 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Pre-training of Graph Neural Networks for Million-Scale Heterogeneous Graphs
Oct 14, 2025In recent years, graph neural networks (GNNs) have facilitated the development of graph data mining. However, training GNNs requires sufficient labeled task-specific data, which is expensive and sometimes unavailable. To be less dependent on labeled data, recent studies propose to pre-train GNNs in a self-supervised manner and then apply the pre-trained GNNs to downstream tasks with limited labeled data. However, most existing methods are designed solely for homogeneous graphs (real-world graphs are mostly heterogeneous) and do not consider semantic mismatch (the semantic difference between the original data and the ideal data containing more transferable semantic information). In this paper, we propose an effective framework to pre-train GNNs on the large-scale heterogeneous graph. We first design a structure-aware pre-training task, which aims to capture structural properties in heterogeneous graphs. Then, we design a semantic-aware pre-training task to tackle the mismatch. Specifically, we construct a perturbation subspace composed of semantic neighbors to help deal with the semantic mismatch. Semantic neighbors make the model focus more on the general knowledge in the semantic space, which in turn assists the model in learning knowledge with better transferability. Finally, extensive experiments are conducted on real-world large-scale heterogeneous graphs to demonstrate the superiority of the proposed method over state-of-the-art baselines. Code available at https://github.com/sunshy-1/PHE.
MV-CoRe: Multimodal Visual-Conceptual Reasoning for Complex Visual Question Answering
Aug 09, 2025Complex Visual Question Answering (Complex VQA) tasks, which demand sophisticated multi-modal reasoning and external knowledge integration, present significant challenges for existing large vision-language models (LVLMs) often limited by their reliance on high-level global features. To address this, we propose MV-CoRe (Multimodal Visual-Conceptual Reasoning), a novel model designed to enhance Complex VQA performance through the deep fusion of diverse visual and linguistic information. MV-CoRe meticulously integrates global embeddings from pre-trained Vision Large Models (VLMs) and Language Large Models (LLMs) with fine-grained semantic-aware visual features, including object detection characteristics and scene graph representations. An innovative Multimodal Fusion Transformer then processes and deeply integrates these diverse feature sets, enabling rich cross-modal attention and facilitating complex reasoning. We evaluate MV-CoRe on challenging Complex VQA benchmarks, including GQA, A-OKVQA, and OKVQA, after training on VQAv2. Our experimental results demonstrate that MV-CoRe consistently outperforms established LVLM baselines, achieving an overall accuracy of 77.5% on GQA. Ablation studies confirm the critical contribution of both object and scene graph features, and human evaluations further validate MV-CoRe's superior factual correctness and reasoning depth, underscoring its robust capabilities for deep visual and conceptual understanding.
Learning-Based Passive Fault-Tolerant Control of a Quadrotor with Rotor Failure
Mar 04, 2025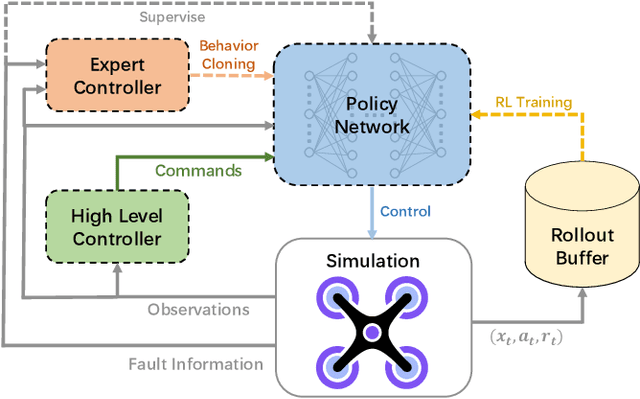
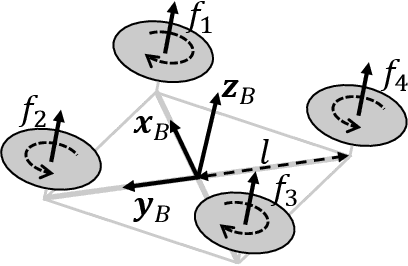
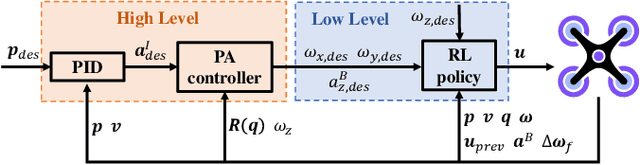
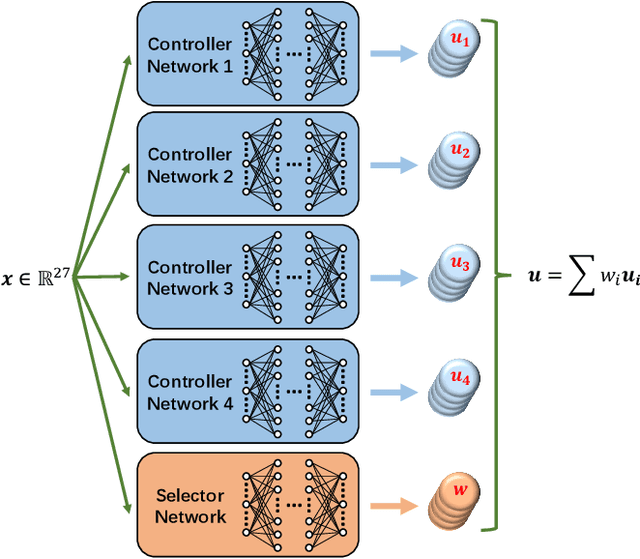
This paper proposes a learning-based passive fault-tolerant control (PFTC) method for quadrotor capable of handling arbitrary single-rotor failures, including conditions ranging from fault-free to complete rotor failure, without requiring any rotor fault information or controller switching. Unlike existing methods that treat rotor faults as disturbances and rely on a single controller for multiple fault scenarios, our approach introduces a novel Selector-Controller network structure. This architecture integrates fault detection module and the controller into a unified policy network, effectively combining the adaptability to multiple fault scenarios of PFTC with the superior control performance of active fault-tolerant control (AFTC). To optimize performance, the policy network is trained using a hybrid framework that synergizes reinforcement learning (RL), behavior cloning (BC), and supervised learning with fault information. Extensive simulations and real-world experiments validate the proposed method, demonstrating significant improvements in fault response speed and position tracking performance compared to state-of-the-art PFTC and AFTC approaches.
Beyond Models! Explainable Data Valuation and Metric Adaption for Recommendation
Feb 12, 2025User behavior records serve as the foundation for recommender systems. While the behavior data exhibits ease of acquisition, it often suffers from varying quality. Current methods employ data valuation to discern high-quality data from low-quality data. However, they tend to employ black-box design, lacking transparency and interpretability. Besides, they are typically tailored to specific evaluation metrics, leading to limited generality across various tasks. To overcome these issues, we propose an explainable and versatile framework DVR which can enhance the efficiency of data utilization tailored to any requirements of the model architectures and evaluation metrics. For explainable data valuation, a data valuator is presented to evaluate the data quality via calculating its Shapley value from the game-theoretic perspective, ensuring robust mathematical properties and reliability. In order to accommodate various evaluation metrics, including differentiable and non-differentiable ones, a metric adapter is devised based on reinforcement learning, where a metric is treated as the reinforcement reward that guides model optimization. Extensive experiments conducted on various benchmarks verify that our framework can improve the performance of current recommendation algorithms on various metrics including ranking accuracy, diversity, and fairness. Specifically, our framework achieves up to 34.7\% improvements over existing methods in terms of representative NDCG metric. The code is available at https://github.com/renqii/DVR.