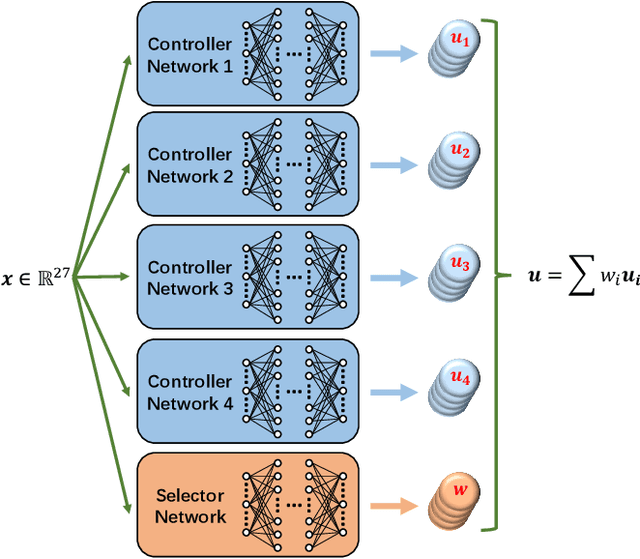
This paper proposes a learning-based passive fault-tolerant control (PFTC) method for quadrotor capable of handling arbitrary single-rotor failures, including conditions ranging from fault-free to complete rotor failure, without requiring any rotor fault information or controller switching. Unlike existing methods that treat rotor faults as disturbances and rely on a single controller for multiple fault scenarios, our approach introduces a novel Selector-Controller network structure. This architecture integrates fault detection module and the controller into a unified policy network, effectively combining the adaptability to multiple fault scenarios of PFTC with the superior control performance of active fault-tolerant control (AFTC). To optimize performance, the policy network is trained using a hybrid framework that synergizes reinforcement learning (RL), behavior cloning (BC), and supervised learning with fault information. Extensive simulations and real-world experiments validate the proposed method, demonstrating significant improvements in fault response speed and position tracking performance compared to state-of-the-art PFTC and AFTC approaches.
Robust Dynamic Control Barrier Function Based Trajectory Planning for Mobile Manipulator
Jun 22, 2024High-dimensional robot dynamic trajectory planning poses many challenges for traditional planning algorithms. Existing planning methods suffer from issues such as long computation times, limited capacity to address intricate obstacle models, and lack of consideration for external disturbances and measurement inaccuracies in these high-dimensional systems. To tackle these challenges, this paper proposes a novel trajectory planning approach that combines Dynamic Control Barrier Function (DCBF) with a disturbance observer to create a Robust Dynamic Control Barrier Function (RDCBF) planner. This approach successfully plans trajectories in environments with complex dynamic obstacles while accounting for external disturbances and measurement uncertainties, ensuring system safety and enabling precise obstacle avoidance. Experimental results on a mobile manipulator demonstrate outstanding performance of the proposed approach.
Robot Safe Planning In Dynamic Environments Based On Model Predictive Control Using Control Barrier Function
Apr 09, 2024



Implementing obstacle avoidance in dynamic environments is a challenging problem for robots. Model predictive control (MPC) is a popular strategy for dealing with this type of problem, and recent work mainly uses control barrier function (CBF) as hard constraints to ensure that the system state remains in the safe set. However, in crowded scenarios, effective solutions may not be obtained due to infeasibility problems, resulting in degraded controller performance. We propose a new MPC framework that integrates CBF to tackle the issue of obstacle avoidance in dynamic environments, in which the infeasibility problem induced by hard constraints operating over the whole prediction horizon is solved by softening the constraints and introducing exact penalty, prompting the robot to actively seek out new paths. At the same time, generalized CBF is extended as a single-step safety constraint of the controller to enhance the safety of the robot during navigation. The efficacy of the proposed method is first shown through simulation experiments, in which a double-integrator system and a unicycle system are employed, and the proposed method outperforms other controllers in terms of safety, feasibility, and navigation efficiency. Furthermore, real-world experiment on an MR1000 robot is implemented to demonstrate the effectiveness of the proposed method.
Dynamic Object Tracking for Quadruped Manipulator with Spherical Image-Based Approach
Jul 14, 2023Exactly estimating and tracking the motion of surrounding dynamic objects is one of important tasks for the autonomy of a quadruped manipulator. However, with only an onboard RGB camera, it is still a challenging work for a quadruped manipulator to track the motion of a dynamic object moving with unknown and changing velocities. To address this problem, this manuscript proposes a novel image-based visual servoing (IBVS) approach consisting of three elements: a spherical projection model, a robust super-twisting observer, and a model predictive controller (MPC). The spherical projection model decouples the visual error of the dynamic target into linear and angular ones. Then, with the presence of the visual error, the robustness of the observer is exploited to estimate the unknown and changing velocities of the dynamic target without depth estimation. Finally, the estimated velocity is fed into the model predictive controller (MPC) to generate joint torques for the quadruped manipulator to track the motion of the dynamical target. The proposed approach is validated through hardware experiments and the experimental results illustrate the approach's effectiveness in improving the autonomy of the quadruped manipulator.
Multi-kernel Correntropy-based Orientation Estimation of IMUs: Gradient Descent Methods
Apr 13, 2023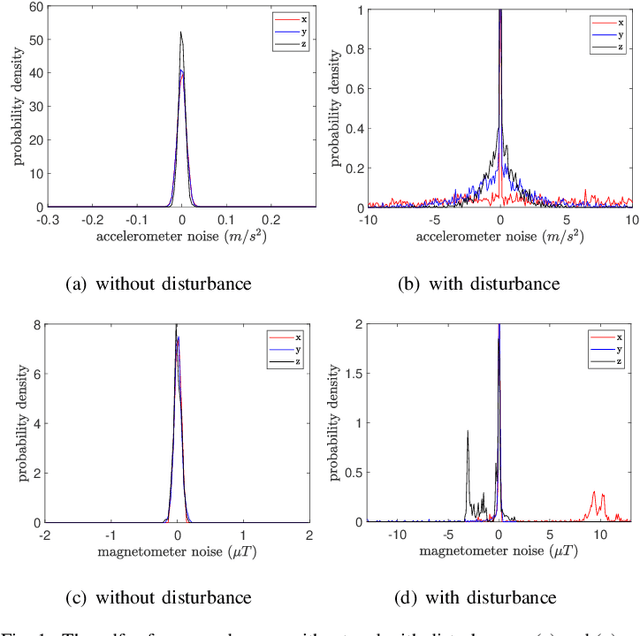
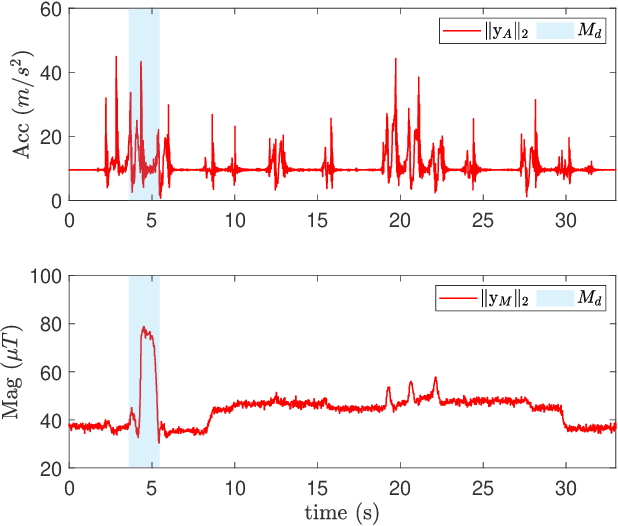
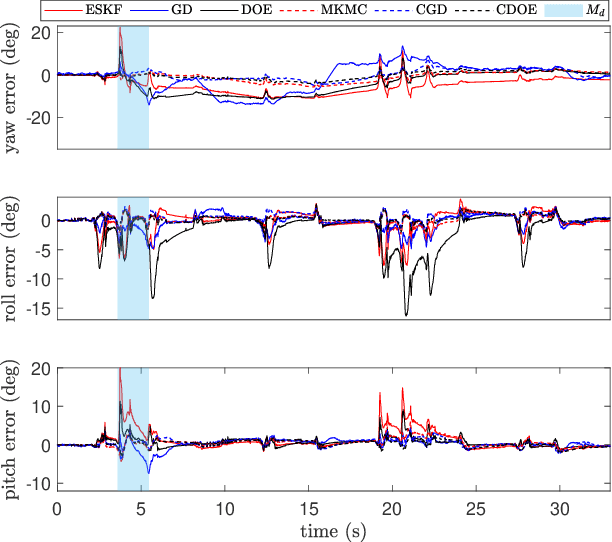
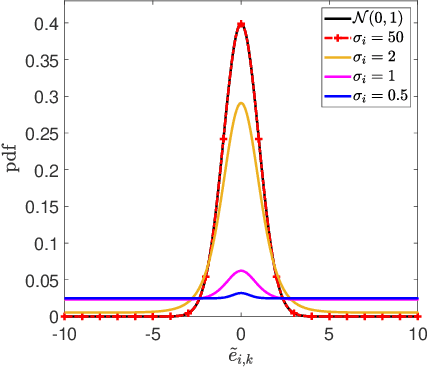
This paper presents two computationally efficient algorithms for the orientation estimation of inertial measurement units (IMUs): the correntropy-based gradient descent (CGD) and the correntropy-based decoupled orientation estimation (CDOE). Traditional methods, such as gradient descent (GD) and decoupled orientation estimation (DOE), rely on the mean squared error (MSE) criterion, making them vulnerable to external acceleration and magnetic interference. To address this issue, we demonstrate that the multi-kernel correntropy loss (MKCL) is an optimal objective function for maximum likelihood estimation (MLE) when the noise follows a type of heavy-tailed distribution. In certain situations, the estimation error of the MKCL is bounded even in the presence of arbitrarily large outliers. By replacing the standard MSE cost function with MKCL, we develop the CGD and CDOE algorithms. We evaluate the effectiveness of our proposed methods by comparing them with existing algorithms in various situations. Experimental results indicate that our proposed methods (CGD and CDOE) outperform their conventional counterparts (GD and DOE), especially when faced with external acceleration and magnetic disturbances. Furthermore, the new algorithms demonstrate significantly lower computational complexity than Kalman filter-based approaches, making them suitable for applications with low-cost microprocessors.
PC-SNN: Supervised Learning with Local Hebbian Synaptic Plasticity based on Predictive Coding in Spiking Neural Networks
Nov 24, 2022Deemed as the third generation of neural networks, the event-driven Spiking Neural Networks(SNNs) combined with bio-plausible local learning rules make it promising to build low-power, neuromorphic hardware for SNNs. However, because of the non-linearity and discrete property of spiking neural networks, the training of SNN remains difficult and is still under discussion. Originating from gradient descent, backprop has achieved stunning success in multi-layer SNNs. Nevertheless, it is assumed to lack biological plausibility, while consuming relatively high computational resources. In this paper, we propose a novel learning algorithm inspired by predictive coding theory and show that it can perform supervised learning fully autonomously and successfully as the backprop, utilizing only local Hebbian plasticity. Furthermore, this method achieves a favorable performance compared to the state-of-the-art multi-layer SNNs: test accuracy of 99.25% for the Caltech Face/Motorbike dataset, 84.25% for the ETH-80 dataset, 98.1% for the MNIST dataset and 98.5% for the neuromorphic dataset: N-MNIST. Furthermore, our work provides a new perspective on how supervised learning algorithms are directly implemented in spiking neural circuitry, which may give some new insights into neuromorphological calculation in neuroscience.